3RONCO 조립기 3
기자재 테스트 및 기어박스 구동 테스트를 해보겠습니다
준비한 기자재를 나열해봅니다

- 조종기 : 기존에 랭글러에서 사용했던 산와 MT-4를 그대로 활용
- 수신기 : 산와 RX-461 - 서보 : 알리발 25kg 서보
- 변속기 : 엑시얼 scx10 정품 변속기 - 모터 : 엑시얼 scx10 정품 모터 35T
- 배터리 : 2셀 7.4v lipo 배터리
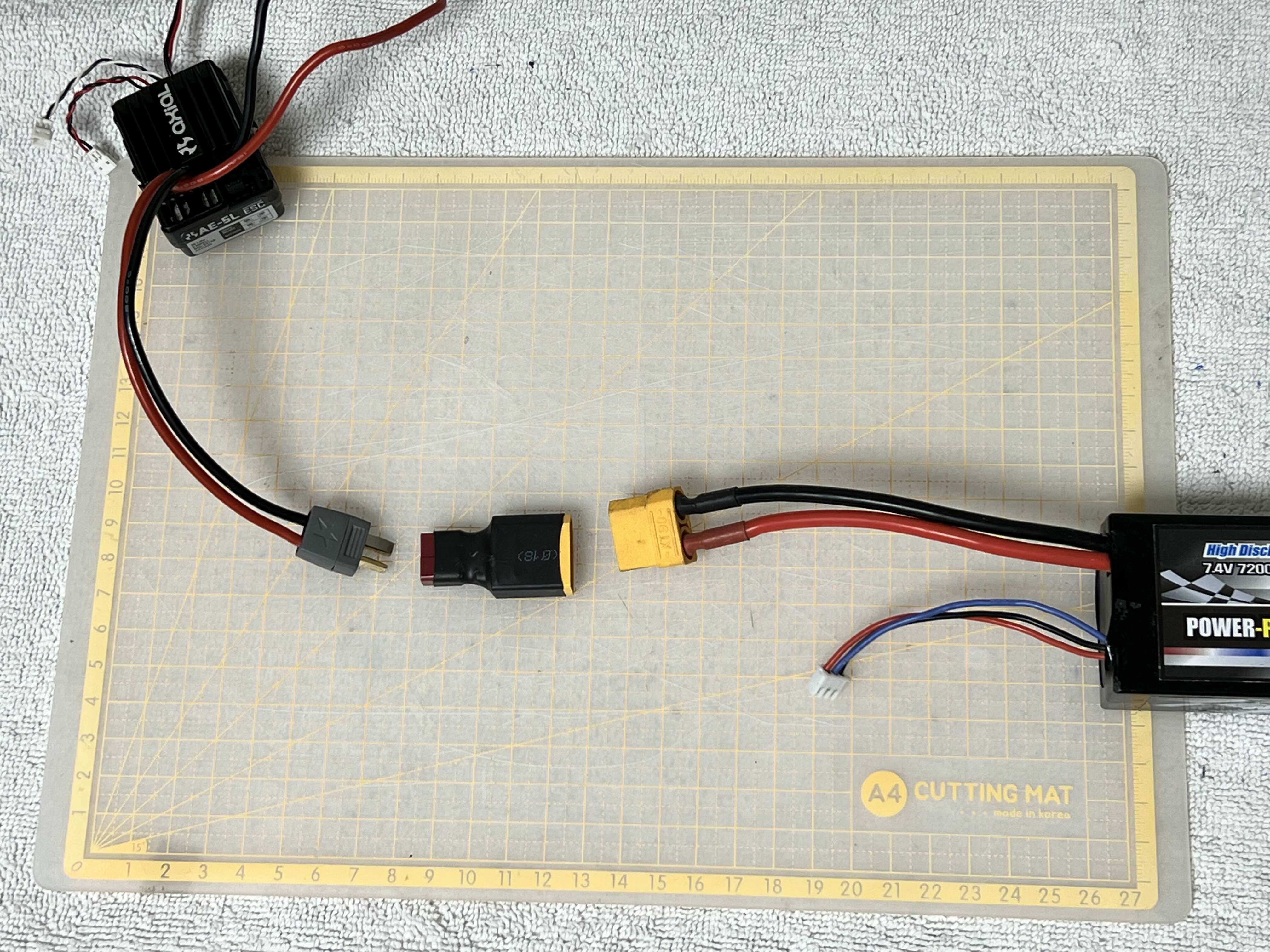
우선 변속기와 배터리를 연결해봅니다
엑시얼 scx10 정품 변속기의 전원연결 타입은 딘스네요
제가 가지고 있는 배터리는 xt90이므로 서로 타입을 연결해줄 변환젠더가 필요합니다
젠더 준비완료
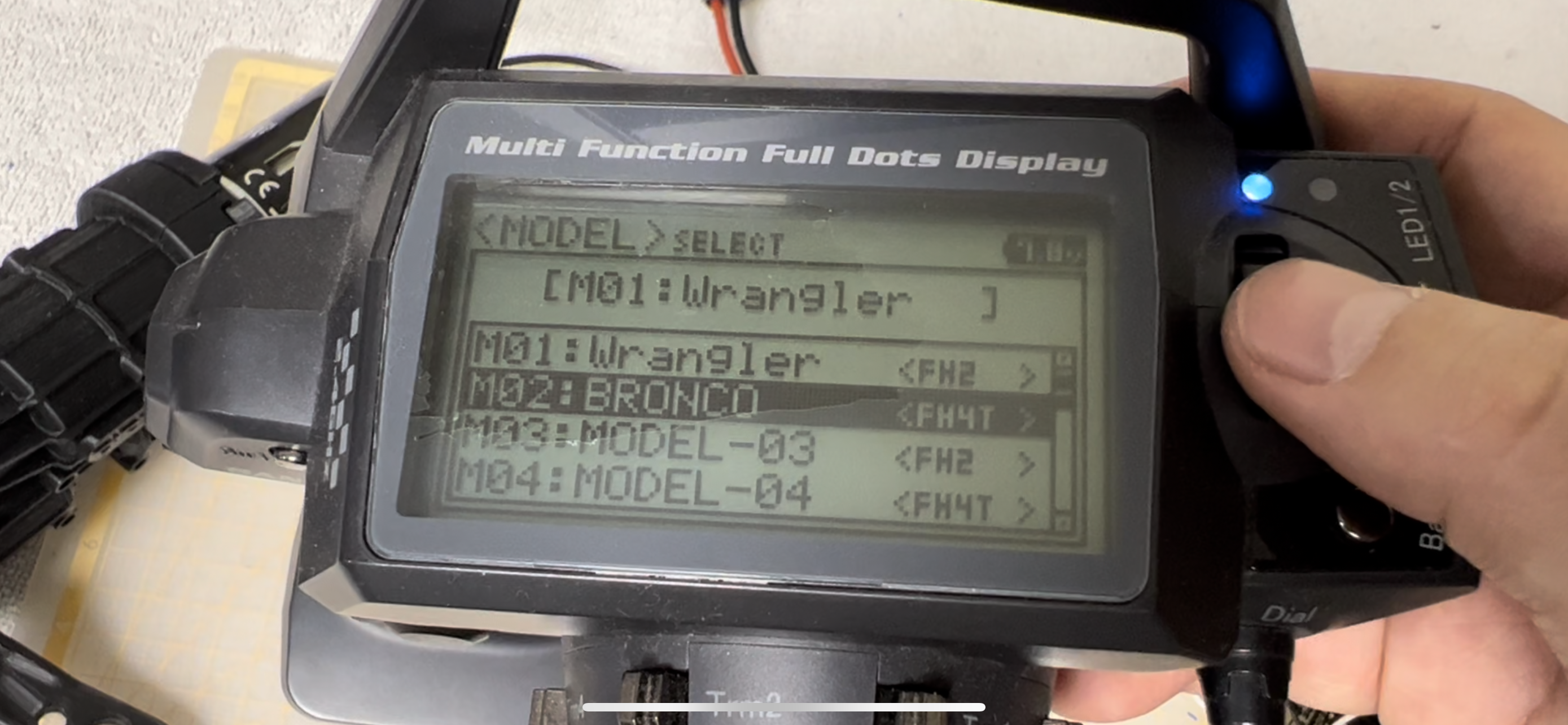
우선 조종기에서 기존 랭글러로 셋팅되어있는 선택항목을
비어있는 모델로 변경해주고
그 모델에 수신기를 바인딩 해줍니다
이제 수신기와 송신기를 짝지어줄 바인딩을 진행합니다
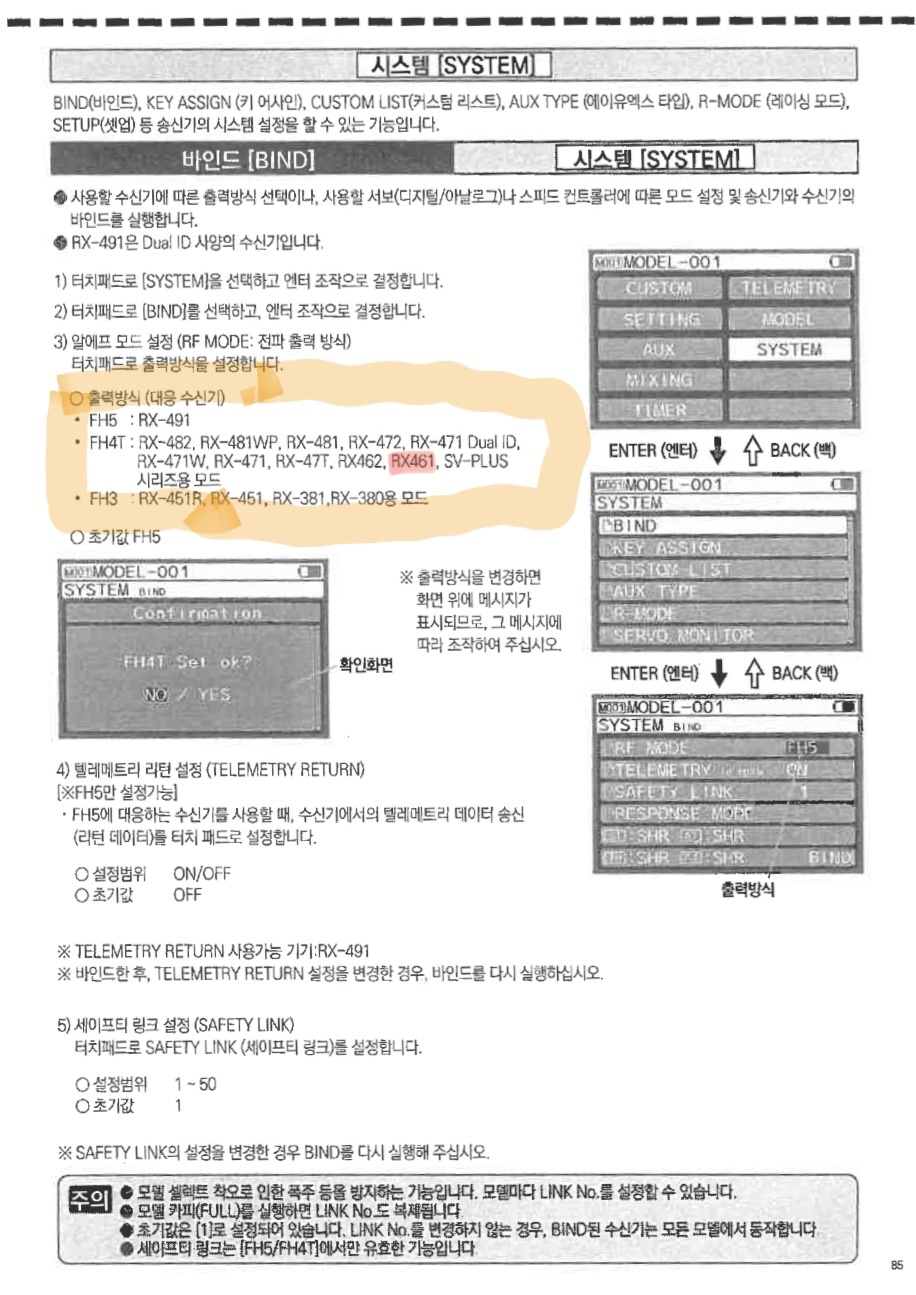
준비된 수신기 RX-461은 출력방식이 FH4T네요
조종기에서 FH4T로 설정 후 수신기의 바인드 버튼을 누른채로 전원을 연결하여 바인딩 해줍니다
바인딩 성공!
모터도 연결되어 있으니
장착한 기어박스도 테스트 해봅니다
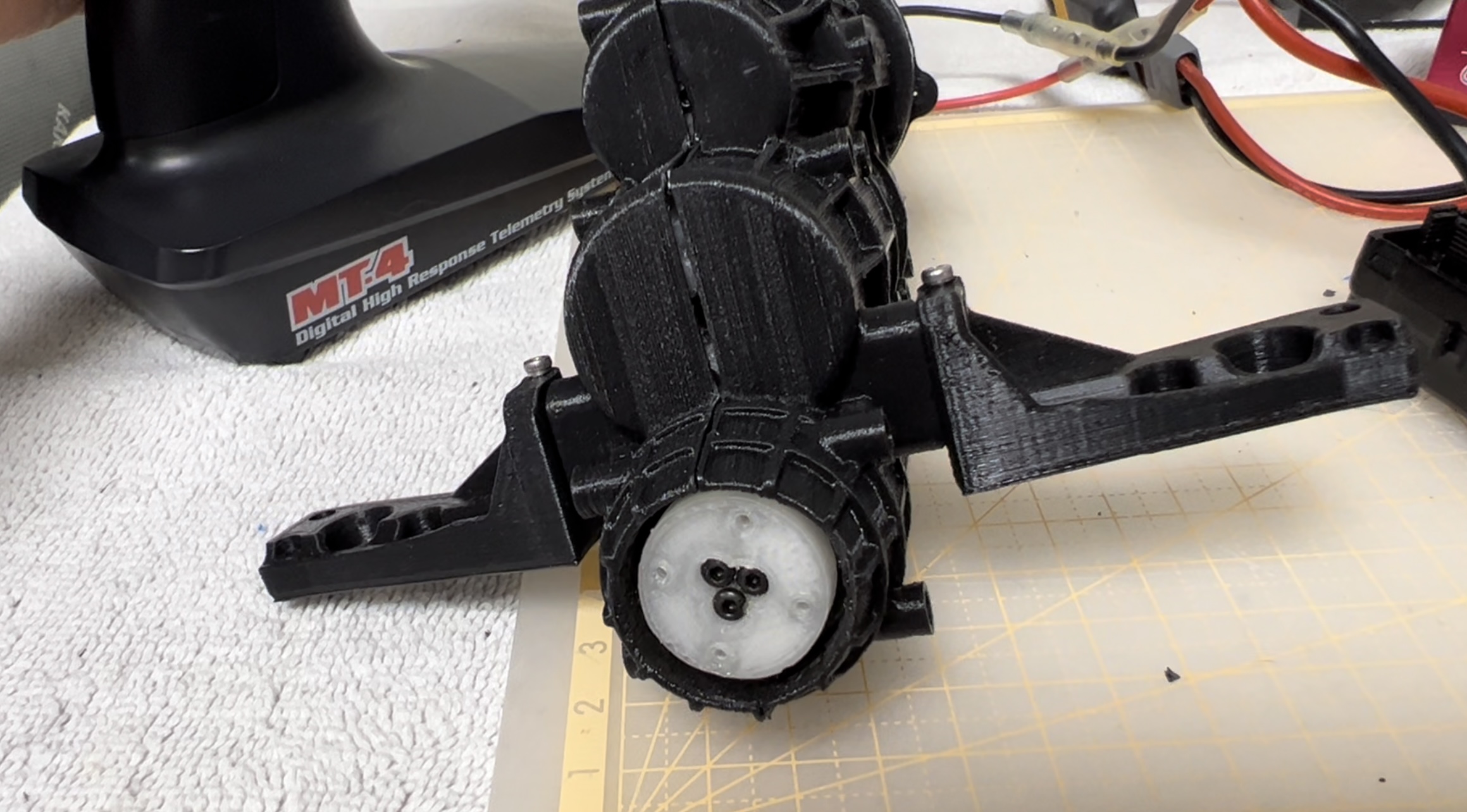
처음엔 득득 살짝 갈리는 소리가 나는듯 하지만
이내 부드러운 소리로 바뀌고 걸림없이 동력이 마지막 톱니까지 잘 전달되는 듯합니다
기어박스 구동테스트도 완료!
이대로 본체에 이식 시켜주면 될듯 싶습니다
조종기(송신기)에서 차량 선택하는 영상
모델 선택 방법
1. SYSTEM 메뉴로 이동
2. MODEL 선택
3. MODEL SELECT 선택
4. M01 / M02 선택
5. 추가로 M03에 새로운 수신기를 설정할경우 M03선택 후 바인딩
참고로 산와 수신기 MT-4의 기준으로 최대 50대 차량을 등록할 수 있다고 합니다
쉽게 수신기가 50개 있다면 조종기 1대로 50대까지 차량을 운행 할 수 있단 얘기겠죠(한번에 한대씩 선택)
가자재 및 기어박스 테스트도 완료하였으니
이제 좀더 속도를 내서 조립을 진행해보도록 하겠습니다
(조립 중간에 크기가 다른 베어링 및 볼트류가 필요하여 수급진행중;;)
'3D_Print > [RC카] 포드 브롱코 제작기_Bronco' 카테고리의 다른 글
| [3D프린터] 3RONCO 브롱코 제작기 - 5 - 리어액슬 조립 (0) | 2022.11.01 |
|---|---|
| [3D프린터] 3RONCO 브롱코 제작기 - 4 - 디프기어 / 프론트 엑슬 조립 (0) | 2022.10.14 |
| [3D프린터] 3RONCO 브롱코 제작기 - 2 - 기어박스 조립 (0) | 2022.09.10 |
| [3D프린터] 3RONCO 브롱코 제작기 1 - 샷시조립 (0) | 2022.09.02 |
| [3D프린터] Ford 브롱코(Bronco) 1:8 RC카 만들기- intro 인트로 (0) | 2022.08.09 |