컨제입니다.
차량 바디의 디테일감을 올려주는 아이템중 하나인 머플러 (일명 마후라)를 구매했습니다.
https://a.aliexpress.com/_opYg5IT
US $2.30 | 1:10 RC 자동차 배기 파이프 금속 테일 스로트, 1/10 드리프트 자동차 모델 액세서리, 인기 1
US $2.30 | 1:10 RC 자동차 배기 파이프 금속 테일 스로트, 1/10 드리프트 자동차 모델 액세서리, 인기 1 개
star.aliexpress.com
배기파이프로 검색하면 나오는데 1구와 2구 두가지 버전이 있는데 둘디 필요해서 각각 2개씩 구매해봤습니다.
배송되어 보니 머플러와 빨간색 LED, 장착시 사용할 볼트너트가 들어있습니다.

그런데
그냥 은색의 금속느낌에 뭔가 아쉽습니다.
그래서 좀더 디테일함을 업그레이드 시키기 위해 가스 토치를 준비했습니다.
before 작업전 사진입니다.

after 조치 후 사진입니다.
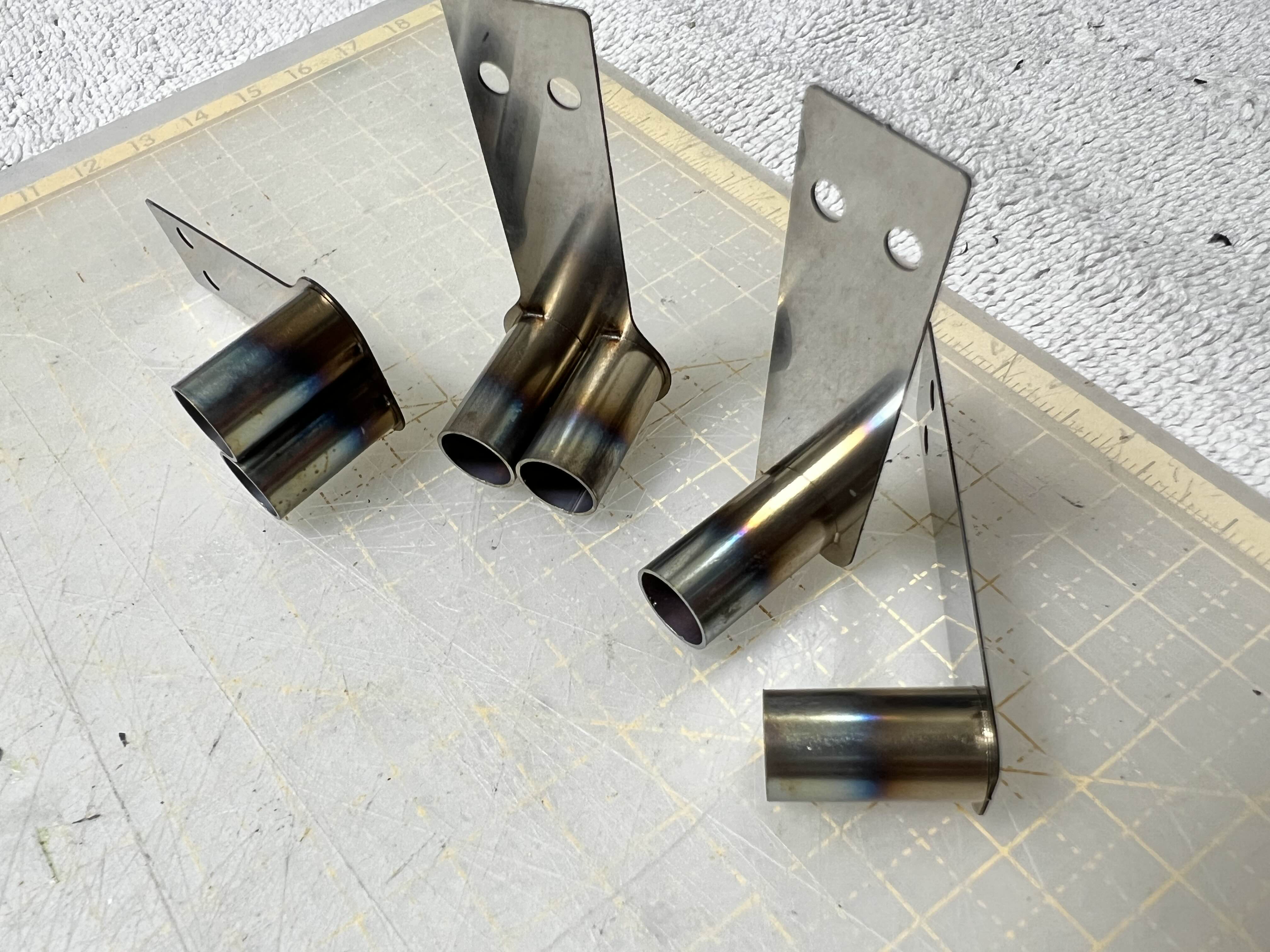
단지 가스 토치로 끝부분만 뻘겋게 달궈주면 실제 머플러처럼 그을린 흔적이 남아 디테일을 올릴 수 있습니다.
이제 led를 달고 그 led를 깜빡거리게 해줄 모듈을 달아서 백파이어 배기 파이브를 완성시킵니다.
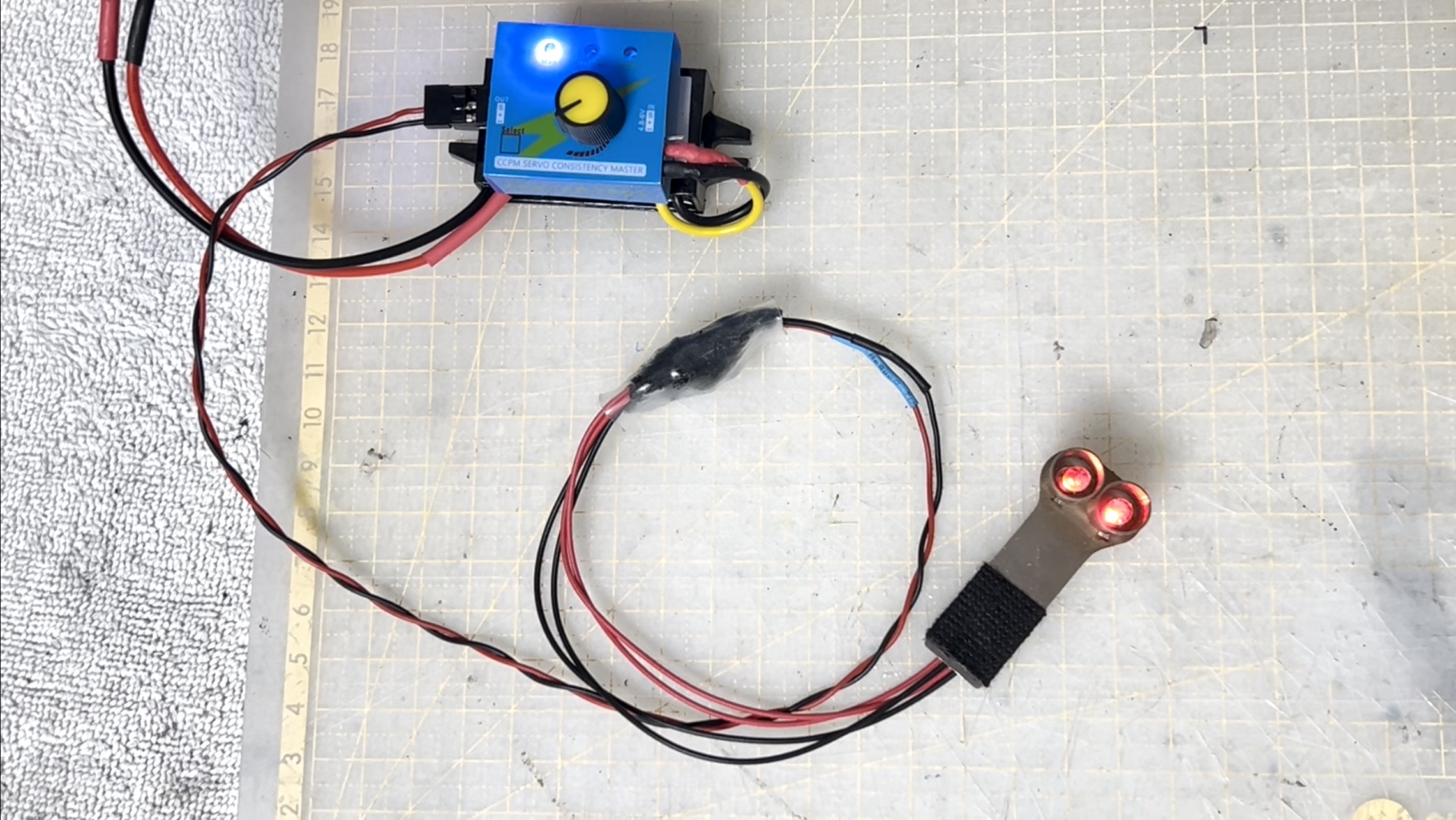
모듈제작은 여기로..
[RC 백파이어] 머플러 LED 깜빡이 모듈 제작 응용편 - https://kernzeroid.tistory.com/m/187
[RC 백파이어] 머플러 LED 깜빡이 모듈 제작 응용편
컨제입니다. IC칩을 이용해 백파이어에 사용할 번쩍거리는 led를 구현해보았습니다. 유튜브 영상도 찾아보고손으로 도면도 그려보고 우선 가장 중요한 NE555 IC칩에 대해 자료를 찾아봅니다.
kernzeroid.tistory.com
마지막 바디에 슈구나 E6000으로 붙여주면 멋진 차량의 궁둥짝이 되겠습니다ㅋㅋ
이상입니다.
- 끗 -
'RC_Car > RC 드리프트(Drift)' 카테고리의 다른 글
| 국민자이로 V4 Drift Gyro (DP-302) 셋팅법 (0) | 2024.08.26 |
|---|---|
| 브론즈 하이브리드 - 베벨기어 손상 / 그리고 견적 (0) | 2024.08.25 |
| [RC드리프트] 전국 RC 드리프트 전용 서킷 정보 모음 (1) | 2023.07.28 |
| [드리프트 RC 대회] KDC 2023 참가하다 (1) | 2023.05.30 |
| 하이브리드 코너 웨이트 측정 후기 (1) | 2023.05.15 |