SCX24 빌드1편(섀시) 은 여기서 → https://kernzeroid.tistory.com/285
SCX24 빌드2편(엑슬&쇽) 은 여기서 → https://kernzeroid.tistory.com/286
SCX24 빌드3편(기자재) 은 여기서 → https://kernzeroid.tistory.com/290
SCX24 빌드4편(구동계) 은 여기서 → https://kernzeroid.tistory.com/293
SCX24 빌드5편(휠타이어) 은 여기로 → https://kernzeroid.tistory.com/291
SCX24 빌드6편(바디 도색) 은 여기로 → https://kernzeroid.tistory.com/292
SCX24 업글1편(마운트 / 거치대 / 플레이트) 은 여기로 → https://kernzeroid.tistory.com/298
컨제입니다.
scx24 빌드 후 여러 주행테스트 및 수정 변경점에 대해 여러 고민을 하고 있습니다.
그중
가장 제일 먼저 변경하고 싶었던것 중 하나인 서보.
빌드 당시 구매한게 아닌 보유중이었던 서보를 그냥 장착해서 사용했었는데요

이 서보때문에 고민을 적잖이 많이 하긴 했습니다.
동봉 되어있던 서보혼은 길이가 너무 짧아 사용불가능해서
좀더 긴 제품을 구매했더니, 이번엔 서보혼 이빨갯수(Teeth) 가 맞지 않아 사용불가능
그래서 결국 흰색 수지 서보혼을 사용했었는데
토크도 그렇고 마운트 거치 구멍도 맞지 않는 어정쩡함이 계속 불만이었다가
큰맘먹고 서보를 교체 해주기로 결정했습니다.

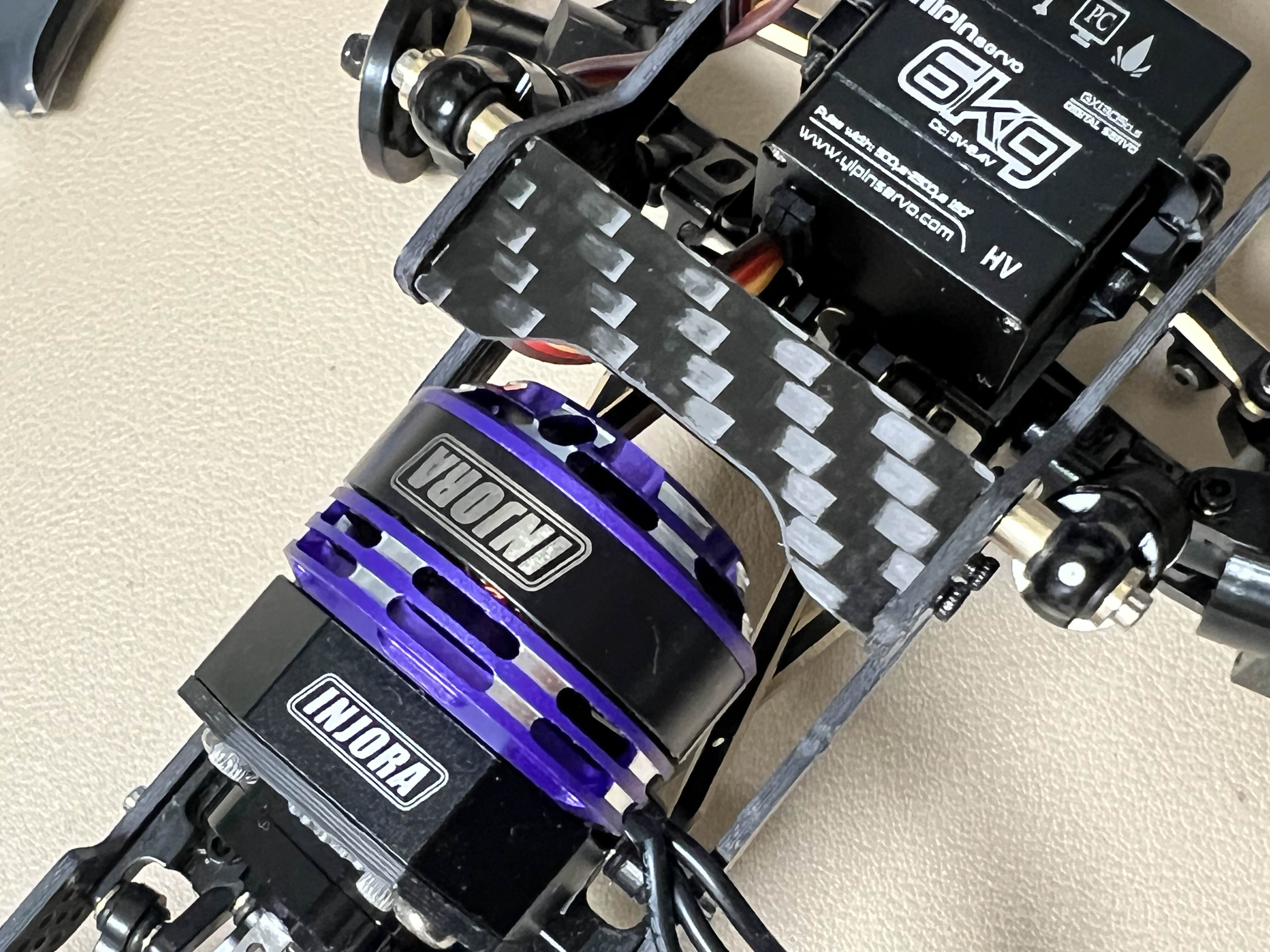
사실 위 6kg 서보는 1:10크기의 큰 차량에서 기어 변속을 하는 용도로 나온 제품이라
서보 마운트 구멍도 m3 구멍이 뚫려있거든요.
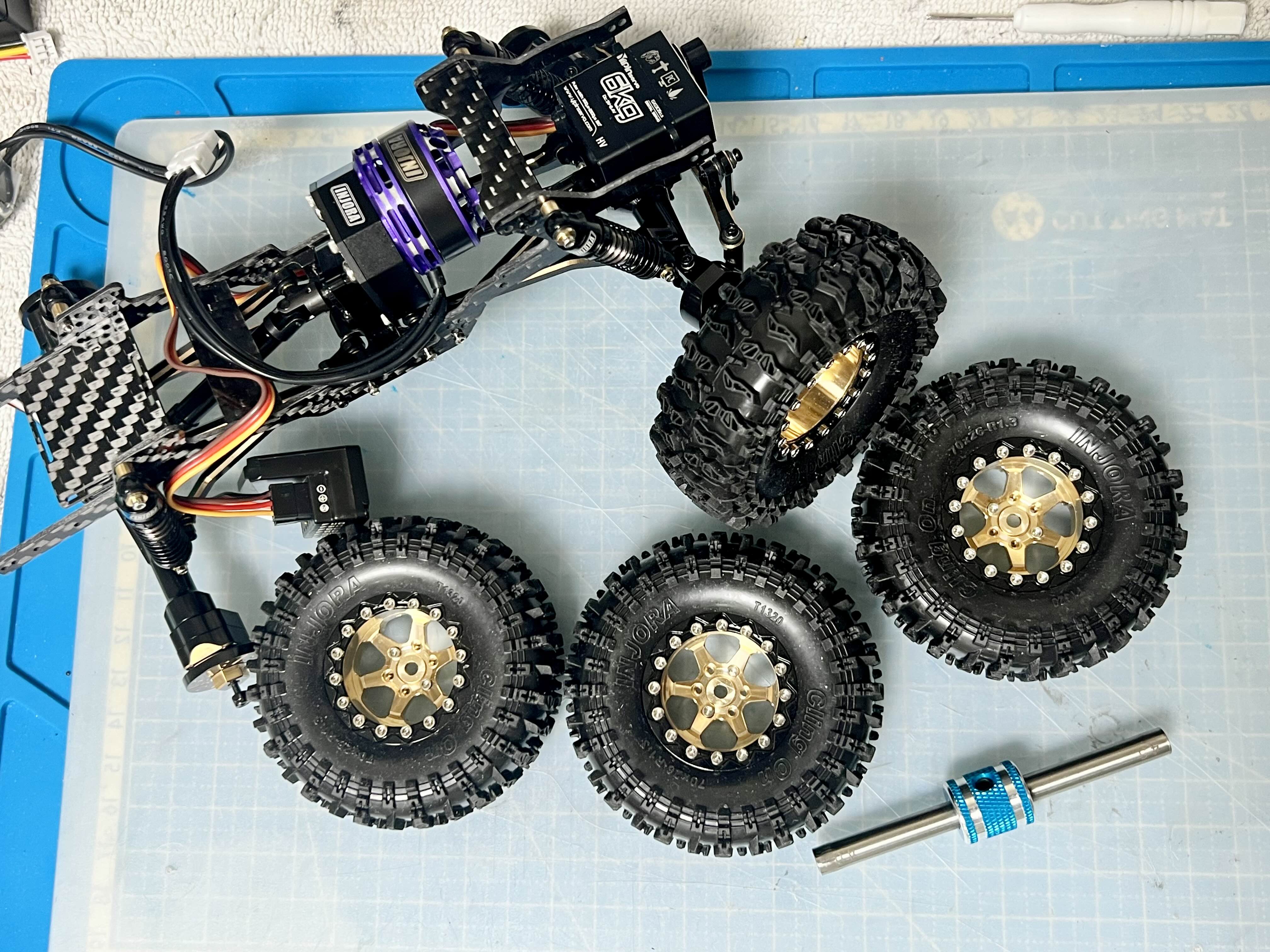
선택한 서보는
대십용 서보로 한번 큰 믿음 주었던 얀트리스 11kg 제품입니다.

고급지게 전용케이스에 담겨져 있습니다.
구성품은 서보와 메탈서보혼 1개, 수지서보혼 4개, 그리고 장착용 나사가 같이 들어있네요

기존 서보를 제거해야겠죠.
별 어려움없이 제거를 진행하고

새로운 서보로 교체를 진행합니다.
힘의 차이가 생겨서 인지 서보의 크기가 좀더 큽니다.

잘 서보마운트에 위치 시켜주고
m2나사로 고정해줍니다.

같이 동봉되어 있던 서보혼도 잘 고정시켜줍니다.

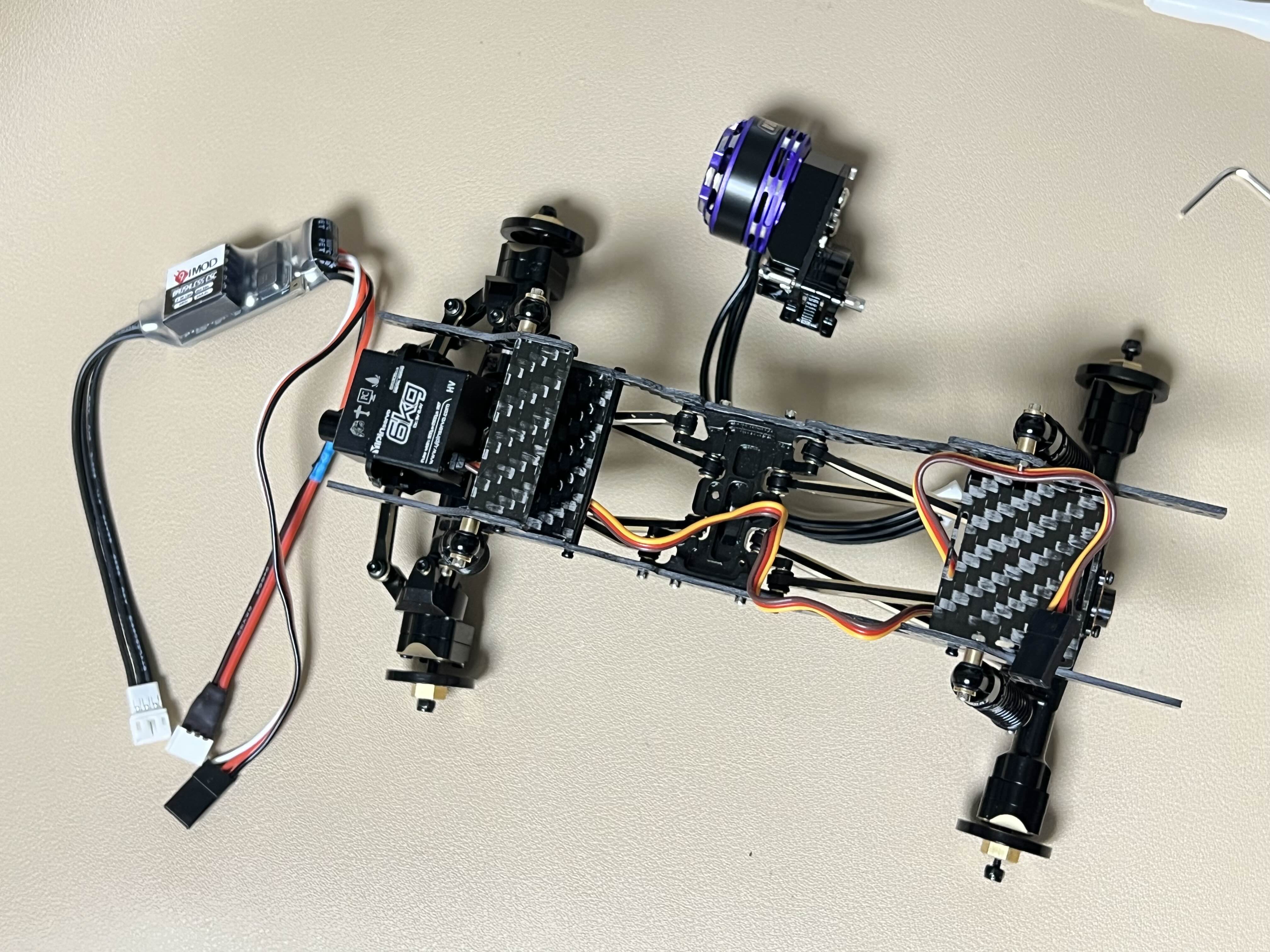
배선들 지저분하지 않게 정리해주고
마무리

완성되었습니다.
esc마운트 자리에 배터리가 쏙 들어가서 그대로 부착해주었고
우측에 esc
좌측에 수신기가 위치합니다.

서보 힘도 좋으니 반응성이 굉장히 빨라져서 대 만족입니다.
조종기 스티어링의 미세한 움직임을 즉각 그대로 반응하는 상당히 마음에 드네요
트라이얼은 서보힘으로 험로를 주파한다 라는 말이 있듯
서보의 파워 증량을 위해 서보교체를 진행해 보았습니다.
.
.
.
근데
또 이거에 적응하면
좀더 강략한 토크를 원하게 될수 있을 것 같습니다
지금 교체한 서보의 최대 토크가 11kg까지 가능인데 그건 7v급 이상의 전력이 공급되어야 가능한 토크수치이고
지금은 수신기의 5v대 토크이니 11kg급 까진 아닐꺼고
더 높은 토크는 BEC 장치를 추가로 장착해야 나올수 있기에
추후에 필요시 추가로 장착해 보도록 하겠습니다ㅋ
이상 scx24 서보 교체기를 마칩니다
- 끗 -
'RC_Car > [Micro RC] SCX24 빌드' 카테고리의 다른 글
| [scx24] 업글 1편 - 배터리 마운트 / ESC 거치대 / 사이드 플레이트 (0) | 2026.05.14 |
|---|---|
| [scx24] 빌드 6편 - 바디 도색(Body Paint) (0) | 2026.04.28 |
| [SCX24] 빌드 5편 - 휠타이어(Wheel & Tire) (0) | 2026.04.28 |
| [SCX24] 빌드 4편 - 구동계(Transmission & Drive-shaft) (0) | 2026.04.23 |
| [scx34] 빌드 3편 - 기자재 부분(Main Equipment) (0) | 2026.04.22 |