
컨제입니다.
휠베 225mm인 G4 차량에 올려줄 타미야 페라리 458 이탈리아 바디를 컷팅해서 완성시켰습니다.
https://kernzeroid.tistory.com/243
[바디제작] 페라리 458 바디 - 휠베 225mm 로 줄이기
컨제입니다. 최근 컨버전을 진행한 휠베 225mm 차체에 바디가 없는 상황입니다. 흔치않은 휠베이스 덕분에 사용할 수 있는 바디가 극히 제한적인데, 해외 직구를 통해 폭이 190이면서 휠베가 225
kernzeroid.tistory.com
하지만,
이 바디는 상당히 파손이 심각한 바디로 리어가 아래 사진처럼 깨져서 떨어진 파츠도 보관중이지가 않고,
또 개인적으로 458의 프론트는 너무 이쁘다 생각되지만 후면 디자인이 딱히 마음에 들지 않다는 생각을 가지고 있었습니다.
프론트 역시 깨져있지만 에폭시본드로 나름 본딩은 되어 형태를 유지는 하고 있는 상황.

이걸 어떻게 이쁘게 꾸밀 수 있을까 고민하면서
실차인 페라리 458 을 검색하며 이런 처런 모양의 튜닝된 차량을 구경합니다.
그러다 눈에 확 띄는 차 한대!!!
오우!!

측면에서 봐도 포스가 지립니다.
폴리바디의 깨진 부분까지 커버할 수 있는 디자인에 블랙 카본파츠가 주는 리어의 포스가 너무 마음에 드는군요.

고민없이 퓨전360 프로그램을 켭니다.
그리고 자로 바디 길이를 재고 높이를 재고 전체 크기를 정한다음
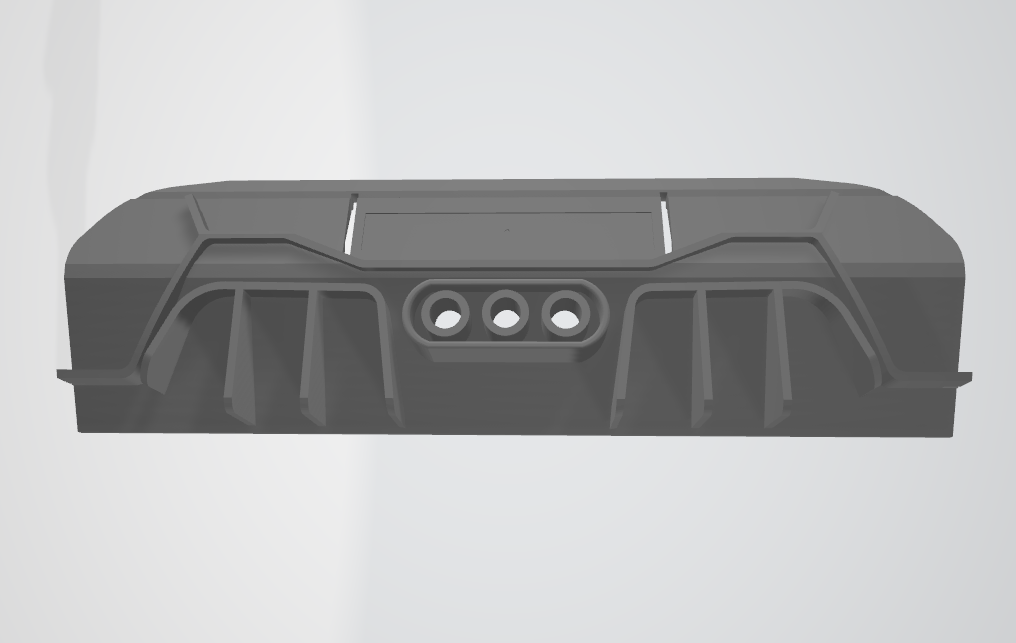
스윽스윽 디퓨저와 머플러등을 구현해줍니다.
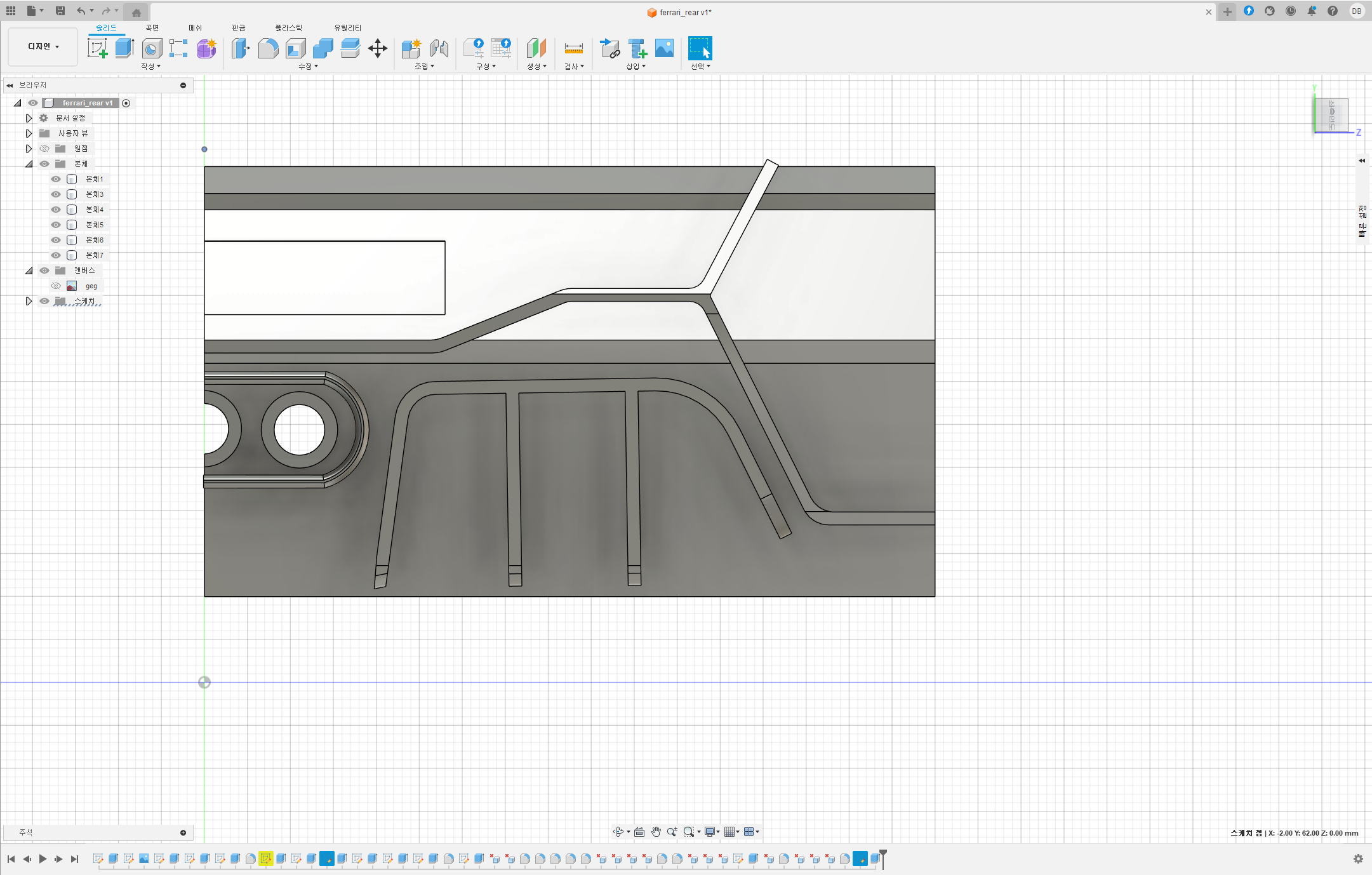
일단 이렇게 각진 모양으로 1차 나왔고,
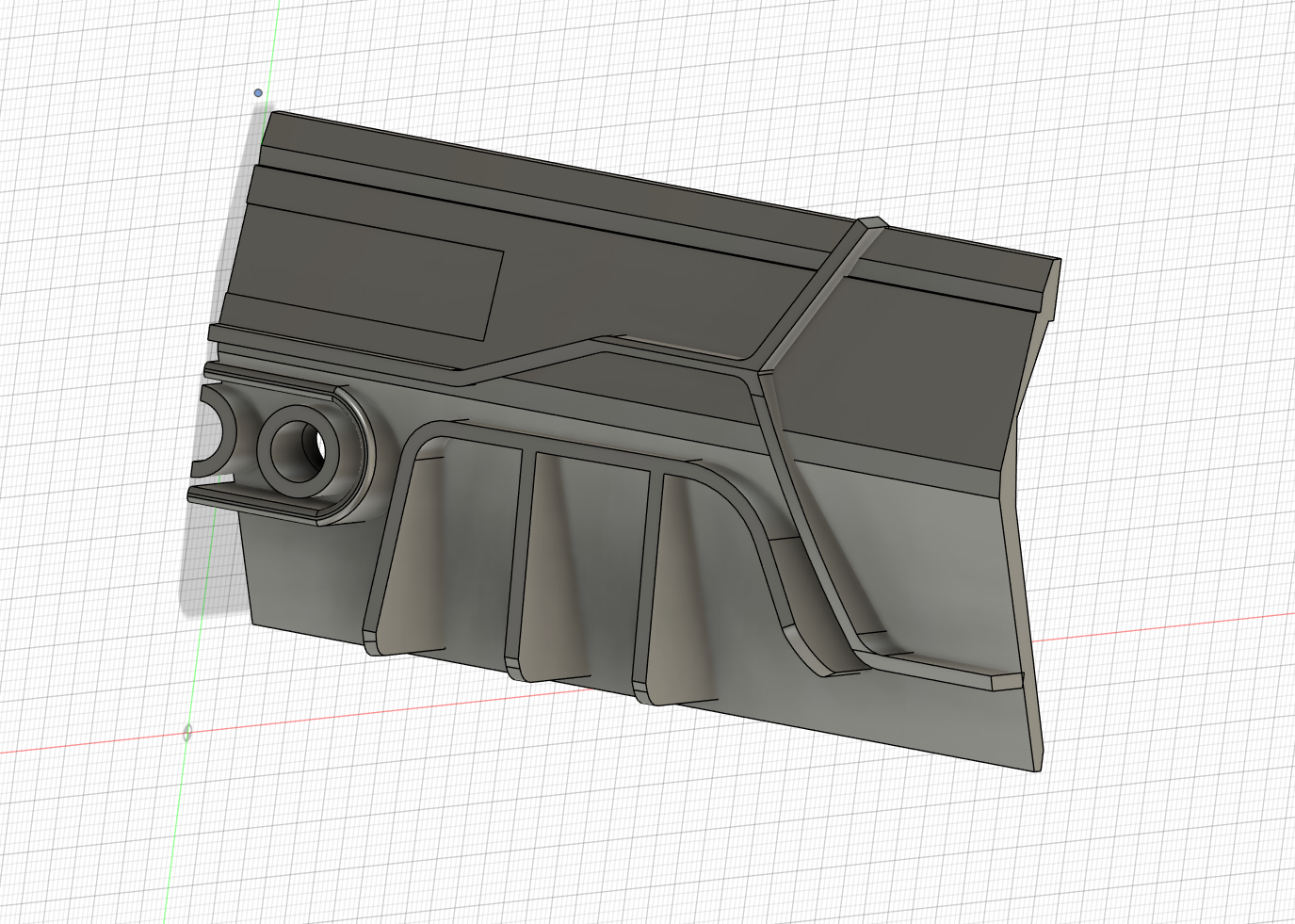
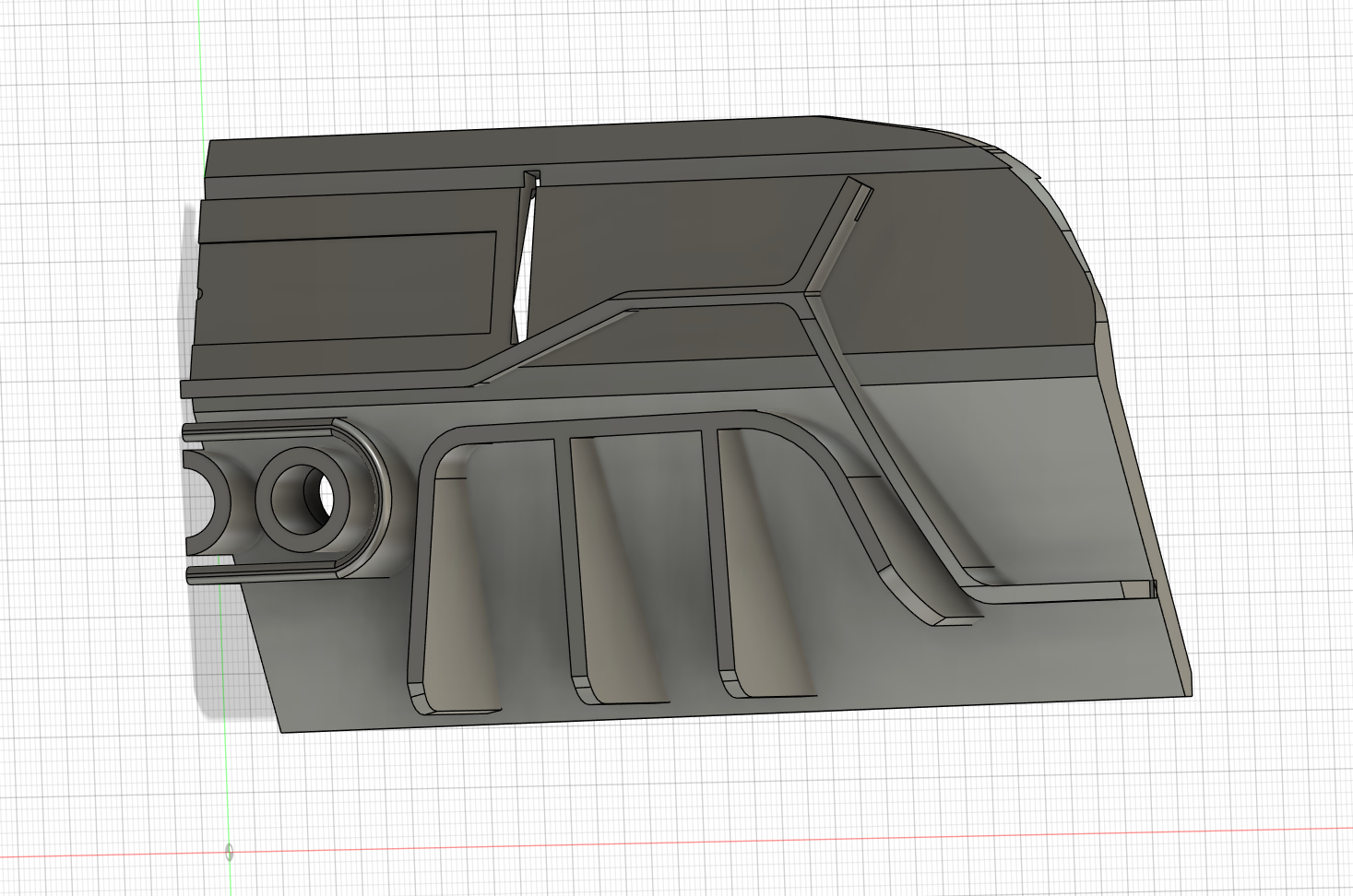
좀더 수정해서 각진 부분을 깍아주고
리어윙을 달 수 있게 구멍도 뚫어주었습니다.
반쪽만 모델링 했기에
미러기능으로 거울처럼 반쪽을 추가해 붙여주고
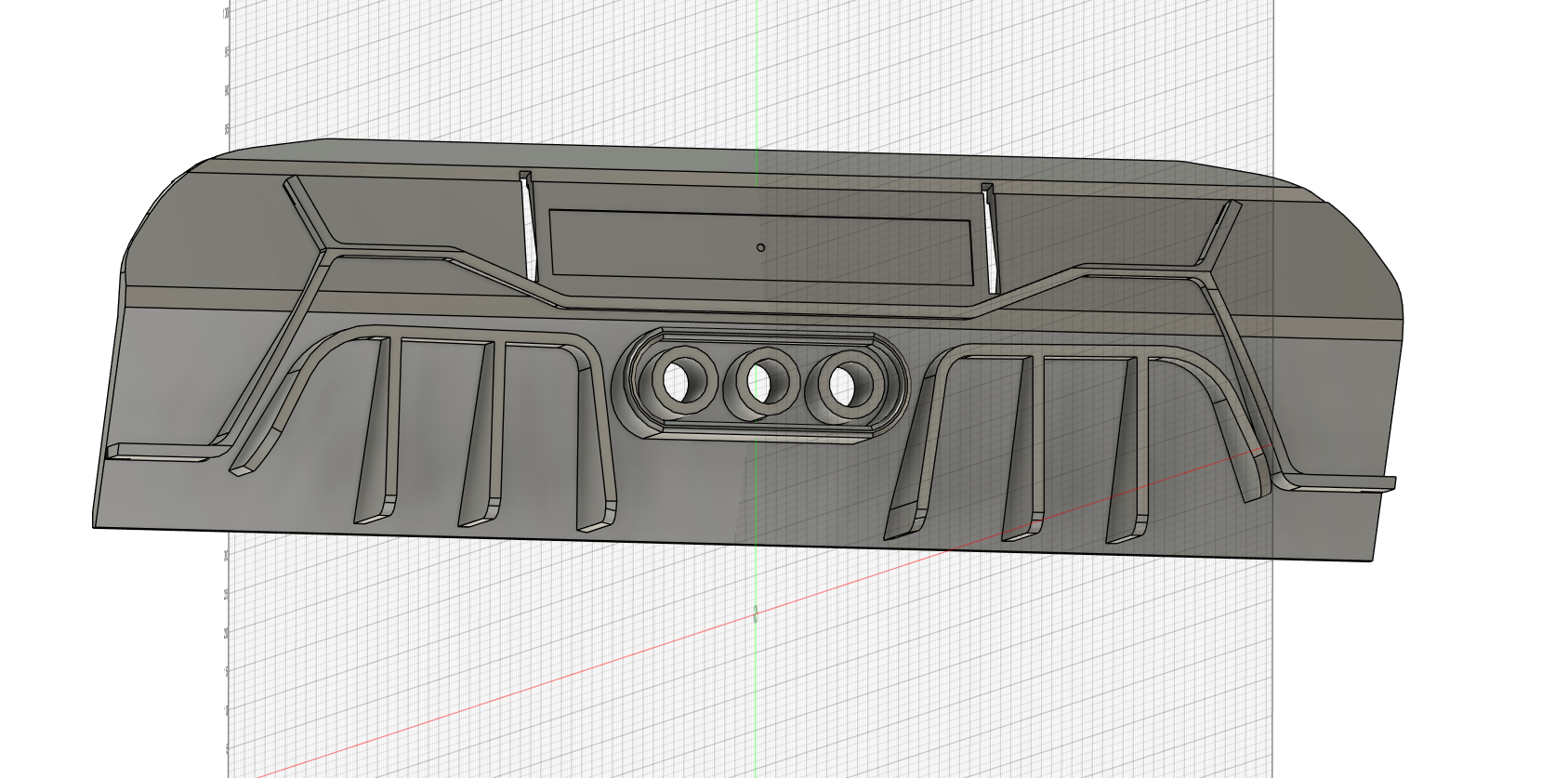
저장해서 최종 완성시킵니다.
뱀부랩 슬라이서로 가져가서 슬라이싱 한다음
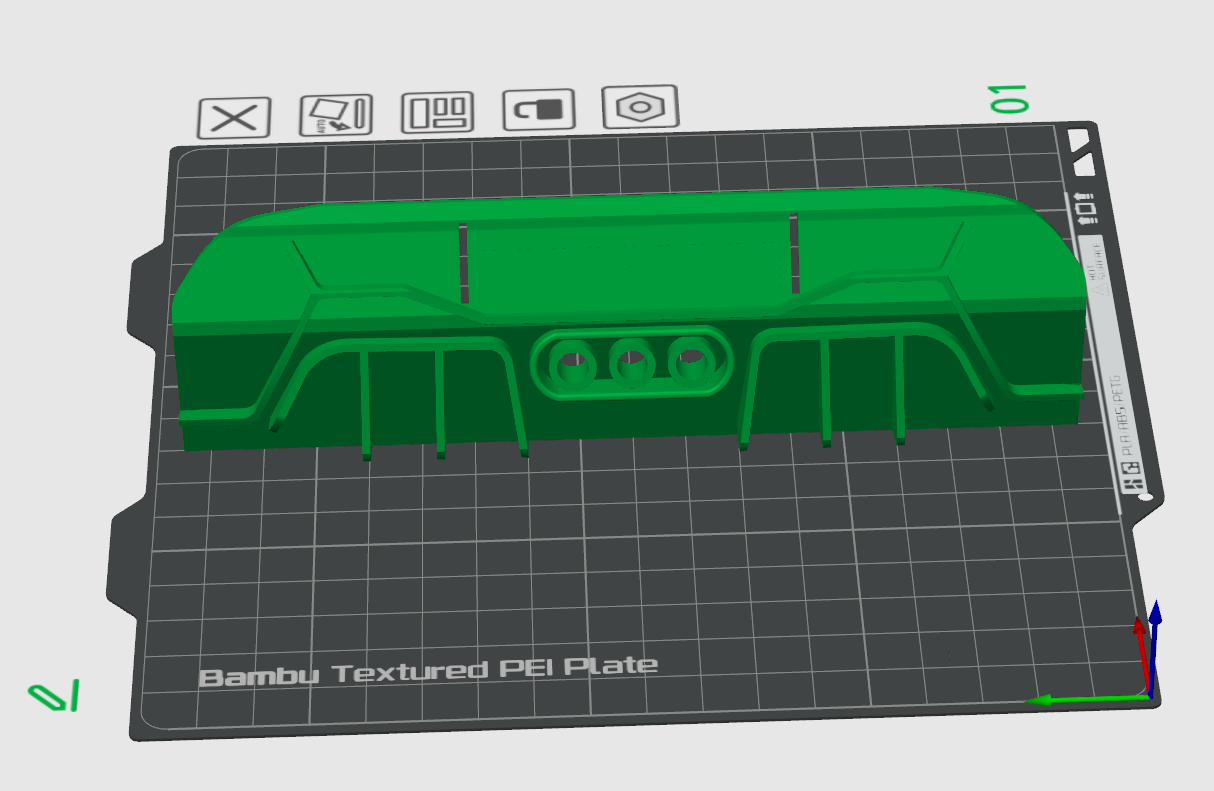
트리형 서보터도 달아주고
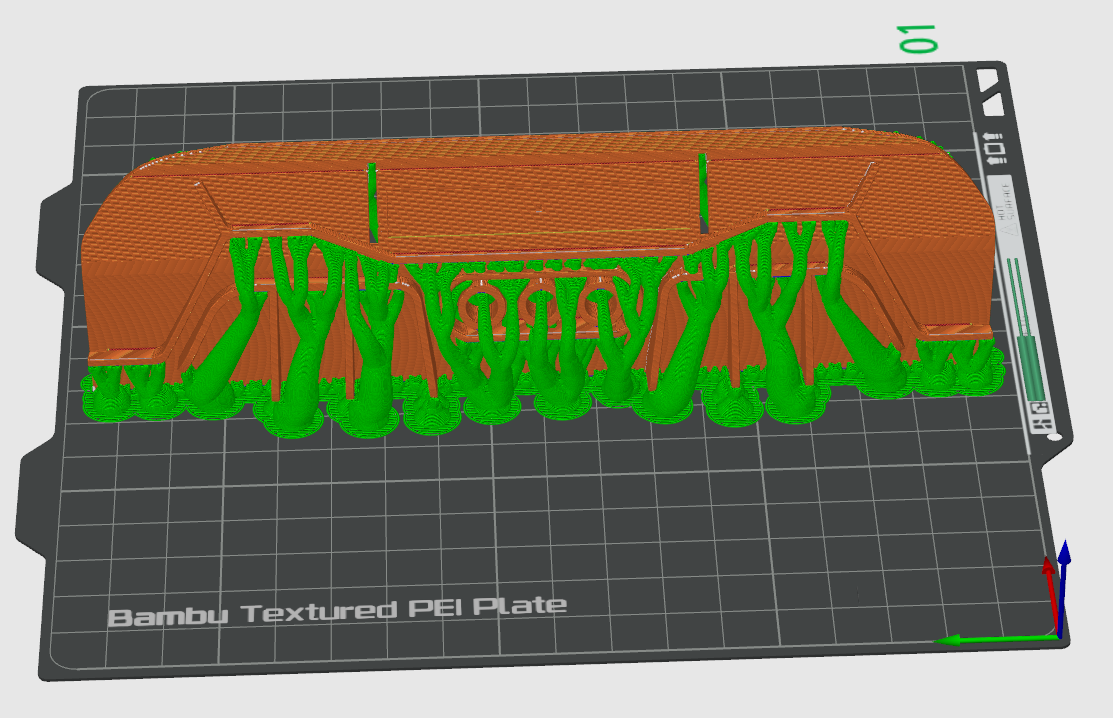
A1 mini 에게 출력을 맞기니 약 2시간만에 완성시켜 주었습니다.
출력재료는 PLA+
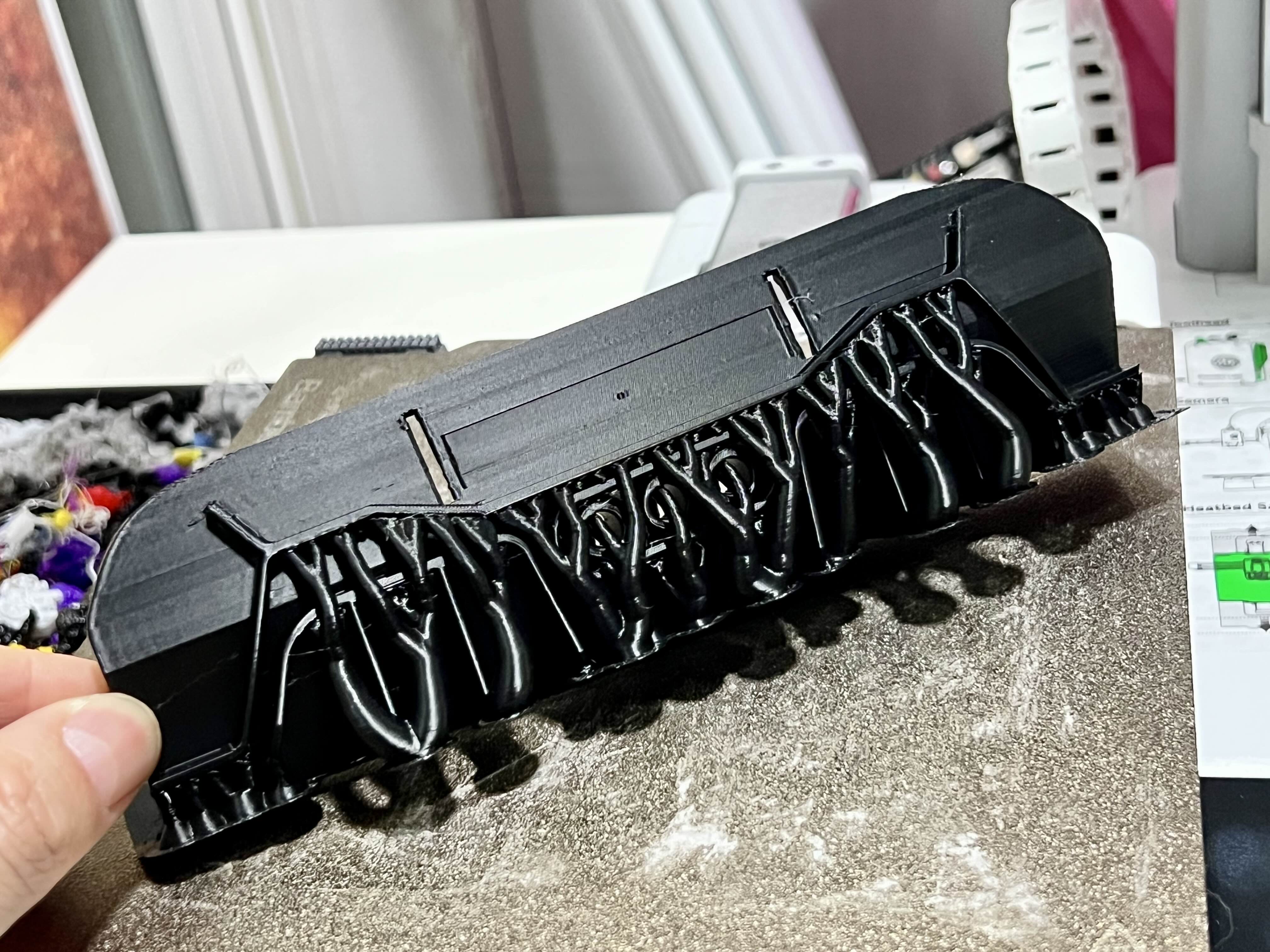
서포터를 제거하니 당당히 모습을 드러낸 리어 디퓨져

너무 평평하게 일자로 모델링한 상태라서 바디의 굴곡이 필요해보여
약간의 열을 가미해 전체적으로 살짝 둥글게 굴곡을 넣어줍니다.
바디를 적당히 알맞게 컷팅하고
완성시킨 리어 디퓨져

역시 E6000 에폭시 본드로 안쪽에 듬뿍 발라 단단히 고정시켜 주었습니다.
휠베 225 G4에 피팅한 모습

밋밋한 뒷부분에 윙을 달아주고자 합니다.
윙 마운트는 기존에 자작해둔 마운트를 사용합니다.
https://kernzeroid.tistory.com/97
[자작DIY] 리어윙(Rear Wing) 긴 버전(Long) 제작기
컨제입니다 최근 GT-R 바디 도색을 완료하고, 이후 외관에 실차감을 줄수 있는 악세서리를 장착하는 과정중 차량 리어 부분에 달아줄 윙을 달아주려고 각을 재보는데 번들로 같이 딸려온 플라스
kernzeroid.tistory.com
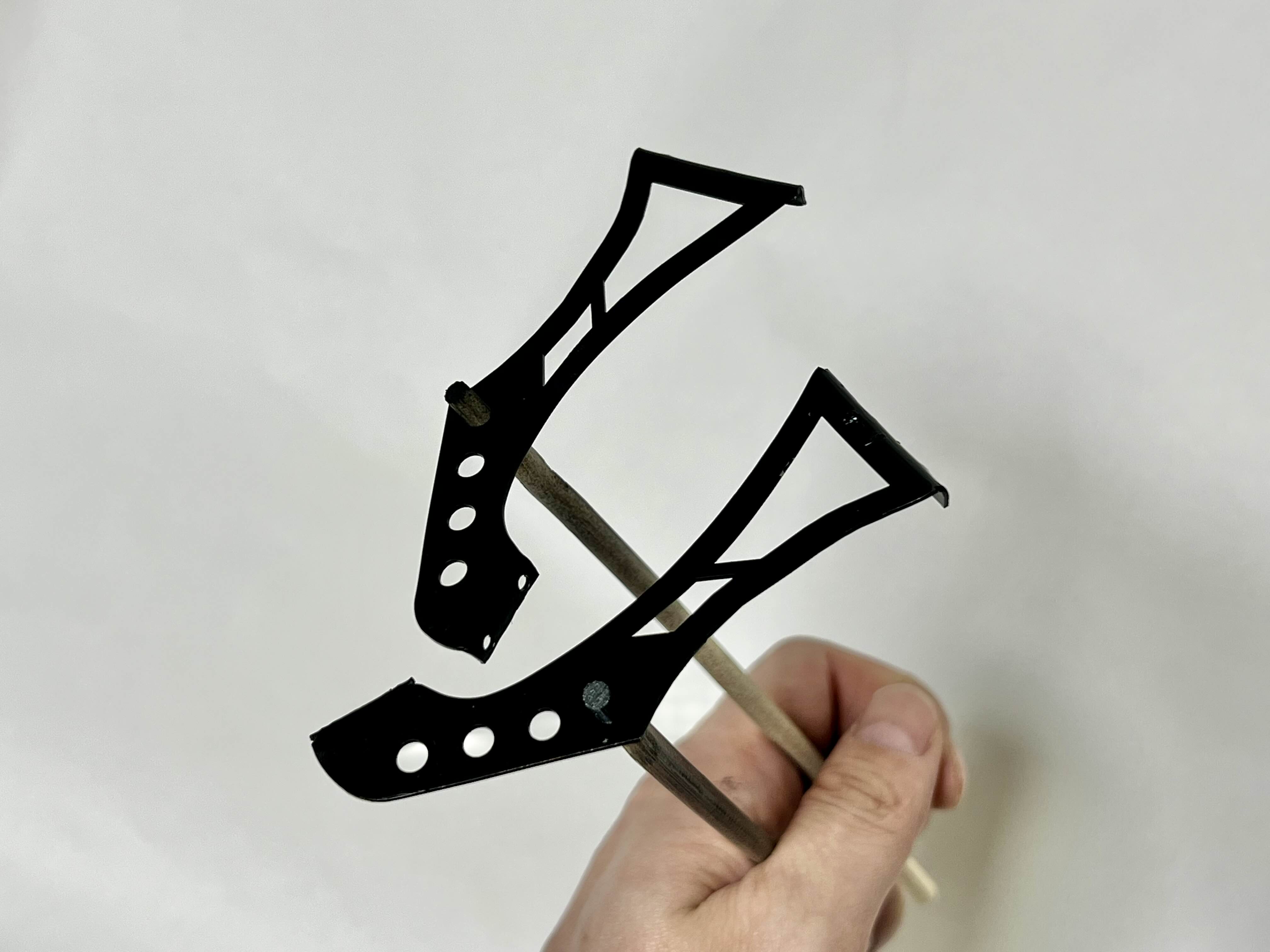
이번엔 광메탈 색이 아닌 디퓨저와 같은 검정색으로 가기 위해 스프레이로 간단히 도색을 해주었습니다.
나무젓가락에 꼽아 슥슥 도색완료.
모델링시 염두해둔 윙마운트 구멍에 하나씩 꼽아주고 에폭시본드로 본딩!

마지막으로 윙을 달아줍니다.

깨지고 엉망이던 458 바디의 리어가 말끔히 다시 태어난것 같아
나름 마음에 드는 작업이었던것 같습니다.
(사실 막바디여서 실패시 버린다는 생각이었는데, 오히려 이 생각이 압박없이 자유롭게 작업할 수 있게 해준게 아닐까 싶습니다ㅎㅎ)
그리고
아무래도 출력 소재가 PLA이기에 외부 충격등에 의해 깨질 가능성도 있다고 보지만
그래도 주위를 감싸고 있는 폴리바디의 유연함으로 어느정도 커버되지 않을까 싶은 생각이 듭니다.
led등 마무리하고 225셋팅이 좀더 매진해봐야겠습니다.
이쁘게 페라리 바디도 완성시켰으니 G4여 잘 가주길~~~
이상 바디 튜닝기를 마칩니다.
- 끗 -
'RC_Car > RC 바디 제작기' 카테고리의 다른 글
| [3D Printer] AMG 63 GT Body Shell Make it! (0) | 2025.03.28 |
|---|---|
| [바디리빌드] 페라리 458 바디 - 휠베 225mm 로 줄이기 (0) | 2025.02.24 |
| [휠베이스 273] 닷지챌린저 바디 도색 (1) | 2024.11.17 |
| [PANDORA] 판도라 86 ZN6 바디 도색 - 2nd (1) | 2024.09.23 |
| [PANDORA] 판도라 86 ZN6 바디 도색 - 1st (0) | 2024.02.02 |



