아두이노에 코드를 입력해 하는 동작을 하게끔 일을 시키기 위해서는 PC에 드라이버 및 프로그램을 살치해야 합니다.
아래 절차를 천천히 따라하면 쉽게 설치가 가능합니다.
#아두이노 나노 연결방법
아두이노 드라이버 설치하기
→ 드라이버란? PC에 연결되는 기기가 어떤 녀석인지 상세히 적힌 설명서의 개념.
1. 사이트 에서 드라이버를 다운로드
https://sparks.gogo.co.nz/ch340.html
CH340 Drivers for Windows, Mac and Linux
Did you know you automatically get $5 off for every $50 added to your cart? Well, now you know. ( Excludes shipping/handling & sale items, not in conjuction with any other voucher/discount/promo code. )
'RC_Car > RC & 아두이노 [Arduino] 콜라보' 카테고리의 다른 글
| 아두이노 나노로 AM32 세부셋팅하기 (0) | 2024.05.28 |
|---|---|
| [DIY] 아두이노로 RC – USB Adapter 제작 (VRC Pro게임) (0) | 2024.05.23 |
| [아두이노 나노] RC 송수신기의 신호를 잡아보자 (0) | 2023.11.14 |
| [아두이노 나노] 핀맵(Pin Map) 및 PWM 핀 설명 (0) | 2023.08.23 |
| 아두이노(Arduino)란 무엇인가? (0) | 2023.08.11 |
아두이노(Arduino)란 무엇인가?
아두이노(Arduino)란 무엇인가?
아두이노? Ivrea Interaction Design Institute에서 시제품을 쉽고 빠르게 만들기 위한 바탕으로 만들어낸 기술입니다.
이 아두이노는 다양한 유형의 기기를 손쉽게 조종할 수 있는 작은 기판입니다. 오픈소스 하드웨어이기 때문에 설계가 모두 공개되어 있다는 점이 특징이구요. 컴퓨터에 아두이노 개발 프로그램(IDE)를 설치하고 간단하게 프로그램을 만든 다음 기판에 프로그램을 업로드하여 실행할 수 있습니다.
쉽게 한마디로 정의하면
아두이노를 가지고 주변 환경이나 특정 조건에 따라 움직이는 ‘무언가’를 만들어 낼 수 있도록 해주는 장치
라고 할수 있겠습니다.
초기에는 전기 전자나 프로그래밍 전공을 한 전문가만이 전자기판을 만지고 만들어 냈지만, 지금은 관심이 있는 사람이라면 누구나 쉽게 배우고 다루며 자신이 원하는 작동을 하는 도구로 진화했습니다.
이 기판에 코딩을 해서 원하는 동작을 할 수 있도록 합니다.
'RC_Car > RC & 아두이노 [Arduino] 콜라보' 카테고리의 다른 글
| 아두이노 나노로 AM32 세부셋팅하기 (0) | 2024.05.28 |
|---|---|
| [DIY] 아두이노로 RC – USB Adapter 제작 (VRC Pro게임) (0) | 2024.05.23 |
| [아두이노 나노] RC 송수신기의 신호를 잡아보자 (0) | 2023.11.14 |
| [아두이노 나노] 핀맵(Pin Map) 및 PWM 핀 설명 (0) | 2023.08.23 |
| 아두이노 나노 프로그램 PC에 설치하기 (연결방법) (0) | 2023.08.14 |
THETA RAZOR-D1 NFC셋팅 서보 앱 메뉴 설명

1. THETA RAZOR 어플 다운로드 설치
모바일로 웹사이트에 방문합니다.
※ IOS를 사용하는 아이폰은 설치가 불가능합니다. 반드시 안드로이드 OS를 사용하는 폰으로만 설치가 가능합니다.
(아이폰에서 NFC를 지원하지 않기에 사용불가 / PC에서도 불가능)
http://www.fastech.cc/
Home
Committed to manufacturing top model servos, bringing top control experience to the majority of model players
www.fastech.cc
→ 정식앱이 아닌 설치형 앱이라 구글플레이 스토어에서는 검색되지 않고 이 방법을 통해서 설치를 진행해야 합니다.
홈페이지에 접속해서 메인화면 좌측 상단 三을 터치합니다.

Software Download를 터치해서 다음 메뉴로 이동합니다.

THETA.APK를 터치해서 어플을 설치합니다.
(설치 과정에서 경고메시지를 띄울수 있으나, 컨펌하고 설치를 진행합니다)

※ 휴대폰의 NFC기능을 활성화 시킵니다.
2. NFC 연결방법 및 설정값 변경 → 유튜브 동영상 참고
※ 특징이라면, 서보에 전원을 인가하지 않은 상태에서도 어플이 설치된 폰을 이용해서 값을 적용/변경 할 수 있습니다.
3. 설정 값 설명
◆ neutral (뉴트럴)
- 중립 : 서보의 중립 지점 위치를 조정합니다.
조정 범위는 서보의 출력 각도에 따라 다릅니다.
출력 각도 범위가 적게 설정될수록 값의 범위는 더 넓어질 수 있습니다.
조정된 오른쪽에 전원 켜기 버튼이 선택되어 있으면 서보 전원이 켜지면 자동으로 중립 지점으로 돌아갑니다.
◆ gyro gain (자이로 게인)
- gain이란? : 사전적 의미로 '얻다', 즉 이 항목으로 얻을수 있는 이득(利得)을 뜻합니다.
이 값의 범위를 넓히고 좁힐수록 자이로로 얻을 수 있는 양과 방향을 지정할 수 있습니다.
※ gain게인 즉 이득(利得)은 전자 공학에서 증폭기와 같은 전기 회로가 신호나 출력을 증폭하는 비율을 뜻합니다. 보통의 경우 전기 회로의 입력 신호 대비 출력 신호의 비의 로그 값으로 나타낼때 쓰입니다.
◆ speed (스피드 - 속도)
- 속도 : 값이 적게 설정될수록 자이로의 사용을 느끼지 않고 서보의 속도가 감소합니다.
◆ dead zone (데드존)
- 비활성 영역 : 값이 적게 책정될수록 정밀도가 높아집니다. 큰 수치는 서보가 가지는 진동을 방지할 수 있습니다.
정밀도가 만족스러우면 값을 최대화 해서 사용할 수 있습니다.
◆ input (인풋)
- 입력 : 입력 PWM 하이 레벨의 범위(우리 유닛 포함)를 뜻합니다.
※ PWM이란? PWM은 Pulse Width Modulation의 약자로 펄스 폭 변조를 말하는 것입니다. 쉽게 말해, 디지털 신호를 아날로그 신호처럼 흉내내는 것이라고 보면됩니다.
◆ output angle (아웃풋 앵글)
- 출력 각도 : 입력 PWM에 따른 출력 각도 범위(도 단위 포함) 선형 성능이 필요한 경우 대칭 설정이 필요합니다.
◆ soft start (소프트 스타트)
- 소프트한 시작 : 전원을 켤 때 중립 지점 위치로 천천히 회전하십시오.
◆ max current (맥스 커런트)
- 최대 전류: 서보 작동 전류 조정이 필요할 경우 설정합니다. 현재 세트가 많으면 많을수록 의 성능은 높아집니다.
속도 및 토크 증가 BEC를 사용하여 전원 공급 장치를 제공하는 경우 BEC의 기능이 다음과 일치하는지 확인이 필요합니다. 서보 최대 전류 사용 배터리 2s Li-Po일 경우 값은 3.5A로 설정할 수 있습니다.
값을 낮추면 서보의 리프트가 길어질 수 있습니다.
이 값은 신뢰성을 높입니다.
◆ startup power(스타트업 파워)
- 시동 전력: 서보 스타트의 전원을 조절합니다. 약간의 작은 진동이 발생하지 않는 한 값을 조정할 필요가 없습니다.
그러면 값을 조금 낮추어 조정하시기 바랍니다.
◆ overload current (오버로드 커런트)
과부하 전류: 전류 보호를 설정하도록 조정하세요(Amp 및 second 단위).
작업 전류가 1차 전류 값보다 높고 마지막 1차 시간 값인 경우, 작업 전류가 1차 전류 값까지 보호됩니다.
작업 전류가 여전히 두 번째 전류 값보다 높고 두 번째 시간 값보다 마지막인 경우, 작업 전류가 두 번째 전류 값까지 보호됩니다.
작업 전류가 여전히 세 번째 전류 값보다 높고 마지막 세 번째 시간 값인 경우 작업 전류를 세 번째 전류 값까지 보호합니다.
이러한 값들의 좋은 집합은 서보에게 더 긴 수명과 더 높은 신뢰성을 줄 수 있고 심지어 서보를 크라셔에 저장할 수도 있습니다.
서보가 걸리면 온도가 올라가서 작동 전류가 약간 낮아집니다.
이것은 서보에게 해를 끼치지 않을지도 모릅니다.
첫 번째 전류 값이 최대 전류보다 높게 설정되어 있으면 보호가 자동으로 비활성화됩니다.
◆ overload time(오버로드 타임)
과부하 전류: 전류 보호를 설정하도록 조정하세요(Amp 및 second 단위).
작업 전류가 1차 전류 값보다 높고 마지막 1차 시간 값인 경우, 작업 전류가 1차 전류 값까지 보호됩니다.
작업 전류가 여전히 두 번째 전류 값보다 높고 두 번째 시간 값보다 마지막인 경우, 작업 전류가 두 번째 전류 값까지 보호됩니다.
작업 전류가 여전히 세 번째 전류 값보다 높고 마지막 세 번째 시간 값인 경우 작업 전류를 세 번째 전류 값까지 보호합니다.
이러한 값들의 좋은 집합은 서보에게 더 긴 수명과 더 높은 신뢰성을 줄 수 있고 심지어 서보를 크라셔에 저장할 수도 있습니다.
서보가 걸리면 온도가 올라가서 작동 전류가 약간 낮아집니다.
이것은 서보에게 해를 끼치지 않을지도 모릅니다.
첫 번째 전류 값이 최대 전류보다 높게 설정되어 있으면 보호가 자동으로 비활성화 됩니다.
ssr input PWM
[원본 출처] RAZOR-D1 서보 메뉴설명 (드리프트 클럽 [ Korea Rc Drift Club ]) | 작성자 김*일78 DDR 스텝
+ 컨제 각색
'RC_Car > RC 스토리' 카테고리의 다른 글
| [장비구입 후기] RC 코너 웨이트 (1) | 2023.12.01 |
|---|---|
| RC모터 턴수에 대한 고찰 (0) | 2023.08.25 |
| 초저렴 백파이어 제작 후기(단돈 1$) (0) | 2023.07.19 |
| [LiPo] RC - 리포 배터리 정보 및 이론, 관리방법 전문 (0) | 2023.07.11 |
| [RC드리프트] 레이아웃 참고용 드리프트 서킷 모음 (0) | 2023.07.06 |
[RC드리프트] 전국 RC 드리프트 전용 서킷 정보 모음
[RC드리프트] 현재 운영중인 전국 드리프트 서킷 정보 2023.07.29일자 기준
1. 인천 드리프트 하이 서킷
[ 아스팔트류 / D-Like 소프트 타이어 ]
인천 서구 원창동 147-2 ,A동 3층
2. 남양주 오거나이저 서킷
[ 에폭시 / Yokomo DRC 카펫타이어 ]
경기도 남양주시 와부읍 월문리 542
3. 수원 레드존 서킷
[ 아스팔트 / Yokomo DRA 아스팔트 타이어 ]
경기도 화성시 정남면 괘랑2길 46-11
4. 평택 시크릿베이스 서킷
[ 에폭시 / DS Racing CS3 LF-4 타이어 ]
경기도 평택시 서탄면 서탄로 324 포멘코리아 건물뒤 2층 진입로
5. 용인 행루즈 서킷
[ 아스팔트 / Reve D 아스팔트 타이어 ]
경기도 용인시 처인구 통삼로282-34
6. 김포 더트랙내 드리프트서킷
[ 에폭시 / Yokomo DRC 카펫타이어 ]
경기도 김포시 대곶면 상마신기로41번길 115
7. 인천 팀 LIBERA 서킷
[ P타일 / Yokomo DRC 카펫타이어 ]
인천광역시 서구 백범로934번길 27-1(가좌동 178-111, 드림정공 2층)
8. 평택 팀 D CREW 서킷
[ P타일 / Yokomo DRC 카펫타이어 ]
경기도 경기도 평택시 서탄면 수월암4길 232
[ 수도권 외 지역 ]
9. 울산 새봄 아레나 서킷
[ P타일 / Yokomo DRC 카펫타이어 ]
울산 울주군 범서읍 대동길 50-1 비하1층(천상극동아파트 상가지하)
10. 대구 팀 TDF 서킷
[ P타일 / DS Racing Finix LF-5 ]
대구 달서구 상인동 1472번지 4층(2층에 금조한의원이 있음)
11. 창원 팀 DDR 서킷
[ 데코타일 / DS Racing FFF Zero mark2 ]
창원시 의창구 명서동 206-2 지하1층 DDR서킷
'RC_Car > RC 드리프트(Drift)' 카테고리의 다른 글
| 브론즈 하이브리드 - 베벨기어 손상 / 그리고 견적 (0) | 2024.08.25 |
|---|---|
| RC 배기파이프 (머플러 / 마후라) 디테일 업그레이드 (0) | 2024.08.12 |
| [드리프트 RC 대회] KDC 2023 참가하다 (0) | 2023.05.30 |
| 하이브리드 코너 웨이트 측정 후기 (0) | 2023.05.15 |
| 3D프린터로 RC카 rim(휠) 뽑아보자! (0) | 2023.04.06 |
[자작DIY] 리어윙(Rear Wing) 긴 버전(Long) 제작기
컨제입니다
최근 GT-R 바디 도색을 완료하고, 이후 외관에 실차감을 줄수 있는 악세서리를 장착하는 과정중
차량 리어 부분에 달아줄 윙을 달아주려고 각을 재보는데
번들로 같이 딸려온 플라스틱 윙마운트가 영 마음에 들지 않았습니다.
트렁크위에 구멍을 뚫어 장착하는 마운트였는데, 여럿 GT-R을 봤을때 트렁크에 부착하는것 보단
리어 번호판에서 위쪽으로 올려져 간 윙마운트에 마음이 더 갔습니다.
전에 M4 바디에 장착했던 윙마운트와 동일하게 장착해주고 싶은데

GT-R의 경우 번호판 위치와 트렁크의 길이가 좀 길어서 M4에 달아준 윙마운트는 상대적으로 짧을것 같은 느낌.
판매되는 윙마운트를 사서 달면, 짧은 길이로 인해 너무 웃긴 모양새가 나올것 같다는 생각이 듭니다.
그래서 GT-R에 맞는 윙 마운트를 제작할 필요성을 느꼈습니다
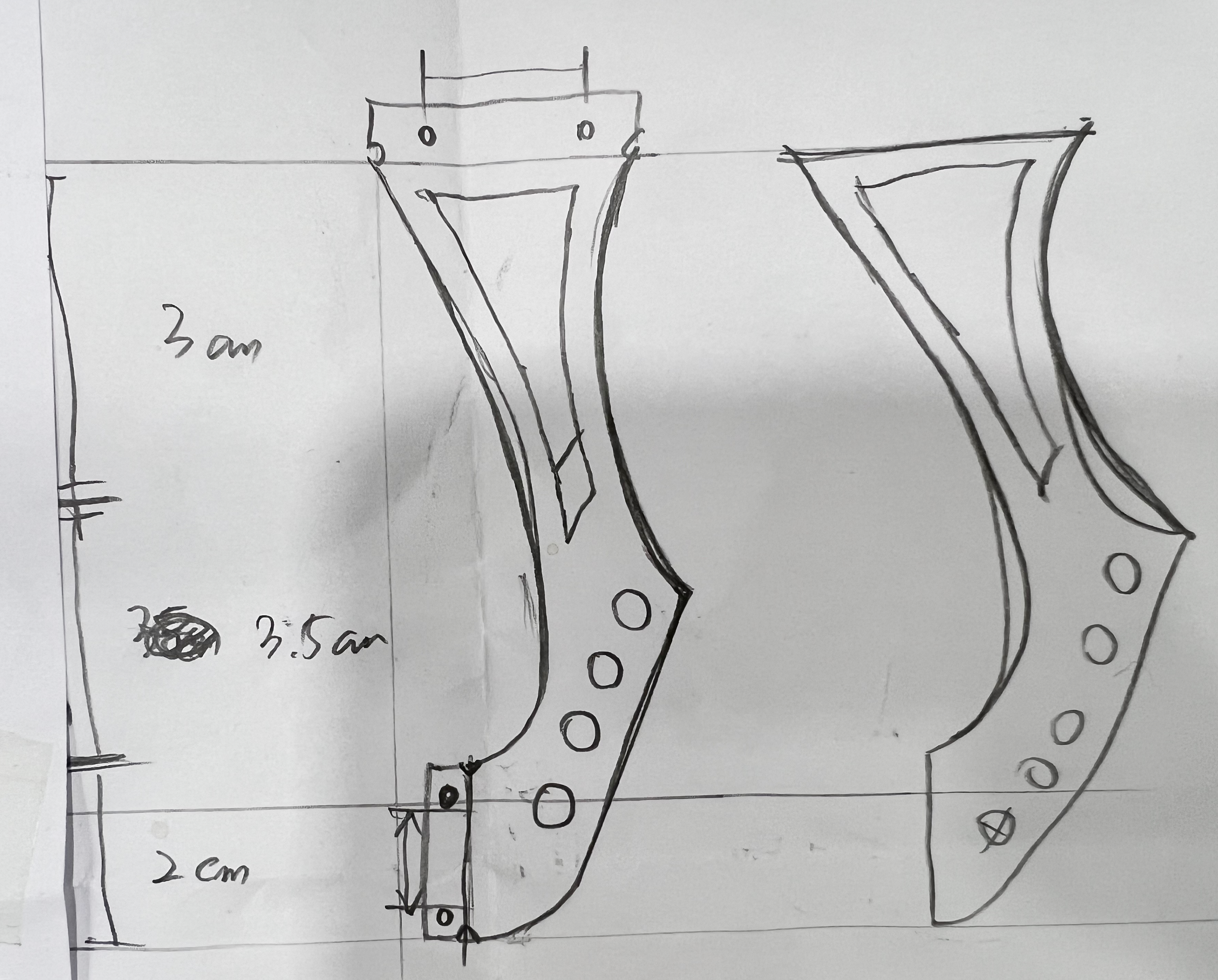
일단 종이에 연필로 대충 슥슥 그려봅니다
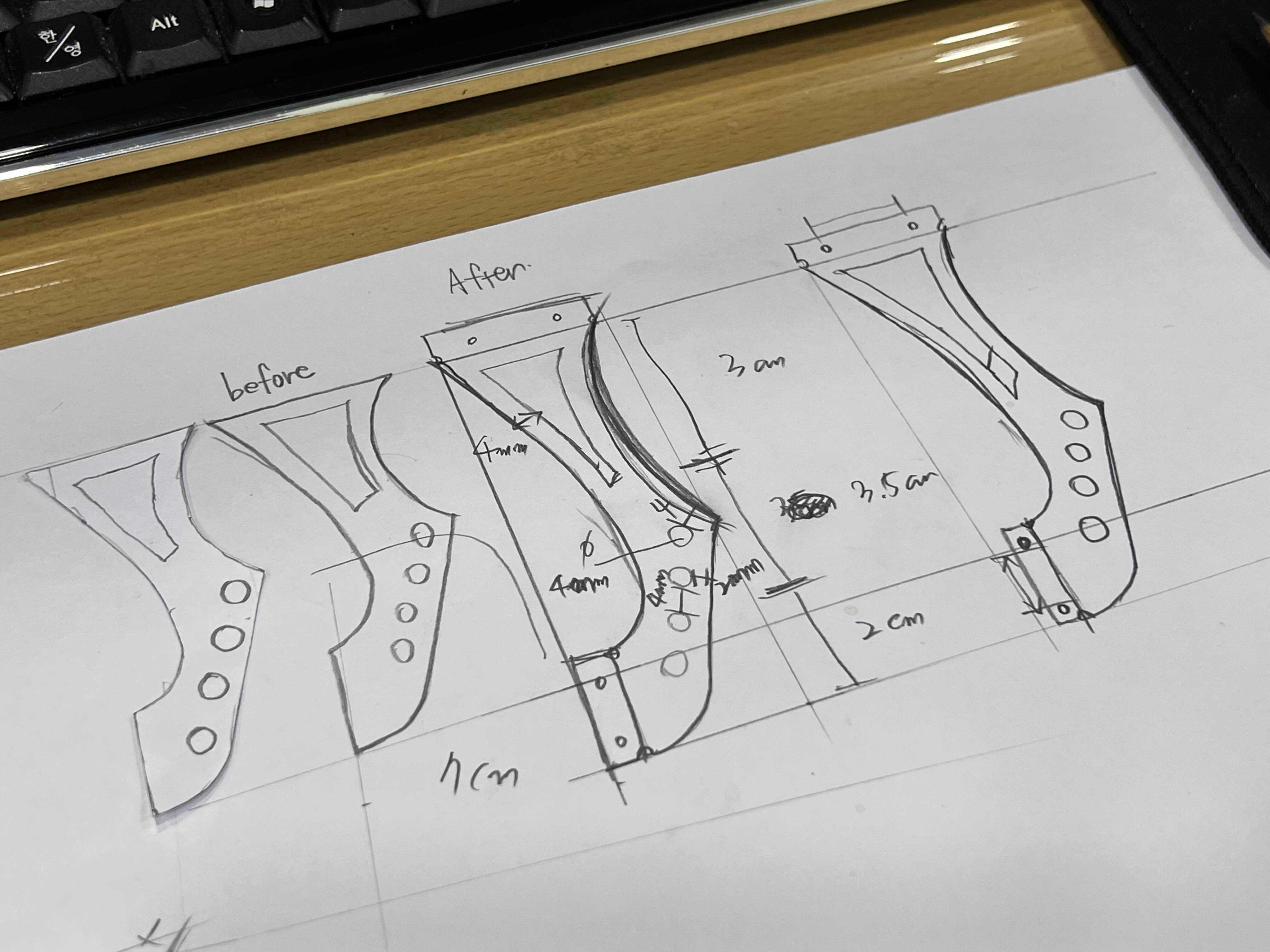
여러개 그려본 후 맘에드는 녀석을 핸드폰으로 촬영해서 PC로 옮겨갑니다
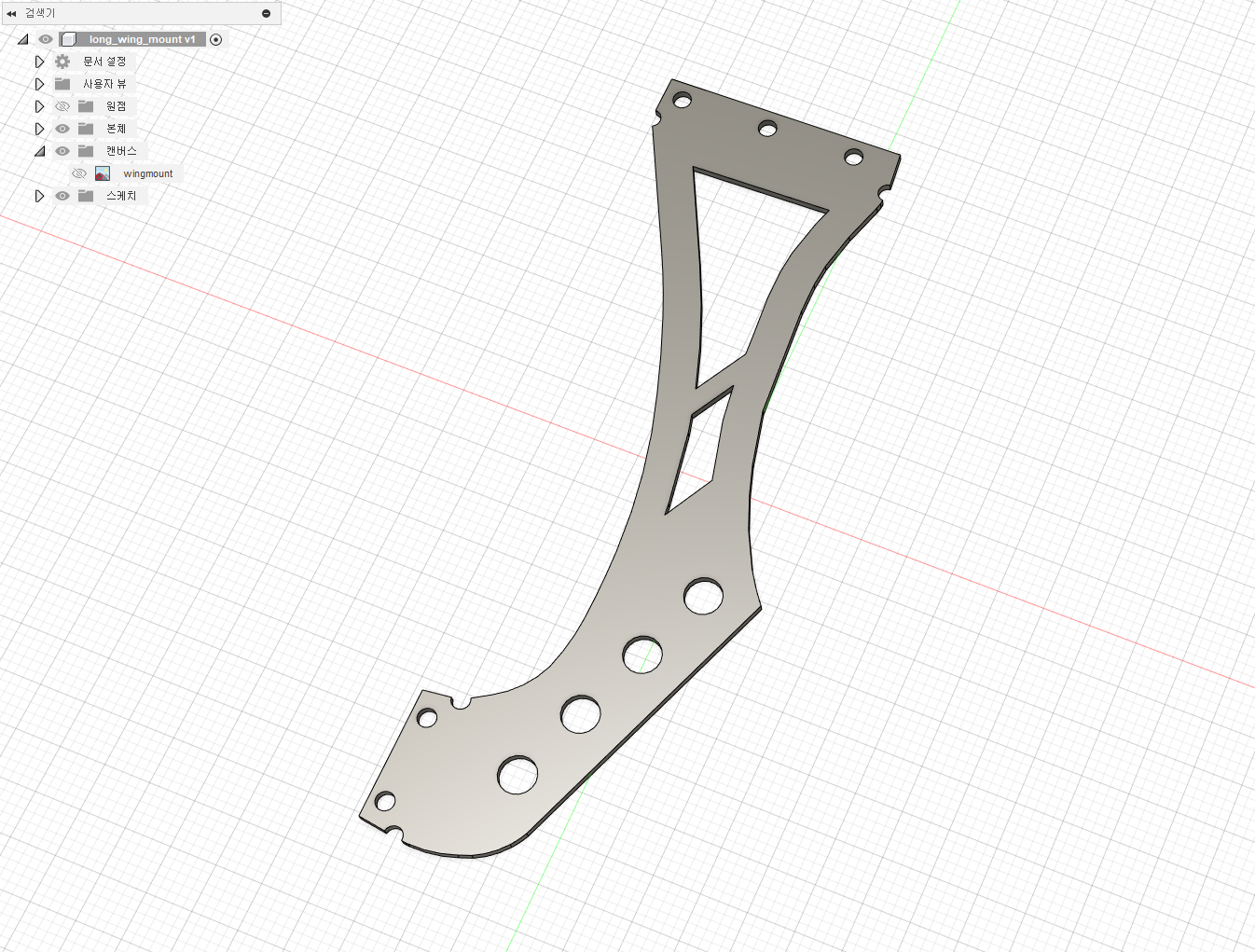
그린 그림을 그대로 퓨전360으로 가져가서 라인을 따라 대고 그려봅니다.
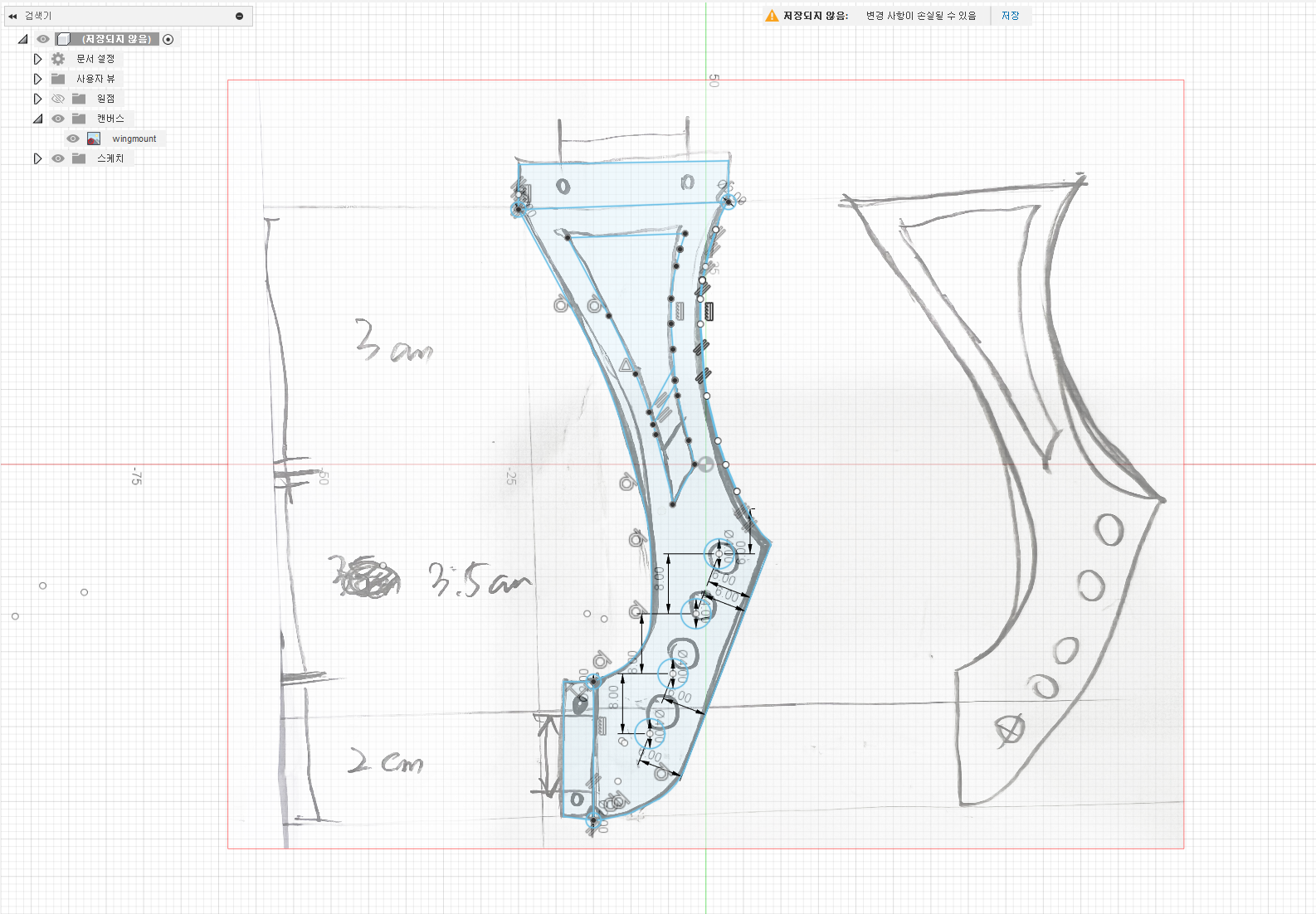
스케치가 완료되면 그대로 1mm만 돌출시켜 형태를 한번 봅니다.
얼추 그럴싸 하게 나온것 같습니다.
상단과 하단의 홈을 기준으로 90도 접어서 마운트가 될수 있도록 할 예정입니다.
퓨전 360에서 그린 도면을 캐드파일(.dwg)로 변환해서 레이저 가공업체에 보냈는데, 형식 및 수치등 가공하기에는 많이 주족하다는 피드백을 받았습니다
그리하여 지인에게 부탁하여 다시 캐드로 그렸습니다
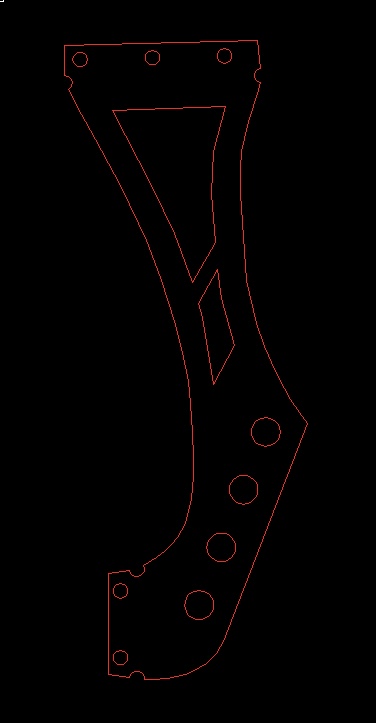
이를 토대로 다시 가공업체에 의뢰.
이곳저곳 가능한 저렴하게 해주는 업체를 찾는데 쉽지 않았습니다.
몇군데 견적을 받아보니 그냥 기성품 사는 금액이 더 저렴하게 느껴질 정도네요;;
그래도 판매하는 기성품은 사이즈가 맞지 않아 사용할 수 없어 제작을 진행하기로 한거니 좀더 찾아봅니다
.
.
.
방법을 찾던 와중
대박!!!
헬프를 외친 카페에서 선뜻 도와주겠다고 하신분이 나타나 주셨습니다!!! 너무도 감사한 일!!!
캐드파일을 그분에게 보내드리고 잘 컷팅 되었다는 소식을 듣고 몇일후 택배까지 무사히 잘 받을수 있었습니다!

너무 이쁘게 잘 컷팅된것 같습니다
GT-R 바디에 대어보니 얼추 모양이 나옵니다
구웃~👍

이제 위 아래를 90도로 휘어(절곡) 바디와 윙을 마운트할 수 있도록 해야합니다
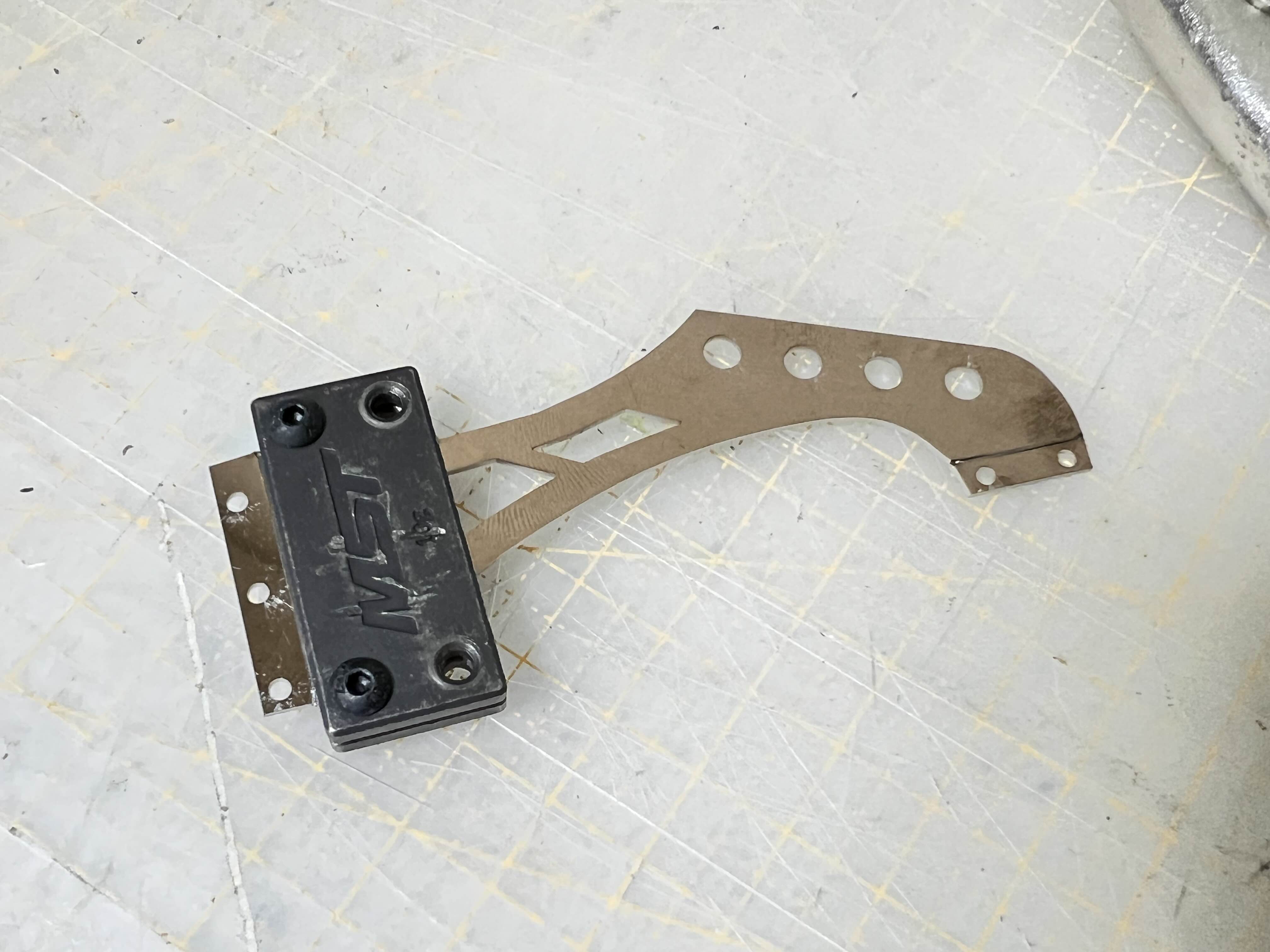
절곡을 최대한 흠집내지 않고 이쁘게 하기위해 방법을 고안하던중 드리프트 차량 리어에서 떼어낸 10g 무게추가 눈에 쏙 들어오네요
고정되어야할 면을 무개추와 바이스로 꽈악 움켜쥐고 니퍼로 튀어나온 부분을 90도로 휘어줍니다

끝부분만 살짝 흠집이 나긴 했지만, 마운트하면 숨겨지므로 크게 개의치 않습니다
양쪽으로 달아야 하기에 두개 모두 셀프절곡을 진행하고
바디에 장착해 주었습니다
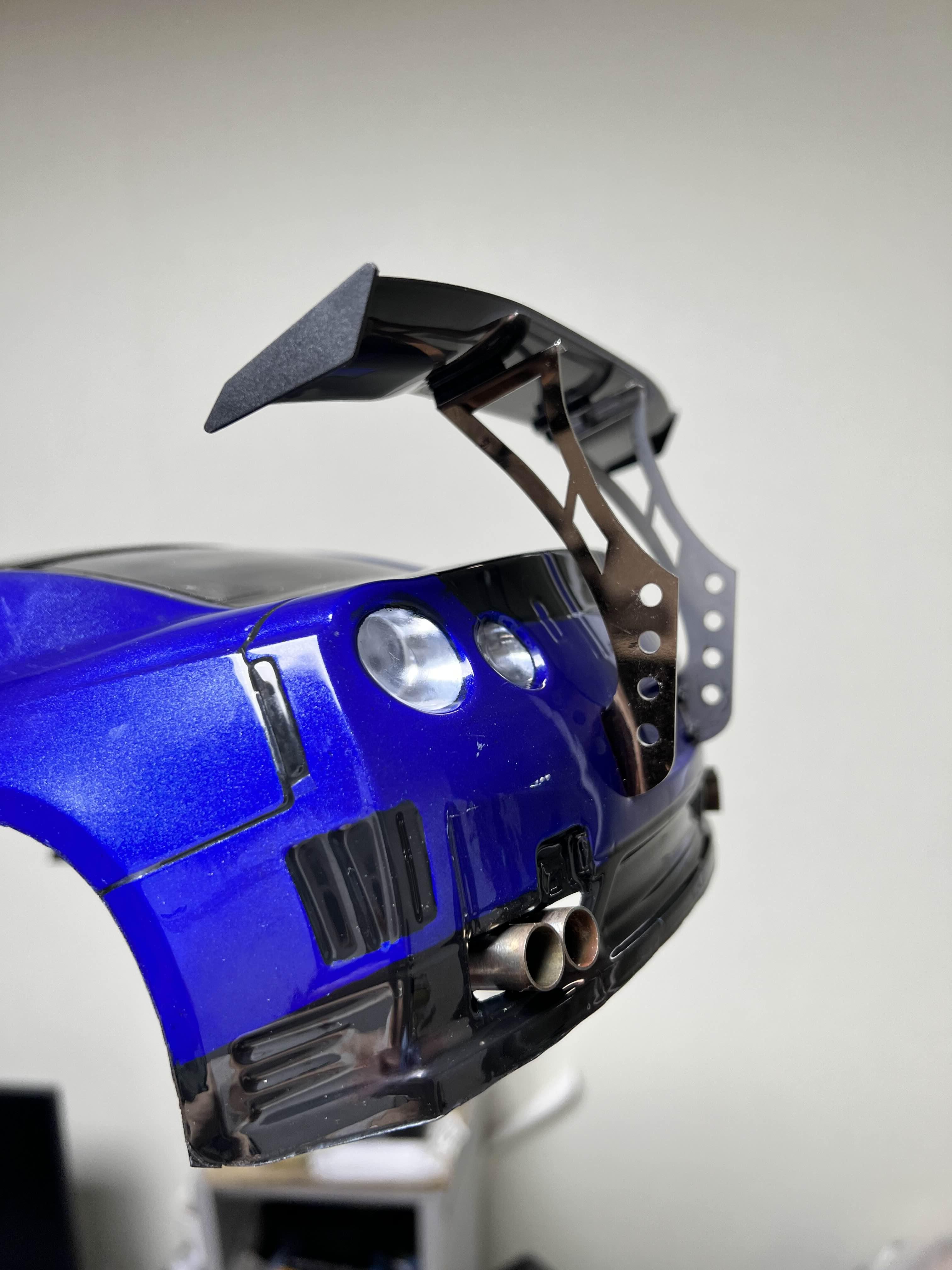
바디에 아트나이프로 일자로 선을 그어 들어갈 부분만 커팅해주고 윙마운트를 넣어준뒤 장착 구멍은 M2로 쓸수있게 구멍을 뚫었으니 M2 6mm로 연결해주면 끝!
오오
GT-R 바디의 실차감이 상승되었습니다!!!
자작이라 더욱 애착이 가고 맘에듭니다~!!
물론 보완해야할 점은 보이네요
추후 동일하게 제작을 진행할 경우에는 단점을 보완해서 제작해봐야 겠다는 생각을 합니다.
마지막으로
제작에 큰 도움 주신 분께 감사의 인사를 전해드립니다
이상 자작 윙마운트 만들어 달아주기
끗~!
'RC_Car > RC 바디 제작기' 카테고리의 다른 글
| [PANDORA] 판도라 86 ZN6 바디 도색 - 2nd (1) | 2024.09.23 |
|---|---|
| [PANDORA] 판도라 86 ZN6 바디 도색 - 1st (0) | 2024.02.02 |
| [바디 악세사리] GT-R 사이드 스커트 제작 (0) | 2023.09.03 |
| [RC Item] 초저렴 백파이어 제작 후기(단돈 1$) (0) | 2023.07.23 |
| [RC 드리프트] GT-R 바디 도색 과정 (0) | 2023.06.10 |
[RC Item] 초저렴 백파이어 제작 후기(단돈 1$)
올해 초 드하서킷 사장님께서 일본에서 받아온 선물 핸드메이드 머플러 정보를 올려주신적이 있었습니다

혹시 저걸로 재밌는게 나올수 있지 않을까 하고
저도 보고 바로 알리에 주문을 넣었더랬습니다~
https://a.aliexpress.com/_onJvMcv
US $0.94 50% Off | 미니 자전거 라이트 2 개, 배터리 없음, 산악 도로 자전거 경고등, LED 타이어 타
US $0.94 50% Off | 미니 자전거 라이트 2 개, 배터리 없음, 산악 도로 자전거 경고등, LED 타이어 타이어 밸브 캡, 휠 스포크 LED 라이트
star.aliexpress.com
그리고 잊고 까먹었을 때쯔~음 도착!!! (알리의 묘미)
두개 셋트로 1달러 우리돈 1300원꼴 들었구요
이렇게 생겼습니다

뒤에 전원 연결방법이 설명되어 있습니다

자전거나 차량휠 부분에 장착하면 충격이 가해질때 led불빛이 켜지는 작동이라..
매커니즘이 궁금해 바로 분해해봅니다

메인은 가운데 led가 박혀있는 기판!!
자세히 살펴보니

이렇게 생겼네요
이 기판에 충격이 가해지면
가운데 부분에 있는 황동스프링이 정 가운데 은색 침에 닿고
이 행위가 전기를 on시켜 전류가 흐르게 하는 방식이었습니다
충격이 없어지면 황동스프링은 제자리로 돌아가고 은색침과 떨어지며 전원off
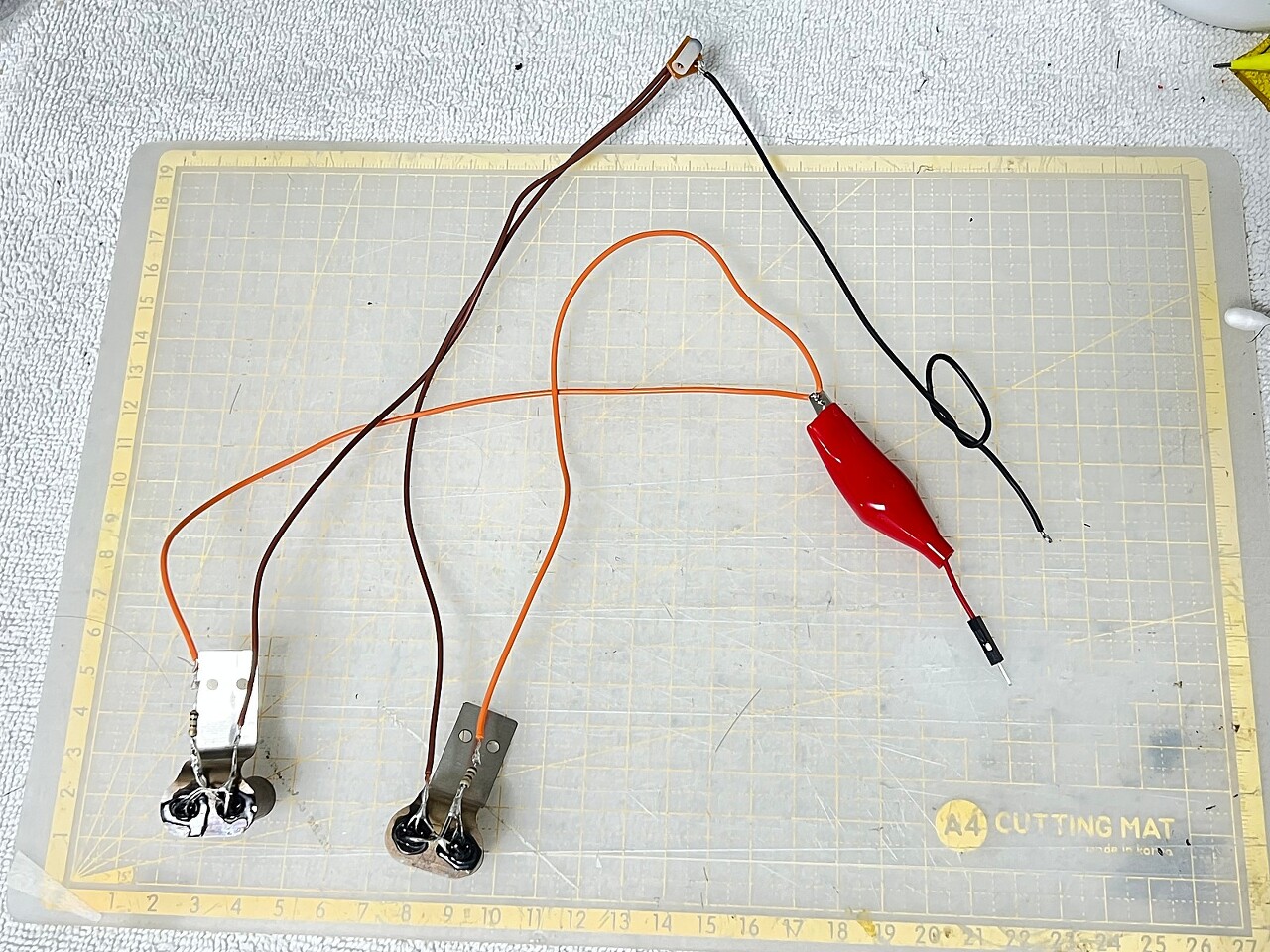
매커니즘을 확인했으니 led와 본체를 따로 분리 시켜줍니다
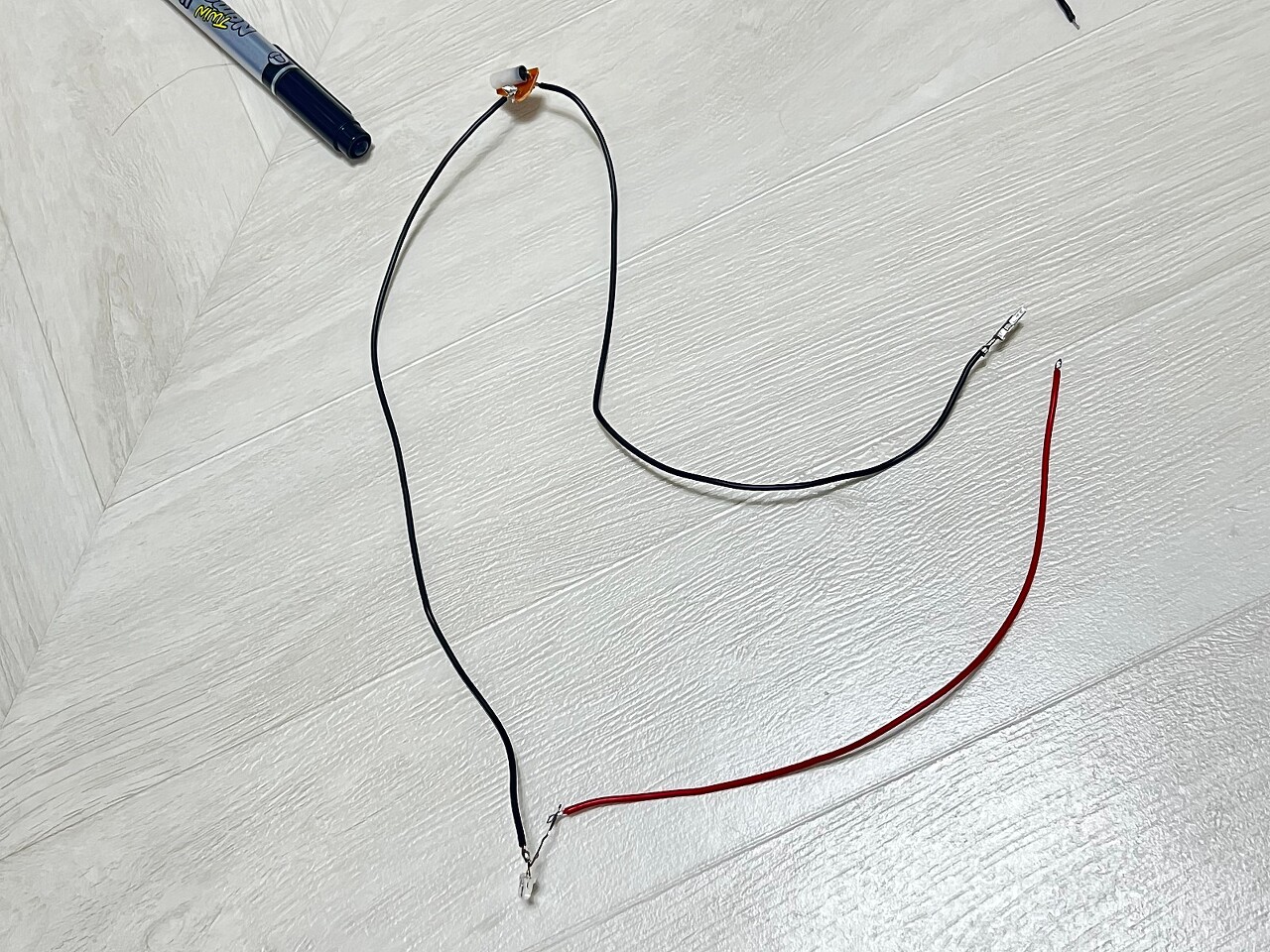
우선 이렇게 연결하고 테스트 해보니 정상작동 확인!
led를 중복으로 달꺼라 병렬연결로 선을 달고

머플러에 미리 led를 심어주고 (구멍 하나에 각각 빨강/주황led 총 8개)

led타지 말라고 저항도 달아주고(5v전원이므로 100옴)

다 연결해주면 완료!
다 되었으니 바디에 연결해서 최종 정상동작 여부를 확인해봅니다!
잘 작동해서 바로 바디 장착해주었습니다ㅎㅎ
충격을 줄때마다 번쩍번쩍✨
바디 장착후 노면에서 올라오는 작은 진동, 그리고
코너링에서 드리프트시 원심력으로 인해 백파이어가 빛을 발하는 광경이 연출됩니다.
백파이어가 풀 스로틀에 반응하는건 아니지만
나름 비슷한 효과를 초저렴 비용으로 낼수 있는 재밌는 아이템인것 같습니다~
이상
초저렴 백파이어 자작 후기를 마칩니다~😁
-끗-
'RC_Car > RC 바디 제작기' 카테고리의 다른 글
| [PANDORA] 판도라 86 ZN6 바디 도색 - 2nd (1) | 2024.09.23 |
|---|---|
| [PANDORA] 판도라 86 ZN6 바디 도색 - 1st (0) | 2024.02.02 |
| [바디 악세사리] GT-R 사이드 스커트 제작 (0) | 2023.09.03 |
| [자작DIY] 리어윙(Rear Wing) 긴 버전(Long) 제작기 (0) | 2023.07.24 |
| [RC 드리프트] GT-R 바디 도색 과정 (0) | 2023.06.10 |
초저렴 백파이어 제작 후기(단돈 1$)
컨제입니다
자주 가는 서킷에서 흥미로운 핸드메이드 머플러 정보를 입수했습니다.
바로 자전거 휠 LED!

혹시 저걸로 재밌는게 나올수 있지 않을까 하고
저도 보고 바로 알리에 주문을 넣었더랬습니다~
https://a.aliexpress.com/_onJvMcv
US $0.94 50% Off | 미니 자전거 라이트 2 개, 배터리 없음, 산악 도로 자전거 경고등, LED 타이어 타
US $0.94 50% Off | 미니 자전거 라이트 2 개, 배터리 없음, 산악 도로 자전거 경고등, LED 타이어 타이어 밸브 캡, 휠 스포크 LED 라이트
star.aliexpress.com
그리고 잊고 까먹었을 때쯔~음 도착 (알리의 묘미)
두개 셋트로 1달러 우리돈 1300원꼴 들었구요
이렇게 생겼습니다

뒤에 전원 연결방법이 설명되어 있습니다

자전거나 차량휠 부분에 장착하면 충격이 가해질때 led불빛이 켜지는 작동이라..
매커니즘이 궁금해 바로 분해해봅니다

메인은 가운데 led가 박혀있는 기판!!
자세히 살펴보니

이렇게 생겼네요
이 기판에 충격이 가해지면
가운데 부분에 있는 황동스프링이 정 가운데 은색 침에 닿고
이 행위가 전기를 on시켜 전류가 흐르게 하는 방식이었습니다
충격이 없어지면 황동스프링은 제자리로 돌아가고 은색침과 떨어지며 전원off
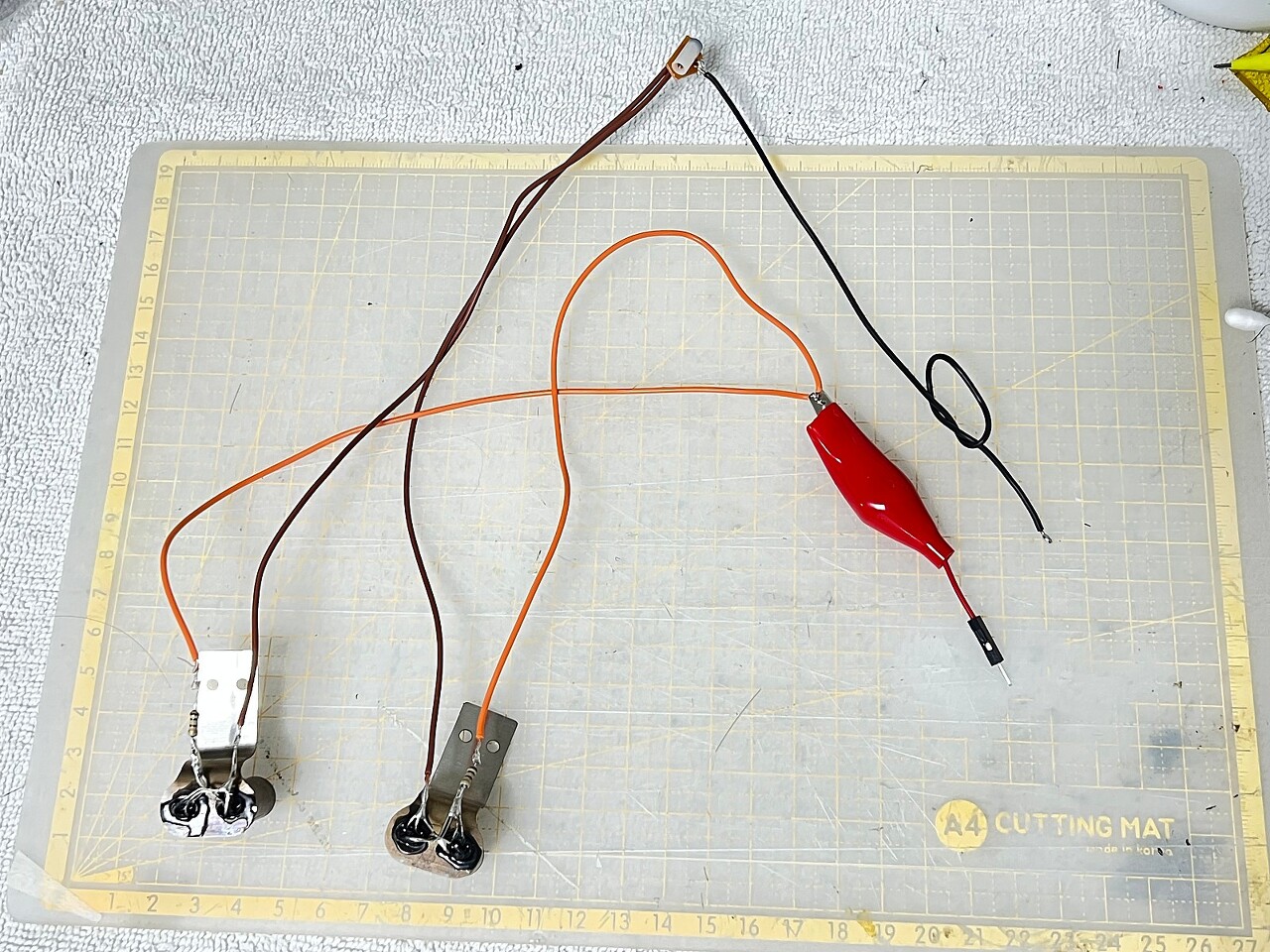
매커니즘을 확인했으니 led와 본체를 따로 분리 시켜줍니다
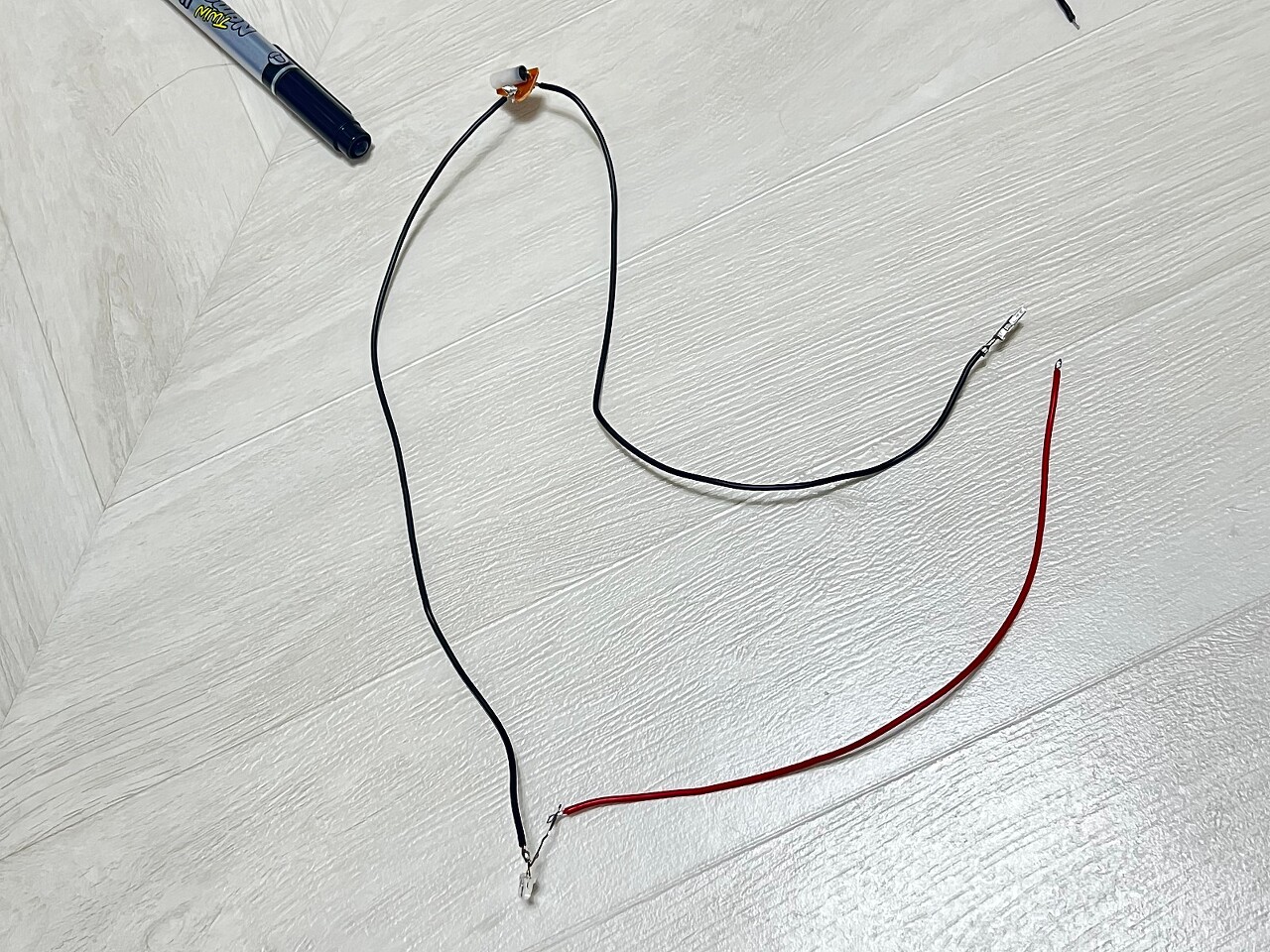
우선 이렇게 연결하고 테스트 해보니 정상작동 확인!
led를 중복으로 달꺼라 병렬연결로 선을 달고

머플러에 미리 led를 심어주고 (구멍 하나에 각각 빨강/주황led 총 8개)

led타지 말라고 저항도 달아주고(5v전원이므로 100옴)

다 연결해주면 완료!
다 되었으니 바디에 연결해서 최종 정상동작 여부를 확인해봅니다!
잘 작동해서 바로 바디 장착해주었습니다ㅎㅎ
충격을 줄때마다 번쩍번쩍✨
백파이어가 풀 스로틀에 반응하는건 아니지만
나름 비슷한 효과를 초저렴 비용으로 낼수 있는 재밌는 아이템인것 같습니다~
이상
초저렴 백파이어 자작 후기를 마칩니다~😁
'RC_Car > RC 스토리' 카테고리의 다른 글
| RC모터 턴수에 대한 고찰 (0) | 2023.08.25 |
|---|---|
| THETA RAZOR-D1 NFC셋팅 서보 앱 메뉴 설명 (0) | 2023.08.01 |
| [LiPo] RC - 리포 배터리 정보 및 이론, 관리방법 전문 (0) | 2023.07.11 |
| [RC드리프트] 레이아웃 참고용 드리프트 서킷 모음 (0) | 2023.07.06 |
| 산와(SANWA) M12S 메뉴얼(한글) (0) | 2023.06.22 |
[LiPo] RC - 리포 배터리 정보 및 이론, 관리방법 전문
배터리 소개
작동 전압이 2.7~4.2V 이며, 기준 전압은 3.7V인 배터리입니다. (HV은 최대전압 4.35V, 기준전압 3.8V)
리튬 중에서도 종류가 나누어지는데 리튬이온, 리튬 이온 폴리머(리튬 폴리머), 리튬 이온 또는 폴리머 HV (높은 전압 제품)
으로 3종류로 나누어집니다. (사실상 HV나 일반모델이나 구조는 같습니다.)
HV는 맨 아래에 자세히 소개됩니다.
리튬 이온
보통 휴대폰에 많이 쓰이는 배터리입니다.
특성은 폭발의 위험이 있으며, 방전율이 낮은편입니다. RC에서는 송수신기용, LED용도로 사용을 권장합니다.
(사실상 RC에서 쓰일 일은 잘 없는편입니다.)
리튬 이온 폴리머
보통은 리튬 폴리머라 합니다. (정식 명칭은 리튬 이온 폴리머가 맞습니다.)
휴대폰에도 사용되며, 태블릿, 노트북 등 다양한 분야에 사용됩니다. RC에도 주로 쓰이는 배터리입니다.
특성은 내부가 겔 타입으로 구성되어 안전성이 증가하였습니다. (이온 폴리머는 폭발하기보단 발화합니다.)
그리고 방전율이 높아 순간적을 높은 출력을 낼 수 있습니다.
HV타입
보통 배터리의 경우 4.2V가 최대 전압인데 HV제품들은 4.35V까지 올라가는 제품이 있습니다.
최근 스마트폰에도 보면 최대전압이 4.35V까지 올라갑니다.
전체적 구조는 일반 배터리와 동일합니다.
일반 리튬 배터리에 비해 출력이 약 10%정도 더 좋은편입니다.
자세한건 아래 설명할 예정입니다.
그 외- 리튬 페라이트(Li-Fe)
기준 전압이 3.3V이며, 보통 수신기, 송신기, LED용으로 많이 쓰이는 배터리
얘는 잘 모르겠습니다. 패스하겠습니다.
배터리 스펙
일단 리튬 폴리머에 표기된 정보를 확인합니다.
7.4V 4000mAh 35C 2S1P
7.4V는 전압입니다.
리튬은 1셀당 3.7V이고 (기준값입니다. 충전하면 4.2V까지 올라가지만, 아래에 자세히 설명하겠습니다.)
셀을 직렬로 연결하여 전압을 올립니다. 1셀은 3.7V, 2셀은 7.4V, 3셀은 11.1V, 4셀은 14.8V......
7.4V이니 2셀이라 보시면 됩니다. 여기서 2S1P가 연관이 됩니다.
S-직렬로 연결되어 있습니다. 2S면 1셀 배터리가 2개 직렬로 연결되어 있습니다.
P-병렬로 연결되어 있습니다. 1P면 병렬 연결이 없습니다.
예시로 4000mAh 7.4V 2S1P일 경우
4000mAh 3.7V + 4000mAh 3.7V = 4000mAh 7.4V (두개를 직렬 연결)
4000mAh 7.4V 2S 2P일 경우
2000mAh 3.7V +2000mAh 3.7V = 4000mAh 3.7V (두개를 병렬 연결해서 용량만 올라가고, 전압은 동일합니다.)
4000mAh 7.4V 2S2P는 위 2000mAh 3.7V 제품을 두개 병렬연결, 직렬연결하여 용량을 늘렸다고 보면 됩니다.
2000mAh 3.7V +2000mAh 3.7V = 4000mAh 3.7V
+2000mAh 3.7V +2000mAh 3.7V = 4000mAh 3.7V
=4000mAh 7.4V
즉 4000mAh 기준 2S1P와 2S2P의 구조는
2S1P는 셀이 2개 들어있고 2S2P는 4개가 들어있는 구조입니다.
셀 관리는 1P가 편합니다.
35C는 방전률을 의미합니다.
C값이 높을수록 순간적으로 낼 수 있는 출력이 큽니다. (C값이 높을수록 좋은 배터리입니다.)
제가 소지한 배터리는 4000mAh 35C입니다.
배터리의 용량과 C를 곱하면 순간적으로 쓸 수 있는 최대 출력값이 나옵니다.
4000mAh x 35C = 140,000mAh (140Ah)
그럼 순간적으로 쓸 수 있는 출력은 140A인데
저가 배터리의 경우 실 출력보다 높게 표기하여 제 출력이 안나올수 있습니다.
사용 및 관리
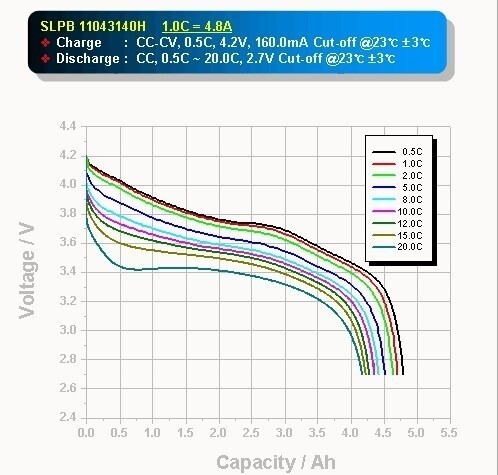
리튬 폴리머의 사용가능 전압은 2.7V~4.2V입니다.
1셀의 기준 전압은 3.7V(기준전압)입니다. 완전 충전할 경우 4.2V입니다.(HV는 제외입니다.)
하지만 실질적으로 사용가능한 전압은 최소 3.0V부터 시작됩니다. (권장은 3.2V이상입니다.)
셀 전압이 2.7V에 근접할수록 배터리의 손상이 발생합니다.
2.7V이하로 내려갔다면 셀이 죽었다고 봐도 무방합니다.
셀의 전압을 한계까지 사용하는것이 좋지 않은 이유는
리튬 계열은 +극과 -극 쇼트를 방지하기 위해 내부에 유기물로 분리막이 있습니다.
이 분리막이 사용중에 미약하게 분해된다고 합니다. 이로 인해 -극에 손상이 가해지고 수명이 줄어준다고 합니다.
배터리 사용중 100%에서 0%로 도달하는것 보다 100%에서 50%로 가는것이 손상이 적습니다.
그렇기에 리포 알람값 또는 변속기 컷을 셀당 3.6V정도로 권장합니다. (헬기 등 공중운행일 경우 값이 더 높습니다.)
그래프를 보면 3.8~3.6V에서는 천천히 내려가지만, 3.6V이하에서는 급격하게 전압이 내려갑니다.
투어링 서킷에서는 배터리 수명과 출력유지를 위해 3.7V까지 사용을 권장합니다. (HV는 3.8V)
실제로 셀 편차는 3.6~3.4V이하부터 발생하기 시작합니다.
배터리를 100%완충상태로 장기간 유지하는것은 좋지않습니다.
리튬계열의 경우 최대 전압에 도달할수록 내부 배터리의 이온들이 불안정해집니다.
불안정하다는것은 완충시 +극과 -극이 순수한 전해질로 구성됩니다. 충전시 이온이 +극에서 -극으로 이동을 합니다.(정반응)
불안정(완전충전)하면 안정화를 위해 역반응이 일어납니다. 이러한 이유로 배터리 수명에 좋지 않습니다.
장기적 보관은 스토리지 모드 또는 3.8V로 맞추어서 보관하시는게 좋습니다.
약 3일이 넘을 경우 스토리지 모드로 보관을 권장합니다.
(※투어링 서킷 유저들의 경우 배터리 수명을 위해 서킷에 도착한 뒤 바로 충전하여 사용합니다.)
그리고 100% 충전후 보관하는곳의 온도차가 클 경우
충전했던 장소와 보관하는 장소의 온도차가 다를 경우입니다.
예시를 들면 겨울철 실외 -10도에서 배터리를 완전충전 했다고 가정합니다.
그리고 실내 (20도)에서 보관을 할 경우 배터리의 전압이 증가 또는 감소되어 배터리가 손상될 수 있습니다.
(참고로 리튬계열은 온도가 낮으면 효율이 소폭 감소합니다.)
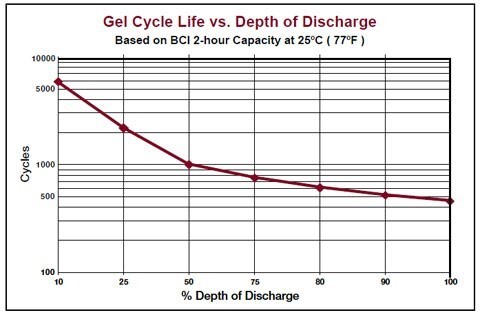
리튬 배터리의 수명은 대략 500cycle입니다.
1사이클은 1번 사용 기준이 아니라 100%에서 0%로 가는것을 1사이클입니다.
사용방법에 따라 다르지만 평균적으로 500회에 가까울수록 용량이 감소합니다.
※평균 수명이 500회입니다. RC의 경우 극한까지 출력을 내다보니, 수명이 짧은편입니다.
험하게 사용한다면, 수명이 150회 이하일 수도 있습니다.
배터리 종류 소개
규격으로 보면...
1:10급 2셀 배터리는 규격화 되어있습니다. 3종류의 제품이 나옵니다. (하드팩 기준입니다.)
일반팩
138 x 47 x 25mm (가로 x 세로 x 높이) 의 크기입니다.
가장 기본적이고, 범용적인 크기의 배터리입니다.
새들팩
69 x 47 x 25mm의 크기인데, 1개(1셀) 기준입니다.
보통 2개에 1셋트입니다. 예전 1:10급 버기에 많이 사용했던 배터리입니다. 최근에는 거의 안쓰입니다.
두개를 이어붙이면 일반팩과 크기가 동일합니다.
숏티팩
96 x 47x 25 mm 의 크기입니다.
일반팩에 비해 약간 짧으며, 보통 1:10급 차량에 많이 사용됩니다.
사용되는 차량은...1:12급 팬카, 1:10급 F1, 드리프트, 버기에 많이 사용됩니다.
배터리의 세대 발전
리튬 배터리가 보급된 이후, 리튬배터리도 순차적으로 발달되었습니다.
1세대
1세대형 배터리는 두께가 25mm 정도 됩니다.
최근에도 25mm정도의 배터리가 출시되긴 합니다. 25mm 두께의 배터리는 2가지 종류인데...
저가형 배터리이거나, 1:8급에 사용되는 고용량 배터리입니다.
Sunpadow에서 최근 나온 배터리는 두께가 25.1mm인데, 용량이 8400mah입니다.
사진상의 왼쪽배터리가 1세대형(25mm)배터리입니다. 중간, 오른쪽 배터리는 2세대형입니다.
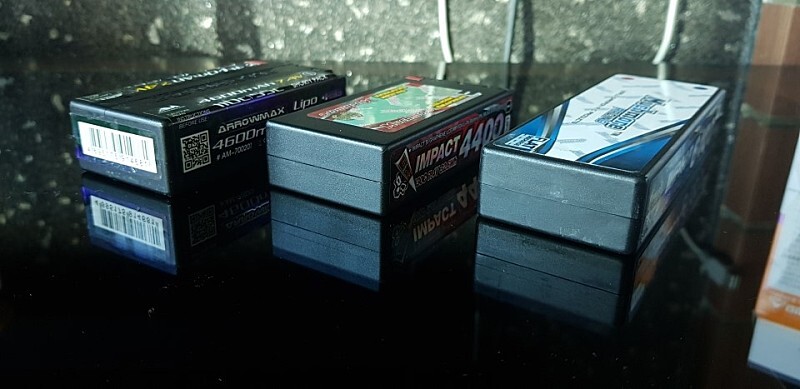
2세대
배터리가 얇아졌습니다. 두께가 25mm 이지만, 22.5mm으로 줄어들었습니다.
투어링의 트랜드가 저중심, 경량화인데 이에 맞춰 배터리도 가벼워졌고 얇아졌습니다.
보통 LCG (Low Center Graivty)라 부릅니다.

3세대 HV 배터리
윗 사진상의 오른쪽 배터리입니다. 두께도 얇습니다. 22.5mm
일반 배터리에 비해 사용전압이 약간 증가하였습니다. (3.8V)
완전충전시 셀당 4.35V까지 올라가며, 투어링에서는 셀당 3.8V까지 사용을 권장합니다.
스토리지 모드 또한 셀당 3.8V 정도로 맞추시면 됩니다.
충전기에서 Li-HV모드를 지원해야 사용가능합니다.
일반배터리와 사용법은 크게 차이가 없으나, 사용가능한 전압값이 약간 높아졌다고 보면 됩니다.
전압이 높아진 만큼 컷오프 전압도 올랐습니다. 2세대 배터리에 비해 용량은 크게 오르지 않았습니다.
출력의 경우 약 10%정도 증가되었습니다. 투어링의 경우 완충 후 5바퀴 정도는 일반배터리에 비해
더 빠르게 치고나갑니다. 일부 HV 배터리는 커넥터가 5mm을 사용합니다.

4세대 배터리
앞으로 나올 배터리 입니다. 실리콘 그래핀이 적용된 배터리입니다.
현재 Muchmore와 Arrowmax의 제품만 나온거로 알고있습니다.
실리콘 그래핀을 적용하여 배터리 내구성과 출력을 향상시킨 배터리입니다.
이 배터리 또한 기본적으로 저중심 배터리 (22.5mm) 이며, HV배터리 또한 제작됩니다.
(막상 실리콘 배터리 사고나니, 실리콘 배터리가 적용된 HV 배터리가 구매한지 1주일 후 출시됬네요 ㅠㅠ)
※HV가 아닌 배터리가 출시되는 이유는 대회용입니다. 아직까지 투어링, 버기 대회에서
HV를 허용하지 않는 대회도 있습니다.
이외 다른점은 아주 얇은 배터리가 나옵니다. Muchmore에서는 SLCG라 부릅니다.
HV이고, 실리콘 그래핀이 적용되었지만 두께가 19mm정도로 더욱 얇아졌습니다.
하지만 얇게 만들다보니 용량은 6000mah를 넘기지 못합니다.
22.5mm에 HV, 실리콘 그래핀이 적용된 배터리는 6000mah 이상 배터리도 있습니다.
요약하면
이렇게 가장 최신배터리까지 소개가 다 끝났네요. 모든 정보를 간단히 요약하자면...
1. 배터리는 100% 또는 0%에 근접할수록 배터리가 손상됩니다..
2. 배터리 사용권장량은 셀당 3.6V까지 입니다.. (HV는 3.8V)
3. 배터리는 3.7~3.8V 상태에서 보관하는게 좋습니다.
4. 수명을 중요시 한다면 미리 충전하지 마시고, 서킷에 와서 충전후 사용을 권장합니다.
5. 충전 후 가급적 빠른 시간 내 사용을 권장합니다.
6. 주행 후 바로 충전은 수명을 단축시킵니다. 배터리를 식힌 뒤 충전하세요. (특히 더운날에 더 심합니다.)
[출처] 리튬 배터리 정보 및 이론, 관리방법 전문 (드리프트 클럽 [ Korea Rc Drift Club ]) | 작성자 한상민96
'RC_Car > RC 스토리' 카테고리의 다른 글
| THETA RAZOR-D1 NFC셋팅 서보 앱 메뉴 설명 (0) | 2023.08.01 |
|---|---|
| 초저렴 백파이어 제작 후기(단돈 1$) (0) | 2023.07.19 |
| [RC드리프트] 레이아웃 참고용 드리프트 서킷 모음 (0) | 2023.07.06 |
| 산와(SANWA) M12S 메뉴얼(한글) (0) | 2023.06.22 |
| [RC] 변속기 / 조종기 중립셋팅 방법 모음 (아큐반스, 요코모, 성지, 산와, 하비윙) (0) | 2023.06.15 |
[RC드리프트] 레이아웃 참고용 드리프트 서킷 모음
드리프트 서킷 레이아웃 참고용을 모아봤습니다
현재 운영중인 국내 1:10 드리프트 RC서킷의 레이아웃을 위주로 골라봤습니다.
사진은 네이버카페 드리프트클럽에서 해당 서킷의 소개글에 포함된 사진을 퍼온것으로 각 사진에 대한 저작권 또는 소유권은 각 서킷에 있습니다.
사진 등록으로 인해 문제가 발생할 경우 즉시 삭제조치 하겠습니다.
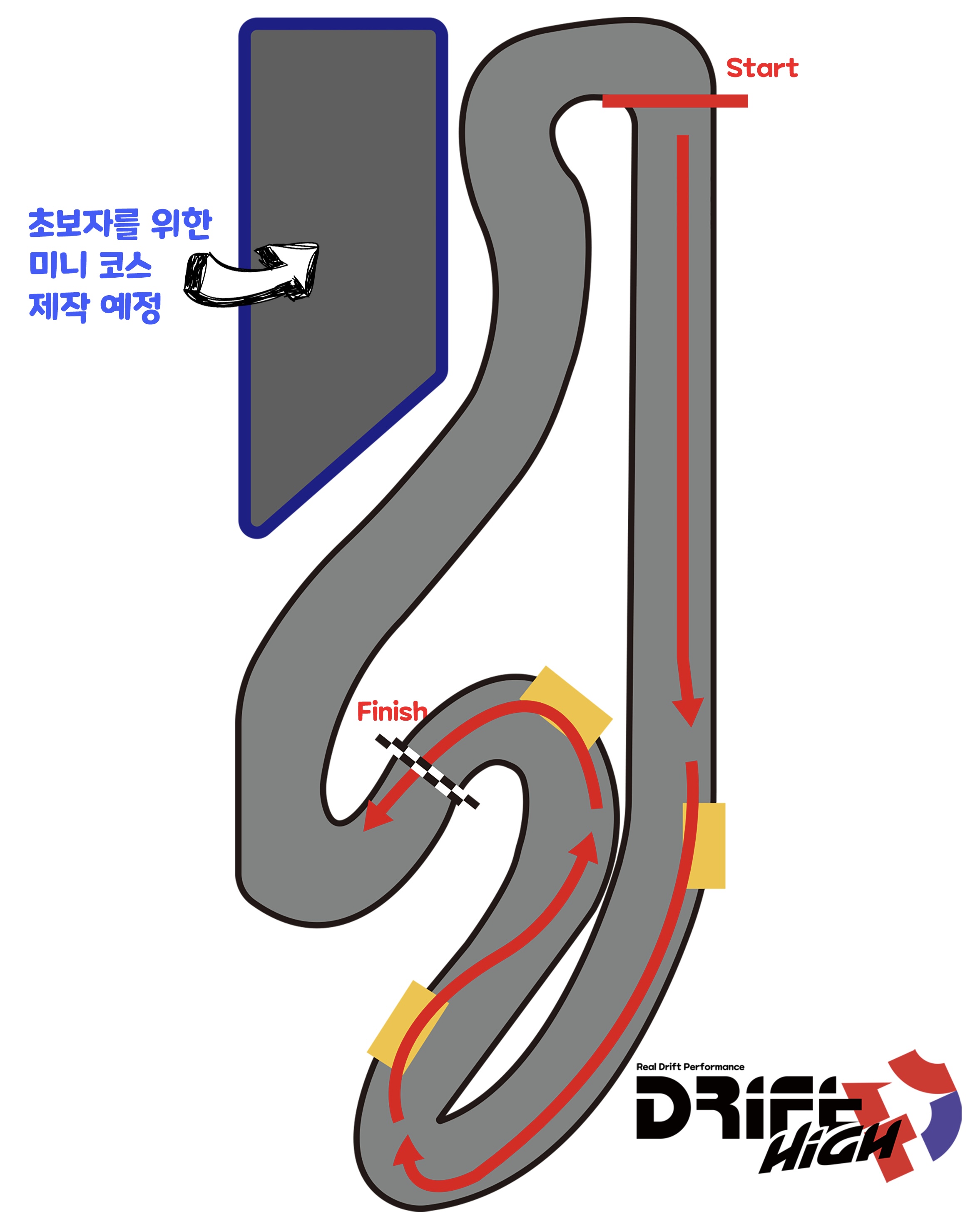
1. 인천 - 드리프트하이 서킷

2. 용인 - 행루즈 서킷

3. 대구 - TDF 서킷

4. 평택 - 디크루 서킷

5. 평택 - 시크릿베이스 코리아 서킷

6. 창원 - DDR서킷

7. 광주 - DP서킷(미니 드리프트)

8. 인천 RP 서킷 (운영종료)



----------기타----------
1. 2023 KDC(Korea Drift RC Challenge) 대회용 서킷
2. 미도회 서킷
3. 미국서킷

8. 일본 서킷



출처 : 구글맵 캡쳐
'RC_Car > RC 스토리' 카테고리의 다른 글
| 초저렴 백파이어 제작 후기(단돈 1$) (0) | 2023.07.19 |
|---|---|
| [LiPo] RC - 리포 배터리 정보 및 이론, 관리방법 전문 (0) | 2023.07.11 |
| 산와(SANWA) M12S 메뉴얼(한글) (0) | 2023.06.22 |
| [RC] 변속기 / 조종기 중립셋팅 방법 모음 (아큐반스, 요코모, 성지, 산와, 하비윙) (0) | 2023.06.15 |
| 3D Print Drift car (0) | 2023.06.13 |
산와(SANWA) M12S 메뉴얼(한글)
산와(SANWA) M12 메뉴얼(한글) 다운로드

산와(SANWA) M12-RS 메뉴얼(한글) 다운로드
산와 공식 홈페이지
https://sanwa-denshi.com/rc/car/propo/m12s.html
SANWA
[New Features] ●Telemetry Mixing ●Template function●Enhanced Vibrator functions●Additional back light color●Mode change●Throttle slow function●Li-Fe Battery●Earphone Jack●Response mode LED indicator●Ackerman ST●Racing Mode●Timer/Ala
sanwa-denshi.com
※ M12S 와 M12RS는 다릅니다. RS는 전용 메뉴얼이 따로 있습니다.
M12RS 한글 메뉴얼은
https://kernzeroid.tistory.com/65
를 참고하세요!
'RC_Car > RC 스토리' 카테고리의 다른 글
| [LiPo] RC - 리포 배터리 정보 및 이론, 관리방법 전문 (0) | 2023.07.11 |
|---|---|
| [RC드리프트] 레이아웃 참고용 드리프트 서킷 모음 (0) | 2023.07.06 |
| [RC] 변속기 / 조종기 중립셋팅 방법 모음 (아큐반스, 요코모, 성지, 산와, 하비윙) (0) | 2023.06.15 |
| 3D Print Drift car (0) | 2023.06.13 |
| SKYRC T100 충전기 매뉴얼(영문) (0) | 2023.05.25 |