지인들과 돌빡을 비비기 위해 '인천 아시아드 경기장' 내에 있는 인공 수변공간을 방문했습니다.
지난 10월경에 안양사 산행 이후로 정말 오랜만에 LCG 차량을 가지고 외부로 나와봤는데요
새로운 장소를 경험해보자 하여 참여하게 되었습니다.
위치는 대략 이렇습니다.
여름엔 수변 공간이라 물이 차서 제한이 좀 있고
지금은 동절기라 물이 없어 이용이 가능..
한참을 그렇게 즐기고 있는데,
갑자기 차량의 주행 반경이 이상해집니다.
드리프트 차량도 아닌데 바퀴의 모양에 캠버가 들어가보이네요
뭐지?
하고 차량을 들어 보니 축 쳐지는 우측 앞바퀴..
앗 견적이다.. ㅠㅠ
준비한 차량이 청새치 LCG뿐이라, 그 이후로는 돌빡타임이 아닌 노가리 타임이 되어버렸습니다.
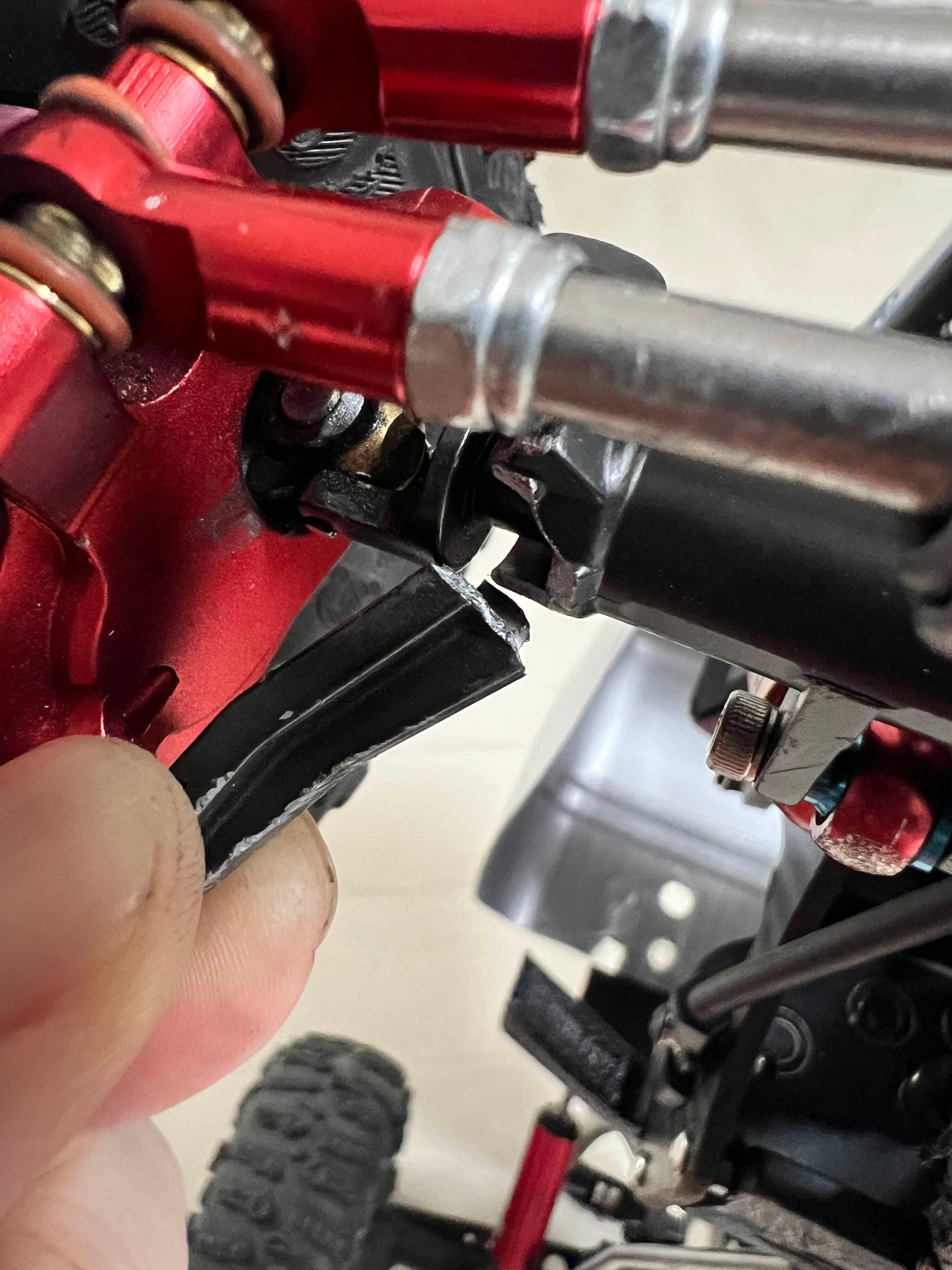
크랙간 부분을 접사로 찍어봤습니다.
뽀각 두동강이 난 포탈너클..
파손 원인을 곰곰히 생각해봅니다.
1. 누적된 데미지로 인한 손상 - 장르 특성상 저속에서 높은 토크가 지속적으로 가해지는 상황이 빈번하기도 하고 그 과정에서 특정 부위에 반복적인 하중이 걸릴 가능성. - 그 데미지가 누적되고 그로인해 파손부위에 미세한 균열(크랙)이 생기고 이 크랙이 점점 커지면서 어느 순간 완전히 파손되었을 가능성.
2. 재료의 품질 문제 - 포털 액슬부분의 만듬 재질이 강화 알루미늄(혹은 합금)으로 보이는데, 구매처가 중국산 알리발 이므로 아무래도 제조 과정에서 미세한 기공(기포)이나 불균일한 강도 분포가 있지 않았을까 하는 생각. - 또는 특정 부분이 약해서 피로 누적이 빠르게 진행되었을 수도 있음.
3. 기온 변화나 환경적인 요인 - 낮은 온도에서 재질에 상관없이 깨질 가능성이 높아짐. - 주행당시 온도가 약 영상 2도~ 3도 사이였던것으로 보이는데 (날씨 어플로 확인) 상온날씨는 아니므로 영향이 있었을수도 있을것.
4. 설계적 문제 또는 충격 누적 - 포털 액슬 구조상 너클 부분은 도그본을 통해 오는 힘을 지탱하는데, 특정한 각도에서 지속적으로 작은 충격이 누적될 수 있음. - 서스펜션 세팅(예: 너무 단단한 쇽 스프링)이나 주행 스타일(예: 바위에 한쪽 바퀴가 반복적으로 걸리는 상황)도 영향을 줄 수 있음.
어찌되었든 차체의 큰 낙상은 없었으므로 한가지의 이유만으로는 아닌듯 싶고 여러 복합적인 형태의 누적치가 아닐까 생각됩니다.
이 LCG 차량을 빌드 후 제법 주행을 했던것 같은데 다시 재정비 해서 새 엑슬로 교체를 해주던지 아니면 파손된 부위를 용접(?)해서 붙이던지 하는 방법을 고민해 봐야겠습니다. (같은 알리발 엑슬로 갈아야 하나 고민아닌 고민이 되는건 사실)
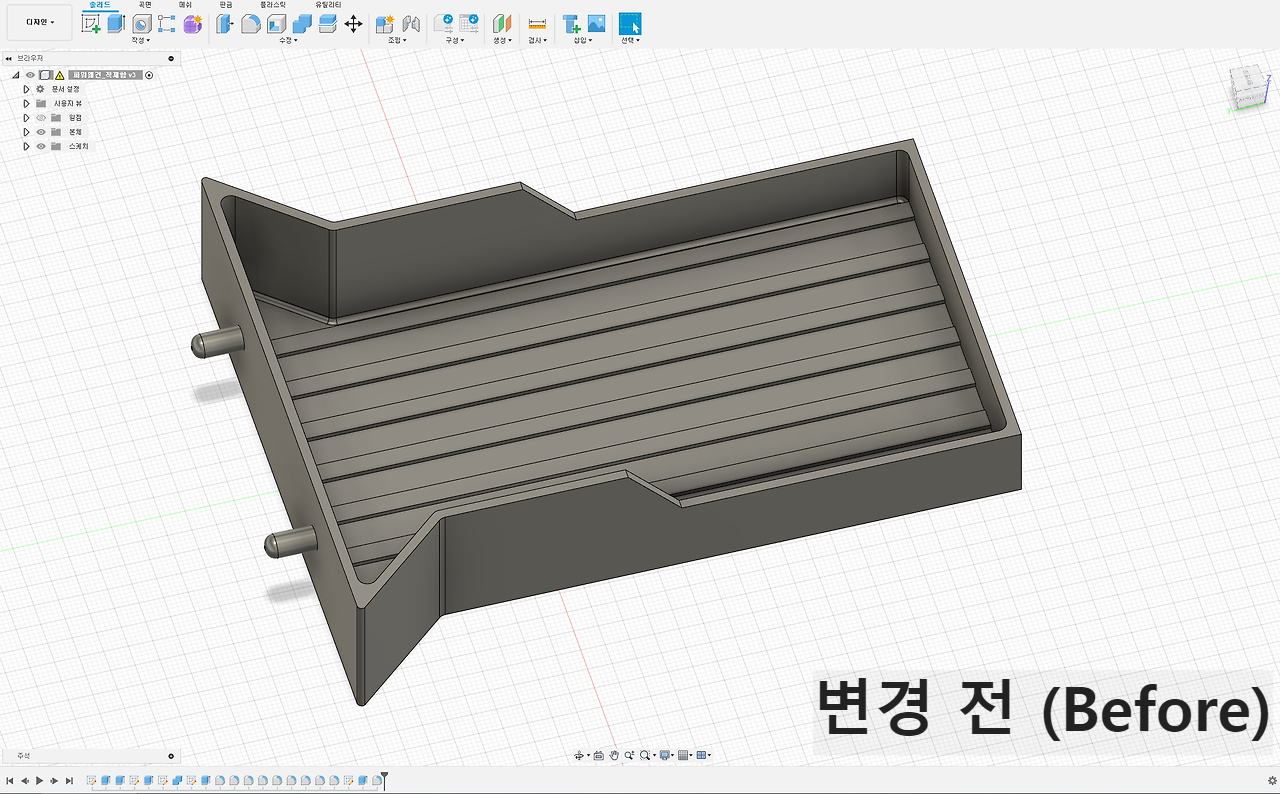
우선 길게 차량의 꽁무니 부분까지 덮던 적재함의 길이를 줄여보았습니다. 이유인즉, 차량이 고각에 올라섰을때 샷시의 끝부분이 바닥에 닿게되고 그로인해 주변 장애물들과 간섭이 생기는 일이 생겼습니다. 또한 PLA 출력물이고 두께가 두껍지 않아 무게는 가벼운 편이지만 고각 진입시 아무래도 차량의 뒷부분의 단 1g이라도 그 무게로 인해 잡아당기김이 발생할것 같다는 생각에 무게를 줄여보고자 반토막 내어진 적재함으로 변경해보았습니다. 아예 다 빼지 않고 반을 남긴 이유는 바디를 고정시키는 돌출부위를 남겨두기 위함입니다.
모델링은 기존 적재함에서 반토막 낸 버전으로 재 변경 후 출력
차량에 장착해 주었습니다.
장착한 쇼티(shorty) 적재함 버전.
리어 액슬과 샤프트 연결부위가 그대로 보입니다.
뒷모습은 이렇습니다.
변경점 2. 배터리 마운트 지지대 변경
기존 배터리 마운트를 지지하던 지지대 위치를 변경하였습니다.
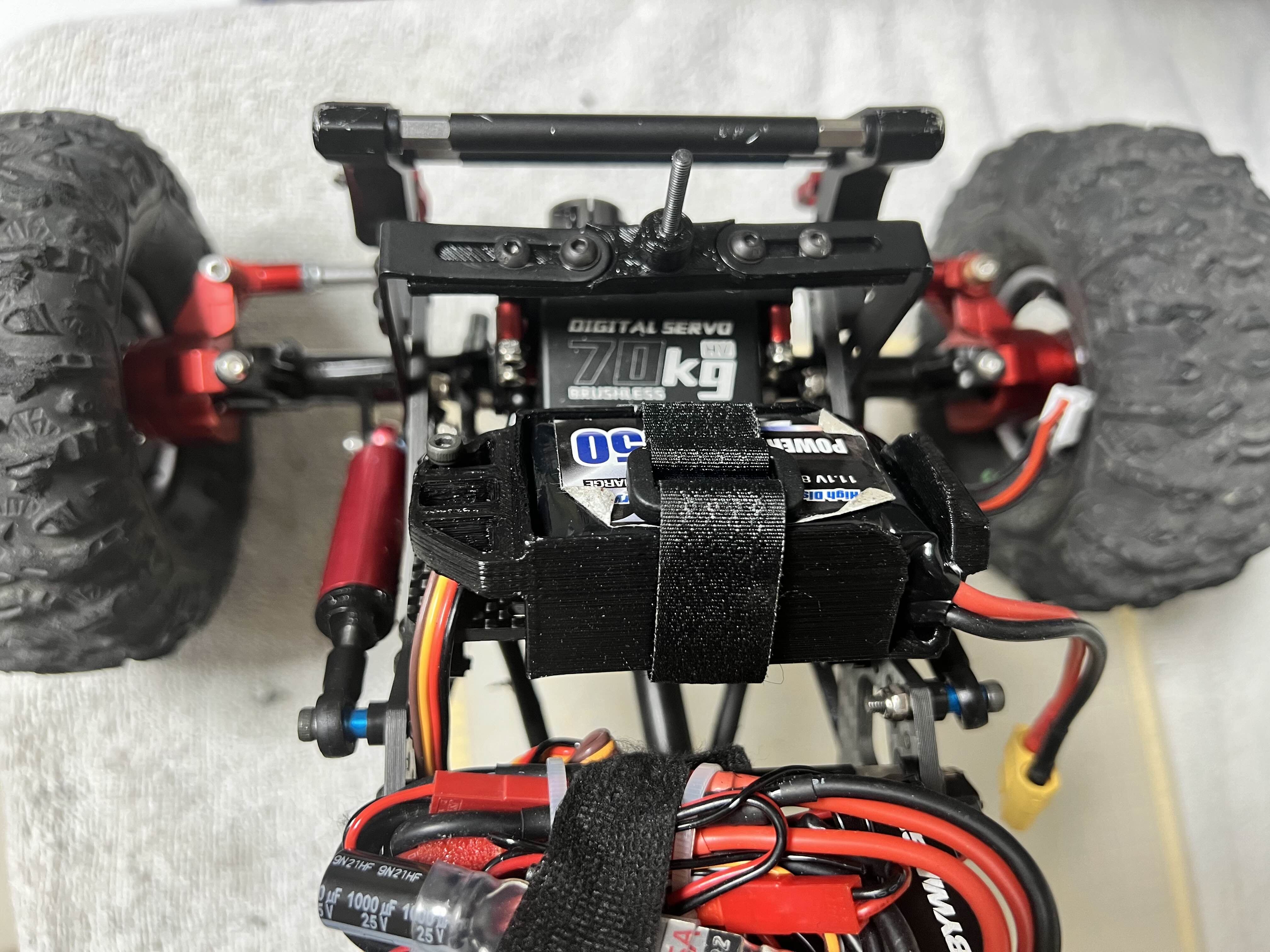
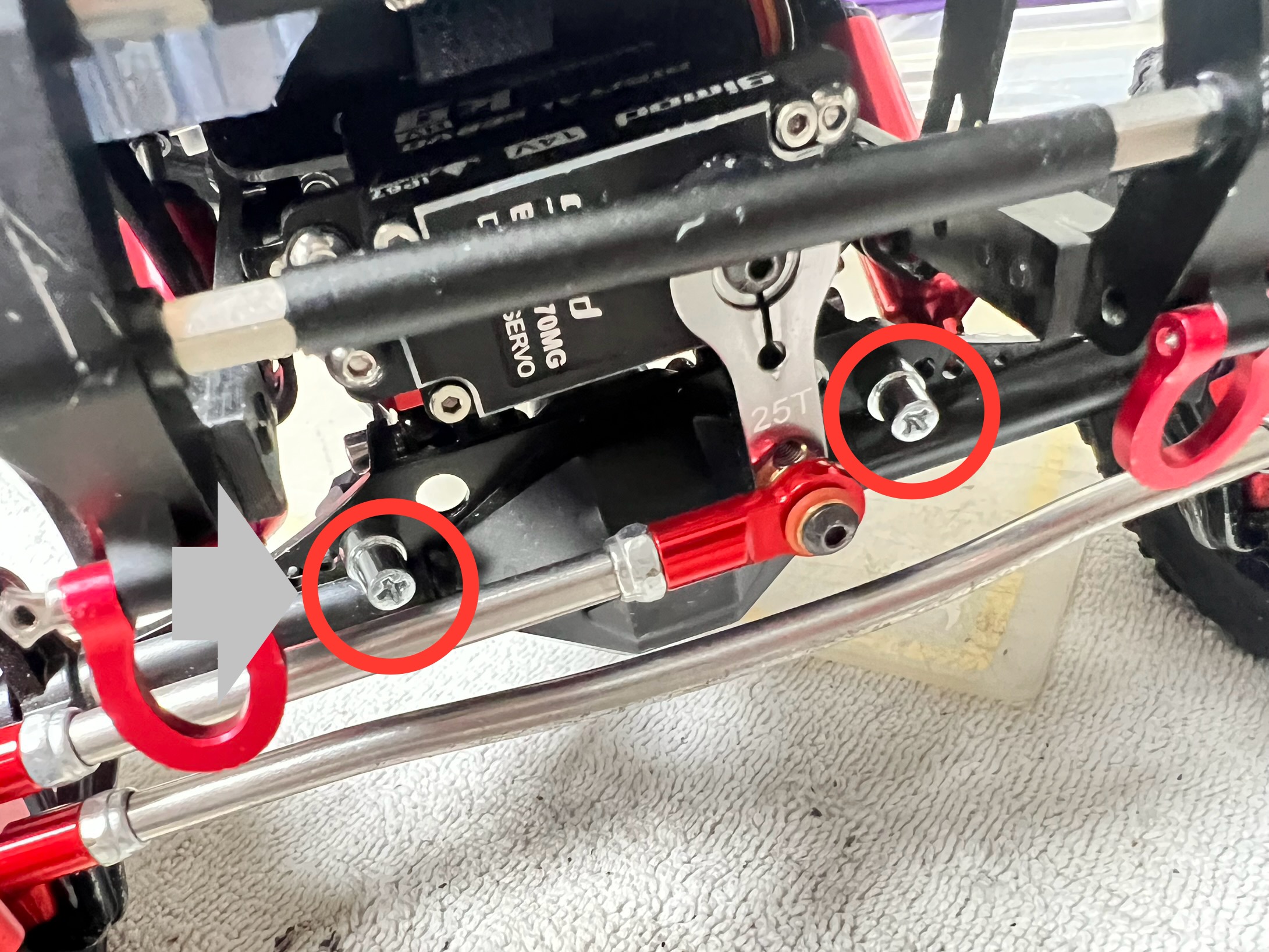
일단 서보를 기존 서보에서 70kg 직결서보로 교체하였는데, 이 서보 크기로 인해 쇽이 완전히 눌렸을때 배터리 마운트 거치대와 닿아서 간섭이 생기고 있었습니다. 그래서 거치대를 아예 제거할까 하다가 샷시에 지지해주는 L자형 부품을 지면과 수평으로 맞추지 않고 차량 앞쪽으로 쏠리게끔 45도 각도로 뉘어지게끔 장착을 해보았습니다. 고각에서 차량이 앞바퀴를 들어 서있다고 가정했을시 조금이라도 앞쪽으로 무게중심을 옮기기 위함이기도 합니다.
배터리 거치대가 샷시와 평행하게 장착배터리 거치대가 샷시와 45도 경사로 장착
측면에서 보면 45도 기울어져 있습니다.
위에서 본 모습
역시 측면모습
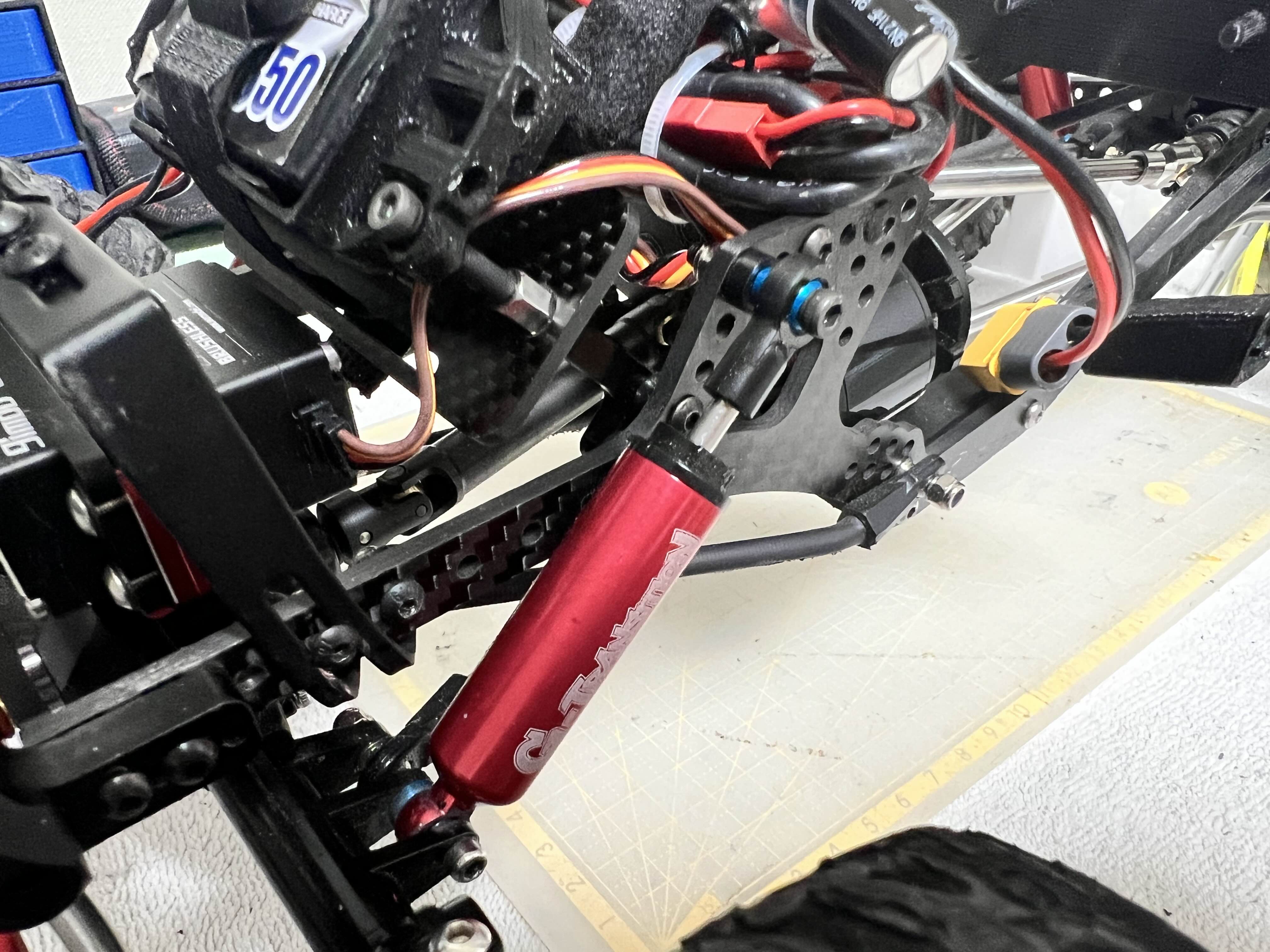
변경점 3. 프론트 쇽위치 변경
배터리 마운트 거치대도 각을 줄이면서 처음에 샷시에 연결했던 나사구멍을 위로 한칸 올려보았습니다. 이로써 차체가 좀더 밑으로 깔리게 되었습니다. 차량의 전체적인 상황은 프론트가 좀더 앞쪽으로 쏠리는 형상. 역시나 무게중심을 앞으로 치우치기 위함입니다. 이건 어디까지나 테스트 해볼 목적이라, 만일 장점없이 걸림등의 개선되지 못하는 모습이 보인다면 바로 원복하거나, 또다른 방안을 모색할 예정입니다.
원래는 바로 한칸 아래 구멍에 장착했으나 위로 한칸 올리면서 차체를 좀더 아래로 낮추어 보았습니다.
변경점 4. 바디 컷팅
LCG 차량의 전체적인 모습이 좀 높아 보이는(?) 경향이 있어, 바디의 둘레를 전부 약 1cm가량 컷팅해주었습니다.
또한 컷팅으로 인해 바디가 붕 떠보이는걸 방지하기 위해 기존에 뚫었던 구멍을 위쪽으로 하나씩 더 뚫었습니다.
고각을 정복하기 위해 이리 구르고 저리 구르다보니 바디 뒷쪽이 많이 찢어지고 깨져서 유리섬유 테잎으로 대충 보강해줬습니다. 알리산 바디이므로 부담없이 막 쓰고 교체하면 되니 맘이 편합니다ㅋ
새로 뚫은 구멍에 바디를 장착한 모습
또 모든 면을 잘라내었기에 바디 좌우 측면에 붙여둔 청새치 데칼의 일부분이 잘려나가는 불상사가 발생했습니다. 뭐 이건 나중에 다시 붙여주는걸로~
청새치의 꼬리 및 아래부분에 있던 레터링이 모두 잘려나간 상태..
변경점 5. 약간의 웨이트 추가
프론트는 중량, 리어는 경량화를 위해..
미비하지만, 그래도 차량의 앞쪽에 단 몇g의 웨이트를 추가해보고자 엑슬에 뚫려있는 구멍에 무게가 살짝 있는 나사를 체결해 보았습니다. 이것도 테스트 삼아 장착해보았는데, 이부분에 좀더 제대로 된 묵직한 웨이트를 어떻게 달아줘볼지 아직 고민중이긴 합니다.
. . .
최종적인 모습
이렇게 사진으로 비교해보니 확실히 차체가 낮아졌음이 느껴집니다.
바디도 컷팅해서 마운트부분도 낮추고, 쇽위치도 올려 장착함으로써 차체도 약간 내려왔으니 당연한 결과이겠지요.
뒤에 달아두었던 안테나+오리 조합도 역시나 무게때문에 제거를 해두었지만, 언제든 달고 싶은 마음이 들면 달게될지도 모르겠네요ㅋ
첫 빌드시 RC9 49kg 서보로 시작해서 두번째 알리발 얀타르 50kg LP서보를 거쳐 좀더 토크를 올려보고자 역시 알리발 9imod 70kg 직결서보를 선택해 보았습니다.
보통의 서보 연결방식이라면 수신기에 연결되어 수신기에서 나오는 5v의 전압으로 운용될테지만 그에따른 전력의 한계가 있어 특정 이상의 토크를 발휘하기엔 한계가 있습니다. 그래서 수신기의 전원을 사용하지 않고 배터리에 직접 연결되어 높은 전압을 그대로 사용함으로써 보다 쎈 토크를 사용할 수 있는 일명 직결서보를 사용햐보고자 합니다.
이 때문에 직결서보에는 수신기잭과 jst잭 두개가 공존하고, 보통의 서보라면 3가닥의 선만 있을텐데 직결서보에는 4가닥의 선이 존재하는것이 특징 입니다.
커스텀 LCG 빌드 하여 모변을 퓨전프로 에서 통돌이+AM32 조합으로 변경하고 몇번의 산행을 즐겼습니다.
그동안 3셀 리포 배터리로만 운용했는데, 4셀로 사용시 초저속 및 고속에서도 힘있게 움직이는 차를 체험 해봤기에 4셀 배터리도 추가 구매 했고 잘 도착해주어 주말을 이용해 가까운 안양사로 주행 테스트를 나갔습니다.
새로 구매한 4셀도 산행 전 집에서 문제 없이 테스트 했던 터라 너무도 자연스레 산행을 시작 했는데, 산행 초입 10m 앞에 있는 바위를 비비고 잠시 대기를 하던중...
이상한 타는 냄새가 나고있음을 감지했고 순간적으로 차체로 시선을 향하니 바디 안쪽에서 하얀 연기가 모락모락 피어나고 있었습니다.
문제가 있구나 싶어 후다닥 바디를 벗기고 연결되어 있던 xt60 전원 플러그를 바로 제거 했습니다. 하얀 연기와 진동하는 냄새는 변속기에서 발생하고 있던 것이었습니다.
이런....
일단 준비한 차량은 이 LCG 뿐이라, 동행하기로 했던 크루들이 속속 도착했기에 차량 사망 소식을 전하고는 맨손으로 산행을 이어갈 수 밖에 없었습니다. (동행하는 차의 주행 모습만 봐도 즐겁기에...)
이후 귀가하여 정비를 해보고자 변속기를 떼어 확인해봅니다.
녹아내린 AM32 변속기의 그을린 기판 모습
측면에서 보면 가운데 칩부분 남땜이 아예 기판에서 떨어져있습니다.
혹시나 하고 다시 연결봤습니다.
그리고 3셀 배터리를 연결하니 띠리릭 소리와 함께 정상적으로 작동을 합니다. 어라??
뭐지 싶어 조종기로 조작을 해니까 초저속 스로틀에서는 모터가 반응을 하지 않네요 적당히 스로틀을 당기니 그때서야 제대로 모터가 회전하면서 차가 앞으로 전진합니다.
스티어링은 영향없으니 문제는 없구요
뭐지 싶어 좀더 테스트를 해봤는데 초저속주행이 안되서 이대로는 도저히 산행을 할 수 없다로 결론. 그렇기에 이 변속기는 생명을 다한것으로 사망판정을 내립니다.
아마도 기판 전체에 데미지가 먹은건 아닌것 같구요 저속 가변을 담당하는 FET 칩쪽이 떨어지면서 문제가 되는것 같아보입니다.
원인을 고민해봅니다.
이유가 뭘까?
무리한 모터 고출력이 있었던것도 아니고, 그렇다고 바위를 비비던 도중도 아니고 다른사람과 대화를 하던 중이어서 평지에 가만히 멈춰있던 차량이었고,
여태 여러번의 산행을 해왔으므로 배선의 합선도 문제없었고, 변속기+BEC+배선들을 하나로 뭉쳐 케이블타이로 묶어두었지만 묶여있다해서 발열에도 크게 문제는 없었고, 3셀을 쓰다가 4셀을 쓴게 기존 주행과는 차이점이라면 차이점인데 이게 변속기 기판에 적혀있듯 3 ~ 6셀까지 가능하다는점과 이미 4셀로 잠깐이지만 정상동작하는걸 확인했던터라 더욱 이해가 가질 않는 상황입니다.
의심이라면 4셀로 잠깐의 시간이 아닌 약 10여분 이상의 시간이 흘렀을 던 점이 영향을 주지 않았을까 싶기도 합니다.
당시 상황을 떠올려보면 급히 배터리를 제거하고 난 후 변속기를 살펴보니 기판이 상당히 뜨거웠었고, 그 열기로 인해 붙어있던 JST 커넥터가 그 열기에 녹아 들어 타는듯한 냄새를 유발시키는 것이었습니다.
플라스틱 커넥터가 녹았다는건 그만큼 열이 발생했다는건데 그동안 없던 발열이 났다는건 결국 배터리의 높아진 전압을 변속기가 감당하지 못했던게 아닐까 의심이 드는 상황입니다. 그러면 왜 기판에는 왜 3 ~6S 라고 적혀있는건지...
같이 산행하는 분중에서도 AM32 변속기를 쓰시는 분도 있고, 이분도 4셀로 주행을 하고 있기에 4셀을 사용함으로 변속기가 타게 될줄은 전혀 예상치 못한 일이네요.
암페어의 차이로 인한건가 싶은 생각도 듭니다. 제가 사용하는 AM32변속기는 35A짜리로 그리 큰 전류를 가진 변속기는 아니나 LCG용으로는 충분하다는 결론에 35A짜리로 선택한건데... 70A짜리였으면 타지 않았을까요?
타버린 AM32 와 새로받은 AM32 그리고 문제의 4셀배터리
너무 감사하게도 동행하시는 형님분께서 안쓰는 AM32가 있다고 해서 그분 아지트에 들러 동일한 35A짜리 AM32를 전달받았습니다.
모터 커넥터도 따로 손볼필요없이 일치해서 바로 연결!
배터리 연결하고 테스트해보니 잘 작동하네요 초저속도 무리없이 잘 반응합니다.
AM32는 변속기에 셋팅되는 설정값과 사용하는 모터의 KV값이 일치해야 되기에 세부 설정하는 방법을 찾아내고 직접 셋팅해 보았습니다.
지금껏 540 모터 550모터 혹은 퓨전시리즈와 같은 모터의 외부가 감싸져서 내부에서 회전이 일어나는 모터를 주로 사용해왔는데, 이번엔 저속 락클롤링 차량에 적합한 아웃러너 일명 통돌이 모터를 사용해보려고 합니다.
여기서 적합하다는 의미는 고토크와 저회전의 이유도 있겠지만, 가장 큰 이유는 LCG 샷시가 기본적으로 아웃러너 모터에 기반하여 설계되었다는 점입니다. 샷시 제조사에서도 제품 설명란에 '아웃러너 모터 사용을 권장한다' 라고 명시하고 있고 차량을 빌드하면서 이건 일반적인 모터는 사용이 쉽지 않겠구나 생각하기도 했구요
그래서 공간제약 해소에 고토크와 저회전성 셋다 모두 만족할 수 있는 통돌이모터 + BEC + AM32 변속기 조합으로 구성을 해봤습니다.
AM32 ESC(변속기) 입니다.
드론용으로 사용되는 AM32 변속기를 펌웨어 업그레이드를 통해 차량에도 사용할 수 있고, 그에 따른 각종 셋팅과 모터 회전수까지 프로그래밍 된 ESC로 보시면 되겠습니다.
사실 AM32 이외에도 선택할 수 있는 변속기가 몇개 더 있긴했는데, 가격은 큰 차이가 나지만 성능은 그렇지 못하다는 평이 많아 고민끝에 AM32로 선택하였습니다.
또 AM32중에서도 70A, 40A, 35A등 암페어 수치가 다 다른데 35A로도 락클에는 부족함이 없다하여 35A로 최종 낙찰.
구매는 장터에서 모든 작업을 거쳐 판매하시는 분이 계셔서 구분께 구매했구요
AM32 기판을 사서 직접 처음부터 다 손수 제작 해보려다가 기판에 각종 케이블과 연결단자, 납땜, 펌웨어 업글을 위한 아두이노, 아두이노 셋팅, PC 프로그램 및 셋팅 등등 시간과 비용이 구매하는것보다 더 들것 같은 결론에 완제품을 구매하게 되었습니다.
※ BEC 케이스를 열때 같이 동봉되어있는 파란색 점퍼를 잘 확인해야 합니다. 꼭 필요한 녀석인데 크기가 굉장히 작아서 분실하기 쉽습니다.
BEC에 동봉되어있는 메뉴얼을 살펴봅니다. 대충 싸악 훑어주고~
전체적인 연결은 아래 사진 참고하였습니다.
AM32 변속기 / 통돌이 모터 / U-BEC 연결방법은 다음과 같습니다.
1. 변속기와 모터를 3가닥 연결선으로 연결한다.
2. 변속기에서 나온 jst 연결케이블을 BEC 전원케이블과 연결한다(납땜)
3. 변속기에서 나온 수신기 연결단자를 수신기 스로틀(TH)에 연결한다. - 일반적인 조종기로부터 스로틀의 신호를 변속기에 전달 위함 - 보통의 수신기 연결 케이블일경우 3개 선으로 구성되어 있지만 AM32 변속기에서 나온 연결케이블은 신호선과 검정색 -선만 존재 - 빨강색 +선까지 연결하면 과전압으로 수신기가 망가질 수 있음(BEC 매뉴얼에도 이부분 표기)
변속기에서 나오는 수신기 연결케이블에 적색 + 연결선이 없다
4. BEC에 파란색 점퍼를 7.4V에 맞도록 연결한다.
5. BEC에서 나온 수신기 연결단자를 수신기의 빈 슬롯에 연결한다. - BEC 전원 연결용 - 빨간색 +선과 검정색 -선만 존재
전체적인 모습은 이렇습니다.
이제
모든 선을 연결 하고 배터리의 XT60 전원을 인가합니다.
곧바로 모터에서 띠.리.릭 비프음 소리가 납니다.
잘되는가 싶어 기다려봤지만, 역시나 반복되는 비프음.
뭔가 문제가 있구나 싶어 여기저기 해결방법을 찾아봅니다.
. . .
원인을 찾았습니다.
사용하고자 하는 송/수신기는 SANWA(산와)의 MT-4
원인은 산와 구형 송신기의 경우 기본 스로틀 타입 설정에 전진/후진 동작비율이 7:3 으로 기본 설정되어있다는겁니다.
지금이야 거의 대부분의 차량이 배터리로 구동되었지만, 예전에는 기름을 먹여 구동시키는 엔진모터가 대부분이었기에
후진스로틀이 후진이 아닌 브레이킹 역할을 하는 시대였고, 그 차량에 맞도록 7:3이라는 비율이 기본으로 탑재되었던 것입니다.
브랜드 변속기의 경우는 이 중립값을 자체적으로 보정해 5:5로 맞추고 동작하여 아무런 설정변경없이 써왔으나
AM32 변속기를 사용하다 보니 이런게 있다는것도 처음 알게 되었습니다.
MT-4 메뉴얼을 뒤져 설정하는 방법을 찾습니다.
SYSTEM 메뉴에 들어가서 [06.TH TYPE] 에 들어가보니 역시 예상대로 70:30으로 잡혀있습니다. 바로 50:50 으로 잡아주고(두가지 선택만 가능) 저장!
셋팅 바꿨으니 다시 배터리 연결하니 띠리릭 후 띠릭 소리가 나고 더이상 비프음이 나질 않습니다.