
[AFRC] 서보 프로그램카드 설정 방법 (알리서보)
컨제입니다.
최근 알리에서 구매한 AFRC 드리프트 서보의 프로그래밍 설정을 알아보겠습니다.
사용할 서보는 'D3519HB-S Low Profile Programmable HV Brushless Servo' 입니다.
서보가 준비되어있다는 전제 하에
우선 제조사 홈페이지를 방문하여 프로그램을 다운받아야 합니다.
제조사 홈페이로 이동합니다.
https://hk-afrc.com/
HK-AFRC
HK-AFRC
hk-afrc.com
다운로드 메뉴를 클릭합니다.

여러 메뉴얼 및 프로그램중 AFRC 서보 프로그램 V3버전을 다운로드 받습니다.
다운로드 받은 AFRC Servo Program V3.zip 파일의 압축을 풀어 폴더로 들어갑니다.
총 3개의 파일이 존재하는데
실행파일인 'AFRC Servo Program V3.exe' 을 실행하면
윈도우 보안프로그램에서 경고성 메시지를 띄웁니다.
이때 닫기를 누르면 강제로 프로그램이 종료되니,
실행 버튼을 클릭해야 합니다.
프로그램이 정상적으로 실행되었습니다.
여러 기본 값들이 들어가 있습니다.
이제 서보를 연결할 차례
동봉된 서보 프카인 USB를 서보와 연결합니다.
단순 +,-,S 선만 구분하므로 시그널 연결선인 S만 잘 맞게 연결하면 크게 문제될건 없어보입니다.

PC USB단자에 USB 프카를 연결합니다.
그리고 우측에 [READ] 읽기 버튼을 클릭합니다.
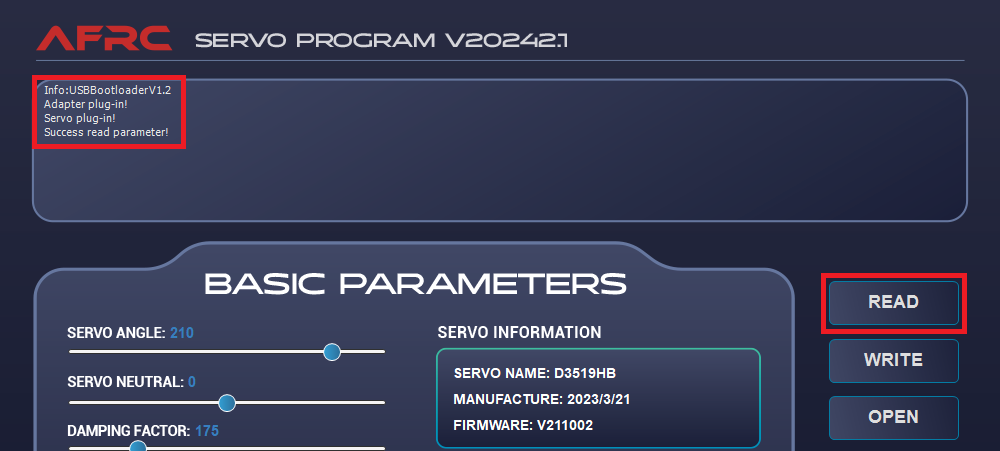
상단에 정상적으로 서보의 값을 읽어들여집니다.
여기서 셋팅할 부분은 간단합니다.
1. Damping Factor 값을 175로 설정합니다.
→ 아래 부분에서 자세히 설명
2. Sensitivity 값을 High로 설정합니다.
→ 즉 민감도의 설정을 의미
너무 과도한 민감도는 서보에 무리를 주어 고장으로 이어질 수 있으니 적당한 High수준으로 설정, 최초 연결시 Ultra High로 설정되어 있음.
(※ 어디까지나 개인적인 설정 수치이니 절대적인건 아닙니다.)
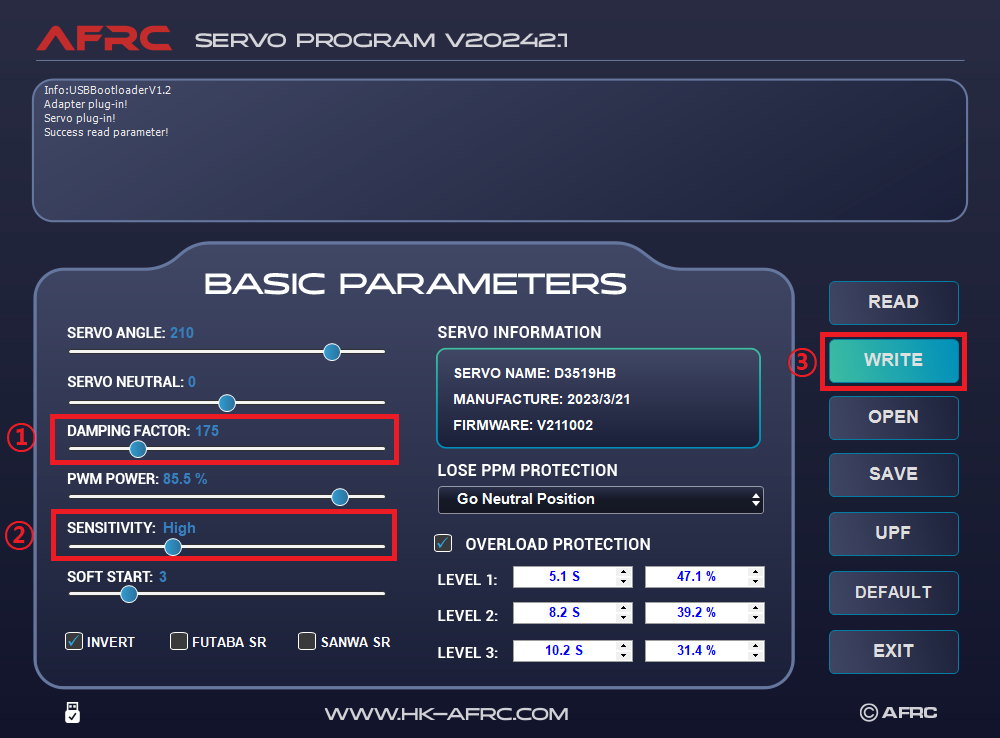
나머지 값들은 기본값 그대로 두고 우측의 [WRITE] 크기 버튼을 클릭합니다.
상대 로그 창에 정상적으로 쓰기가 되었다고 합니다.
이제 USB 프카를 제거하여 서보를 사용하면 됩니다.
여기서 Damping Factor 란?
서보(Servo)에서 말하는 Damping Factor(감쇠 계수)는 시스템의 진동 특성에 중요한 역할을 하며, 서보 모터와 같은 제어 시스템에서 안정성과 응답 속도에 직접적인 영향을 미칩니다. 이를 이해하기 위해서는 감쇠(Damping)의 개념과 서보 시스템에서 어떻게 작용하는지 살펴봐야 합니다.
1. 감쇠(Damping)의 기본 개념
감쇠는 시스템에서 발생하는 진동이 점차 줄어들어 안정 상태에 도달하는 과정을 설명합니다. 감쇠 계수는 그 진동이 얼마나 빠르게 소멸되는지를 나타내는 척도입니다. 제어 시스템에서 감쇠는 과도한 진동이나 오버슈트(Overshoot)를 방지하고 시스템의 안정성을 보장하는 데 중요한 역할을 합니다.
- 과감쇠(Overdamped): 감쇠가 너무 커서 시스템이 매우 느리게 안정 상태에 도달하지만 진동이 거의 발생하지 않는 상태.
- 임계감쇠(Critically Damped): 가장 빠르게 안정 상태에 도달하는 감쇠. 진동 없이 목표 지점에 도달.
- 저감쇠(Underdamped): 약간의 진동이 발생하며 시간이 지나면서 진동이 점차 줄어드는 상태.
- 무감쇠(UnDamped): 감쇠가 전혀 없어서 진동이 계속 유지되는 상태.
2. 서보 시스템에서 Damping Factor
서보 모터는 위치, 속도, 토크를 제어하기 위해 사용되며, 이때 피드백 시스템을 사용해 정확하게 목표 위치나 속도를 추적합니다. 그러나 서보가 목표 위치나 속도에 도달하는 과정에서 진동이나 과도한 오버슈트가 발생할 수 있는데, 이때 Damping Factor가 그 영향을 조절합니다.
주요 역할:
- 안정성 확보: 적절한 감쇠가 없으면 서보 시스템은 목표 위치에 도달할 때 진동하거나 오버슈트가 발생할 수 있습니다. 감쇠 계수가 적절하면 이런 불필요한 진동을 줄여 시스템이 빠르게 안정 상태에 도달할 수 있습니다.
- 응답 속도: 감쇠 계수는 시스템의 응답 속도에 영향을 미침니다다. 너무 낮으면 시스템이 진동하고, 너무 높으면 목표 지점에 도달하는 데 시간이 오래 걸립니다.
- 오버슈트 최소화: 서보 시스템이 과도한 오버슈트를 보이지 않고 부드럽게 목표 지점에 도달하게 돕습니다. 적절한 감쇠는 오버슈트를 최소화하고 시스템이 효율적으로 작동하게 합니다.
3. 감쇠 계수 조정
서보 시스템의 감쇠 계수는 일반적으로 PID 제어기의 D(미분 제어) 부분에서 조정됩니다. 미분 제어는 시스템의 속도 변화를 감지하여 진동을 억제하고 감쇠 효과를 제공합니다. 감쇠 계수를 잘못 설정하면:
- 너무 낮은 감쇠 계수는 서보 모터가 진동하거나 불안정해질 수 있음.
- 너무 높은 감쇠 계수는 시스템의 반응이 느려지고 목표 지점에 도달하는 속도가 감소.
4. 감쇠 계수와 주파수 응답
서보 시스템의 감쇠 계수는 시스템의 고유 진동수와 상관관계가 있습니다. 시스템이 특정 주파수에서 어떻게 반응하는지를 나타내는 주파수 응답에서, 감쇠 계수가 낮으면 공진 주파수에서 진폭이 커질 수 있고, 감쇠 계수가 높으면 시스템이 안정적이지만 반응성이 떨어집니다.
결론
서보의 Damping Factor 는 시스템의 진동과 안정성을 조절하는 중요한 요소이며, 적절한 감쇠는 진동을 억제하고 안정적으로 목표 위치에 도달하도록 하여 서보의 움직임을 빠르고 정확하게 목표 위치에 도달할 수 있게 하는 설정값.