PWM 출력이 가능한 핀은 D3, D5, D6, D9, D10, D11으로 총 6개 입니다. 디지털 핀과 PWM의 차이는 출력의 차이입니다. 디지털 핀은 HIGH(5V), LOW(0V)의 출력만 하는 반면 PWM은 0~255(0 ~ 5V)까지 출력이 가능한 핀입니다.
LED로 쉽게 설명하자면일반 디지털핀은 LED를 켜거나(high) 끄거나(low) 둘중 하나의 동작만 수행할 수 있는데 반해PWM핀은 값을 0에서 255까지 설정할 수 있어 값을 서서히 증가시켜 LED의 불빛을 서서히 밝게 하거나 하는 동작등을 수행할 수 있도록 하게 합니다.
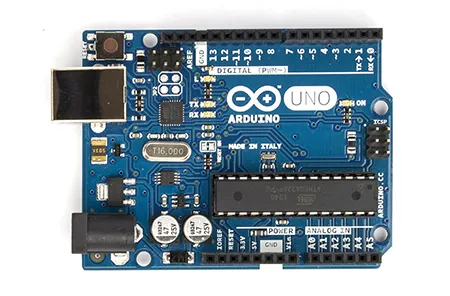
아두이노? Ivrea Interaction Design Institute에서 시제품을 쉽고 빠르게 만들기 위한 바탕으로 만들어낸 기술입니다.
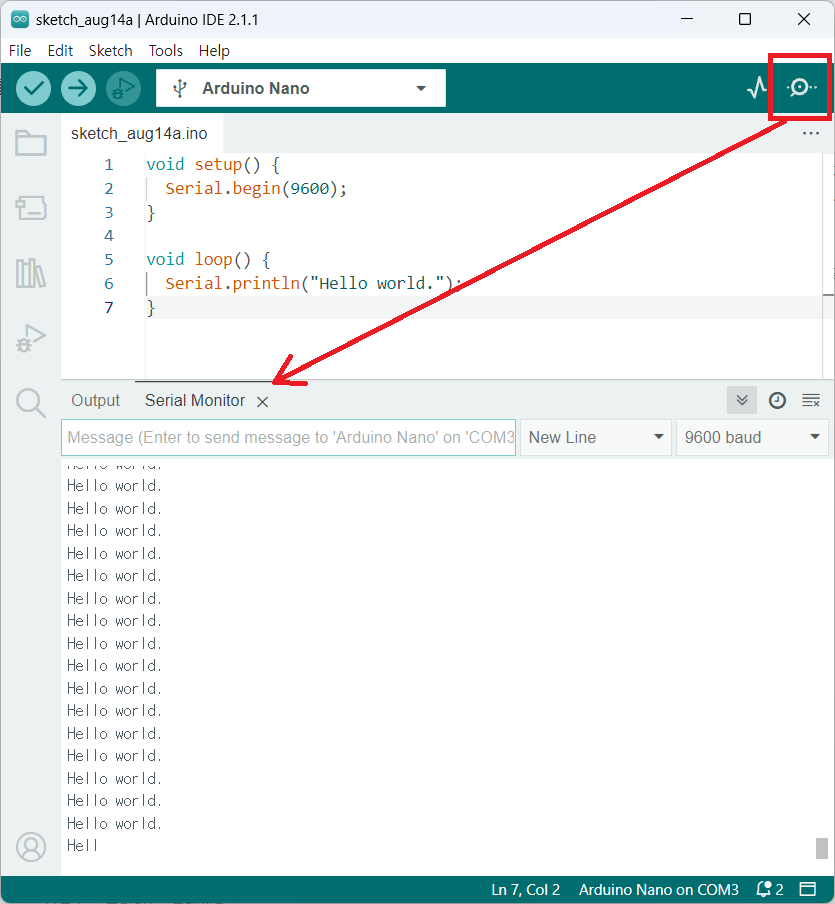
이 아두이노는 다양한 유형의 기기를 손쉽게 조종할 수 있는 작은 기판입니다. 오픈소스 하드웨어이기 때문에 설계가 모두 공개되어 있다는 점이 특징이구요. 컴퓨터에 아두이노 개발 프로그램(IDE)를 설치하고 간단하게 프로그램을 만든 다음 기판에 프로그램을 업로드하여 실행할 수 있습니다.
쉽게 한마디로 정의하면
아두이노를 가지고 주변 환경이나 특정 조건에 따라 움직이는 ‘무언가’를 만들어 낼 수 있도록 해주는 장치
라고 할수 있겠습니다.
초기에는 전기 전자나 프로그래밍 전공을 한 전문가만이 전자기판을 만지고 만들어 냈지만, 지금은 관심이 있는 사람이라면 누구나 쉽게 배우고 다루며 자신이 원하는 작동을 하는 도구로 진화했습니다.
※ 특징이라면, 서보에 전원을 인가하지 않은 상태에서도 어플이 설치된 폰을 이용해서 값을 적용/변경 할 수 있습니다.
3. 설정 값 설명
◆ neutral (뉴트럴) - 중립 : 서보의 중립 지점 위치를 조정합니다. 조정 범위는 서보의 출력 각도에 따라 다릅니다. 출력 각도 범위가 적게 설정될수록 값의 범위는 더 넓어질 수 있습니다. 조정된 오른쪽에 전원 켜기 버튼이 선택되어 있으면 서보 전원이 켜지면 자동으로 중립 지점으로 돌아갑니다.
◆gyro gain (자이로 게인) - gain이란? : 사전적 의미로 '얻다', 즉 이 항목으로 얻을수 있는 이득(利得)을 뜻합니다. 이 값의 범위를 넓히고 좁힐수록 자이로로 얻을 수 있는 양과 방향을 지정할 수 있습니다.
※ gain게인 즉 이득(利得)은 전자 공학에서 증폭기와 같은 전기 회로가 신호나 출력을 증폭하는 비율을 뜻합니다. 보통의 경우 전기 회로의 입력 신호 대비 출력 신호의 비의 로그 값으로 나타낼때 쓰입니다.
◆speed (스피드 - 속도) - 속도 : 값이 적게 설정될수록 자이로의 사용을 느끼지 않고 서보의 속도가 감소합니다.
◆dead zone (데드존) - 비활성 영역 : 값이 적게 책정될수록 정밀도가 높아집니다. 큰 수치는 서보가 가지는 진동을 방지할 수 있습니다. 정밀도가 만족스러우면 값을 최대화 해서 사용할 수 있습니다.
◆input (인풋) - 입력 : 입력 PWM 하이 레벨의 범위(우리 유닛 포함)를 뜻합니다.
※ PWM이란? PWM은 Pulse Width Modulation의 약자로펄스 폭 변조를 말하는 것입니다. 쉽게 말해, 디지털 신호를 아날로그 신호처럼 흉내내는 것이라고 보면됩니다.
◆ output angle (아웃풋 앵글) - 출력 각도 : 입력 PWM에 따른 출력 각도 범위(도 단위 포함) 선형 성능이 필요한 경우 대칭 설정이 필요합니다.
◆ soft start (소프트 스타트) - 소프트한 시작 : 전원을 켤 때 중립 지점 위치로 천천히 회전하십시오.
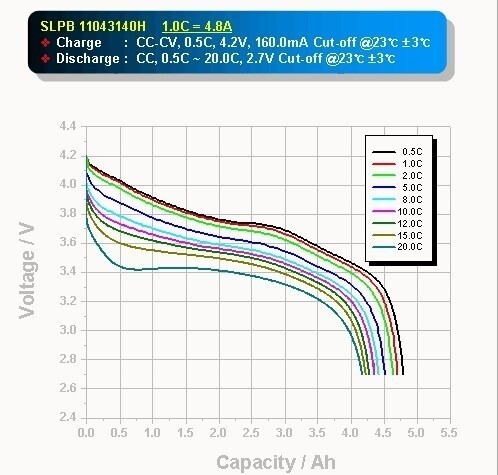
◆ max current (맥스 커런트) - 최대 전류: 서보 작동 전류 조정이 필요할 경우 설정합니다. 현재 세트가 많으면 많을수록 의 성능은 높아집니다. 속도 및 토크 증가 BEC를 사용하여 전원 공급 장치를 제공하는 경우 BEC의 기능이 다음과 일치하는지 확인이 필요합니다. 서보 최대 전류 사용 배터리 2s Li-Po일 경우 값은 3.5A로 설정할 수 있습니다. 값을 낮추면 서보의 리프트가 길어질 수 있습니다. 이 값은 신뢰성을 높입니다.
◆ startup power(스타트업 파워) - 시동 전력: 서보 스타트의 전원을 조절합니다. 약간의 작은 진동이 발생하지 않는 한 값을 조정할 필요가 없습니다. 그러면 값을 조금 낮추어 조정하시기 바랍니다.
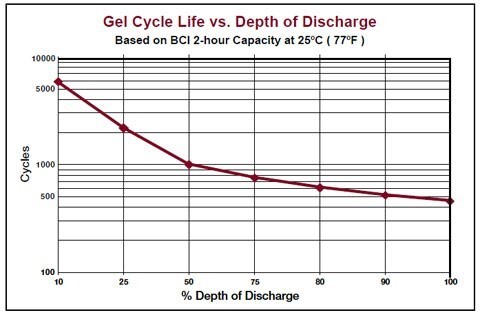
◆ overload current (오버로드 커런트) 과부하 전류: 전류 보호를 설정하도록 조정하세요(Amp 및 second 단위). 작업 전류가 1차 전류 값보다 높고 마지막 1차 시간 값인 경우, 작업 전류가 1차 전류 값까지 보호됩니다. 작업 전류가 여전히 두 번째 전류 값보다 높고 두 번째 시간 값보다 마지막인 경우, 작업 전류가 두 번째 전류 값까지 보호됩니다. 작업 전류가 여전히 세 번째 전류 값보다 높고 마지막 세 번째 시간 값인 경우 작업 전류를 세 번째 전류 값까지 보호합니다. 이러한 값들의 좋은 집합은 서보에게 더 긴 수명과 더 높은 신뢰성을 줄 수 있고 심지어 서보를 크라셔에 저장할 수도 있습니다. 서보가 걸리면 온도가 올라가서 작동 전류가 약간 낮아집니다. 이것은 서보에게 해를 끼치지 않을지도 모릅니다. 첫 번째 전류 값이 최대 전류보다 높게 설정되어 있으면 보호가 자동으로 비활성화됩니다.
◆ overload time(오버로드 타임) 과부하 전류: 전류 보호를 설정하도록 조정하세요(Amp 및 second 단위). 작업 전류가 1차 전류 값보다 높고 마지막 1차 시간 값인 경우, 작업 전류가 1차 전류 값까지 보호됩니다. 작업 전류가 여전히 두 번째 전류 값보다 높고 두 번째 시간 값보다 마지막인 경우, 작업 전류가 두 번째 전류 값까지 보호됩니다. 작업 전류가 여전히 세 번째 전류 값보다 높고 마지막 세 번째 시간 값인 경우 작업 전류를 세 번째 전류 값까지 보호합니다. 이러한 값들의 좋은 집합은 서보에게 더 긴 수명과 더 높은 신뢰성을 줄 수 있고 심지어 서보를 크라셔에 저장할 수도 있습니다. 서보가 걸리면 온도가 올라가서 작동 전류가 약간 낮아집니다. 이것은 서보에게 해를 끼치지 않을지도 모릅니다. 첫 번째 전류 값이 최대 전류보다 높게 설정되어 있으면 보호가 자동으로 비활성화 됩니다.
ssr input PWM
[원본 출처] RAZOR-D1 서보 메뉴설명 (드리프트 클럽 [ Korea Rc Drift Club ]) | 작성자 김*일78 DDR 스텝 + 컨제 각색