컨제입니다.
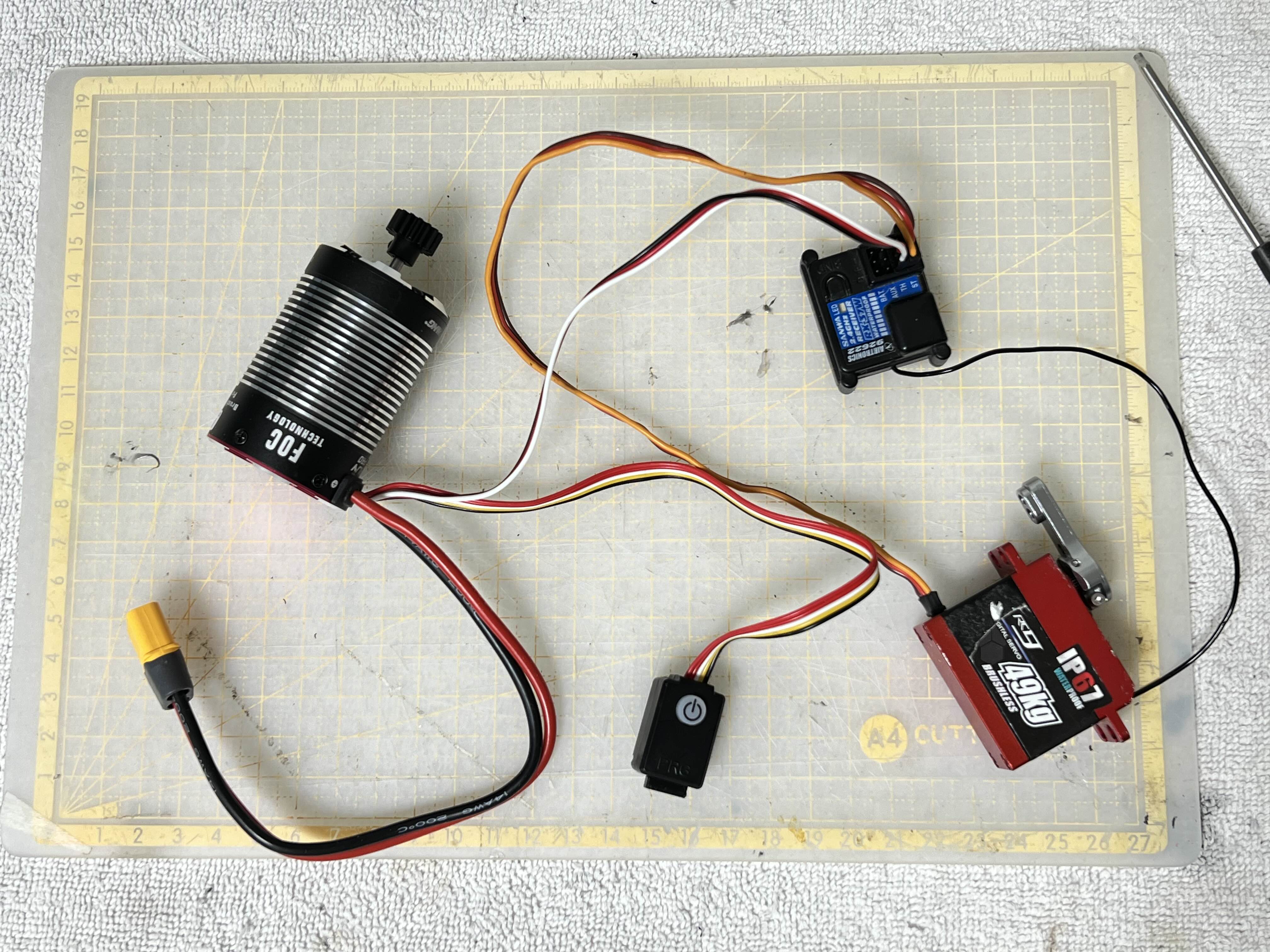
새로이 구매한 하비윙 퀵런 퓨전 프로 (2300kv), RC9 49kg 서보, 산와 RX-37W 수신기를 꺼내봅니다.

퓨전프로의 포장을 뜯고 연결을 하고 기자재 테스트를 진행해봅니다.
퓨전시리즈의 특징인 모터+변속기 일체형이다보니 연결도 쉽고 너무 간편해서 좋습니다. 퓨전SE에 이어 퓨전프로의 힘이 기대됩니다.
송수신기 바인딩 후 테스트시 모두 정상 확인 완료!
이제
기어박스를 구매시 동봉되어 있던 스키드 플레이트를 꺼냅니다.
길이를 재어보니 폭이 72mm 나옵니다.

링크로드를 연결해야 하므로 볼엔드를 먼저 달아주고
그리고 샷시에 장착합니다.

그렇게 순조롭게 빌드를 진행하는데,
이런.....!!!!!!! 😫
문제가 생겼습니다. (1차 문제 발생)
샷시의 폭이 약 68mm로 스키드 플레이트가 너무 커서 들어가질 않습니다. 어떻게해야 하나 고민하다가
플레이트의 길이를 68mm로 맞추기로 하고 72mm이니 양 쪽을 2mm씩 잘라내기로 합니다.
다행히 플레이트의 재질이 쉽게 개지는 플라스틱이 아닌 충격에도 견고한 딱딱한 고무(?)재질이라 아크릴 컷팅칼로 슥슥 그어주고 니퍼로 꺽어주니 원하는 모양대로 똑 부러져주었습니다.

양쪽을 컷팅 후 사포로 갈끔히 마감해주고 샷시에 장착을 해주었습니다.
깔끔하네요 만족!

그런데......😫😫
여기서 2차 문제가 발생합니다.
샤시의 폭과 플레이트의 길이가 68mm인데, 여기에 기어박스와 모터를 장착해보니 폭이 좁아 도저히 둘다 연결할 수 없는 상태가 되어버립니다ㅠㅠ
방법이 하나 있다면, 기어박스와 모터를 스탠드오프(STANDOFF)나사로 위로 띄워서 샷시와 간섭이 없게끔 하는 방법이 있으나, LCG 인 저중심성에 반하는 행위라 생각되어 다른방법을 찾게 됩니다.
결국
샷시와 스키드 플레이트 사이에 3mm 스페이서를 끼워서 사이즈를 벌려 연결하기로 합니다.
M3 너트와 와셔를 연결하여 3mm를 맞추고 샷시를 구성하는 연결 브라켓 전부 스페이스를 끼워 폭을 넓혀주었습니다.

폭을 넓혔더니 다행히 기어박스와 모터를 장착되어 집니다.
휴~~
그리고는 곧바로 이어서 드라이브샤프트 까지 다 연결 후에 동작 시뮬레이션을해보니...
여기서 3차 문제가 발생합니다.....😫😫😫
만약 이대로 주행시 드라이브샤프트와 샷시간 간섭이 상당할것으로 보이는 것이었습니다. 거의 낑기듯 들어간 드라이브 샤프트...
특히나 고속 회전시는 주위가 다 갈릴것 같은 느낌 팍;;;

또한 반대쪽도 드라이브 샤프트 이외에도 우측 모터부분도 샷시와 직접적으로 닿으면서
추가로 달아야할 링크로드를 연결할 수 있는 공간이 전혀 없어지게 되었습니다.
이를 어쩌나 고민하다가
공간을 벌려 우선 집어넣어줍니다. 섀시랑 모터가 닿을랑 말랑...

Before) 모터 장착전

After) 모터 장착 후

장착된 기어박스 + 모터의 조합을 가만히, 유심히 들여다보니...
아차! 놓친게 하나 있었습니다!!!
여러종류의 기어박스 중에서 제가 선택한 기어박스는 단순히 모터의 동력을 앞뒤로 분배해주는 것 뿐만 아니라
뒷쪽으로 가는 동력을 30% 낮춰서 가도록 배분하는 기어박스였기에
앞/뒤 를 구분없이 장착하는게 아닌 정해진 방향으로만 장착해야만 하는것이었습니다.
만일 위 사진처럼 앞뒤를 거꾸로 장착할 경우, 프론트의 구동력이 30% 감소되고 리어가 더 빠른 상황에 이르게 되는 것입니다.
그래서 다시,,,
샷시를 앞쪽으로 놓고 봤을때 모터는 왼쪽에 위치하도록 재조정을 한 후 장착했습니다.
그리고, 이어서 또 다른문제가 발생..............
그 문제는 다음글에서 이어서 작성해보겠습니다.
-끗-
'RC_Car > RC 커스텀 LCG 빌드' 카테고리의 다른 글
| [LCG] 커스텀 전용 LCG 빌드 4 - 링크로드 연결 (0) | 2024.04.22 |
|---|---|
| [LCG] 커스텀 전용 LCG 빌드 3 - 문제점발생, 액슬변경 (0) | 2024.04.15 |
| [LCG] 커스텀 전용 LCG 빌드 1 - 샷시조립 (0) | 2024.03.18 |
| [LCG] 커스텀 전용 LCG 빌드 - 사전 준비물품 (0) | 2024.03.15 |
| blue marlin illustration (0) | 2024.02.25 |