3RONCO 조립기 8
- 바디조립 1st (첫번째)
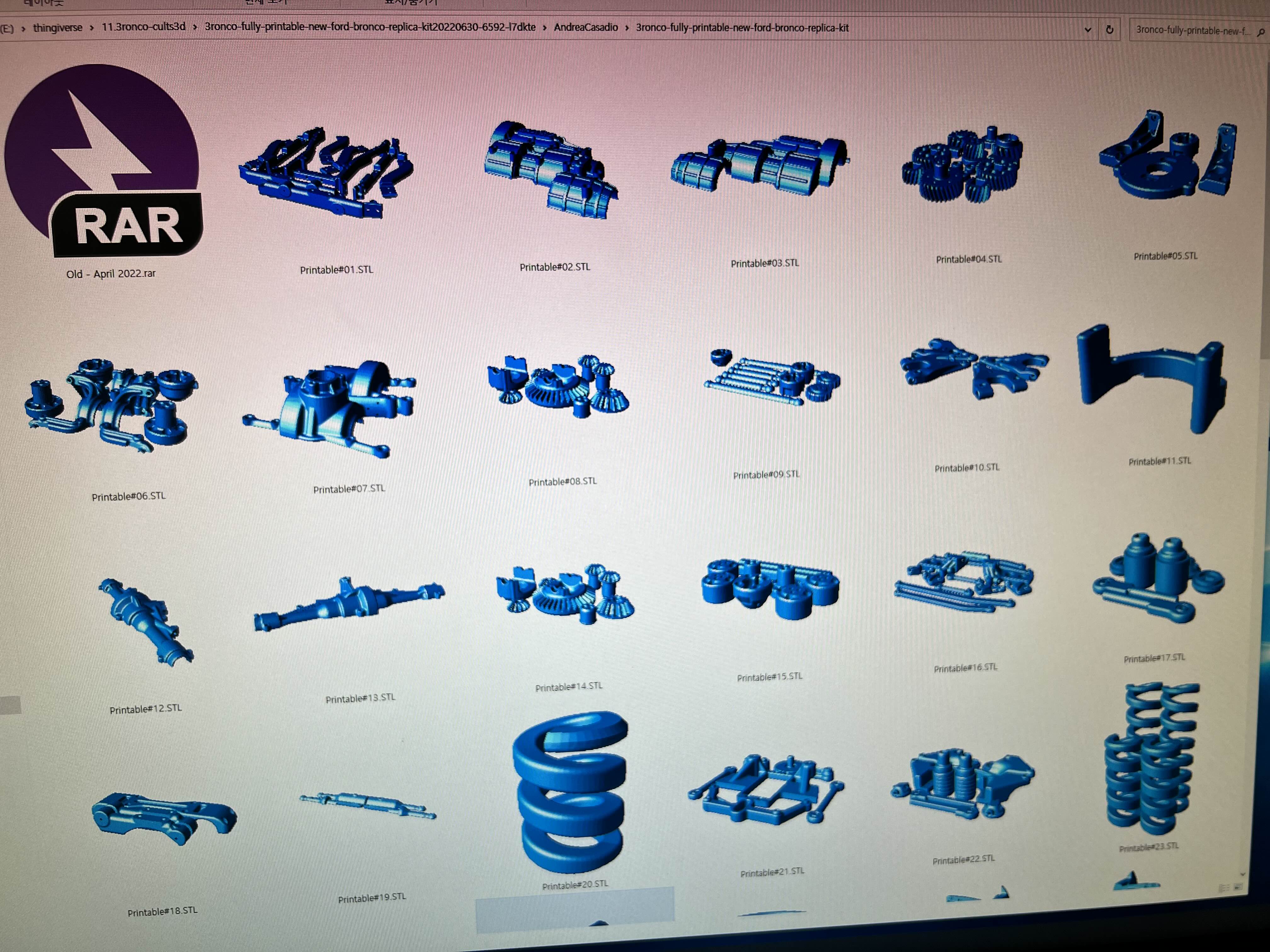
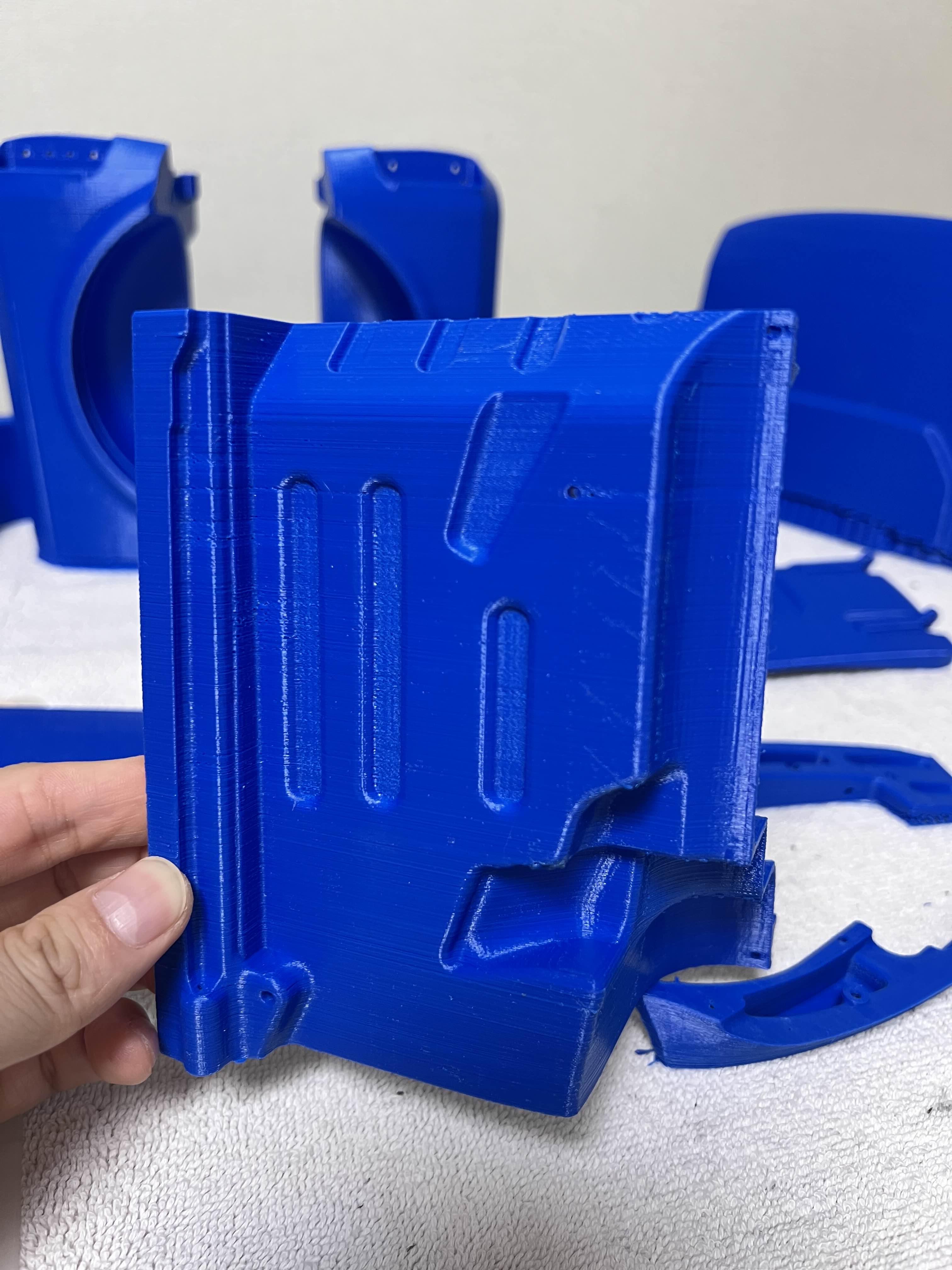
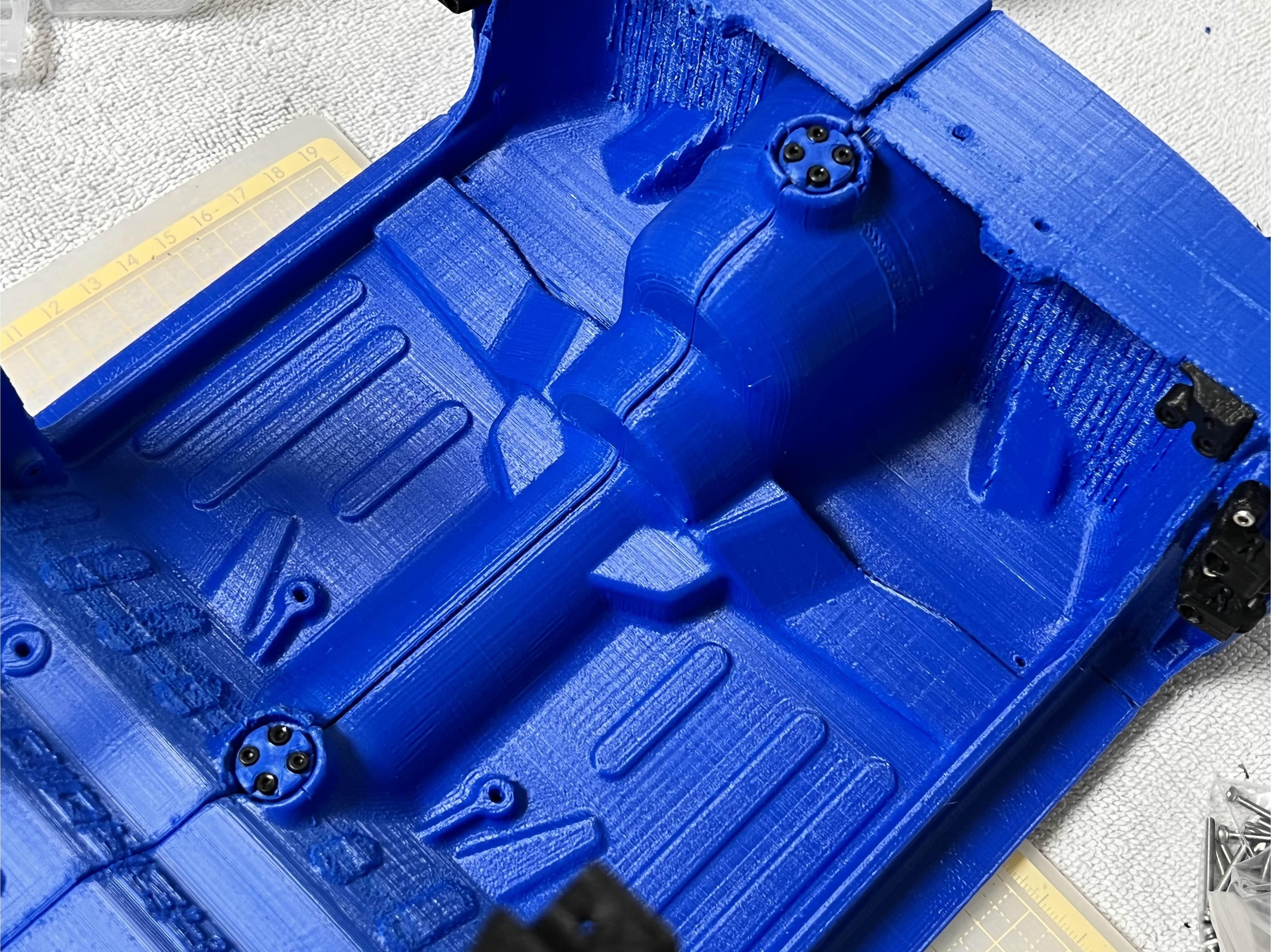
3롱코의 바디는 파란색으로 정했습니다
프린터로 한참 일을시켜 출력된 파츠들

우선 갖 출력되어져 나온 파츠는 아래 사진과 같이 서포터(지지대)포함 불필요한 노즐 똥같은 것들이 많이 달려있습니다
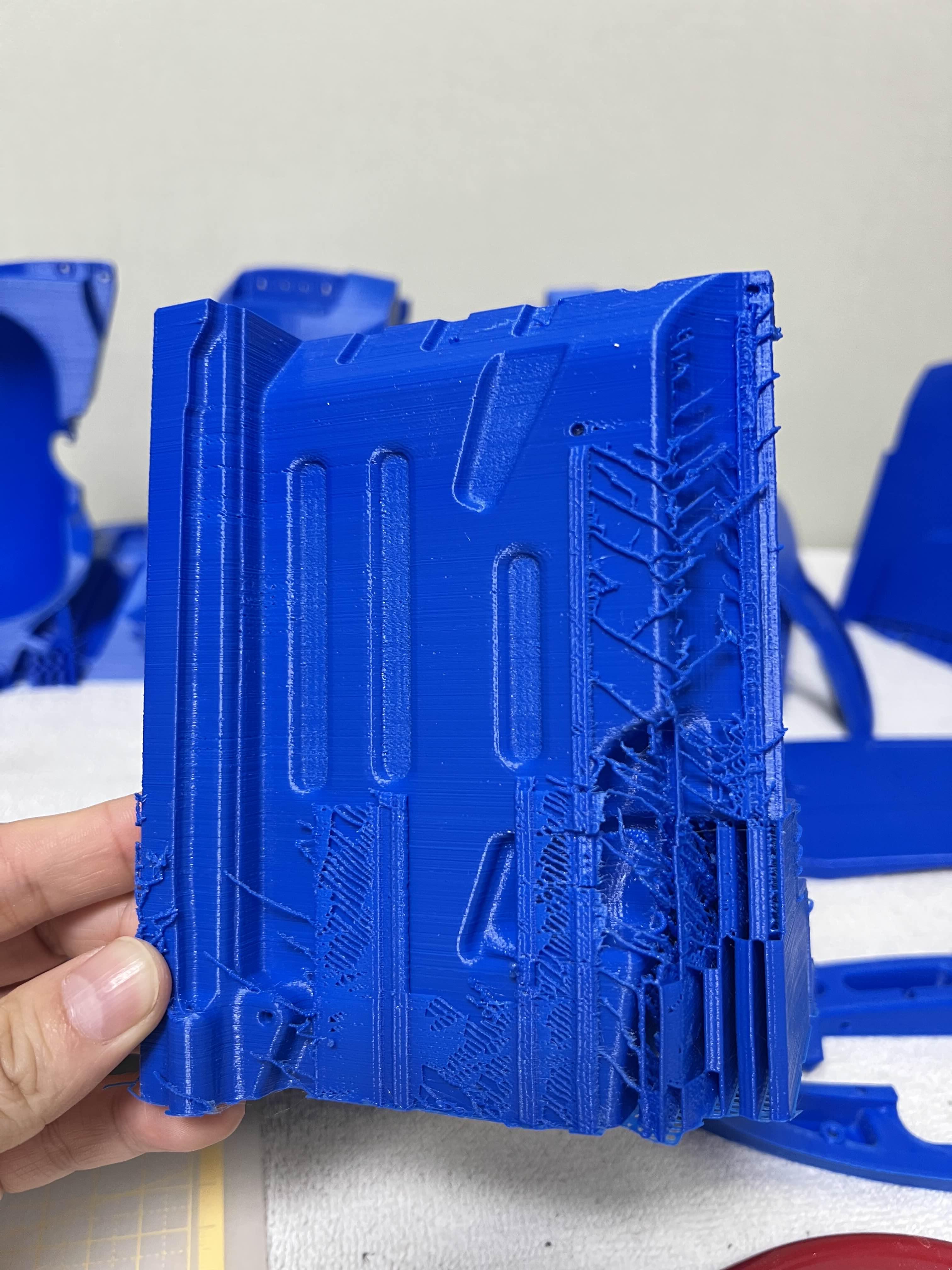
니퍼와 디버링툴, 아트나이프 등의 도구로 말끔히 제거하는게 꼭 필요합니다
이런...;;
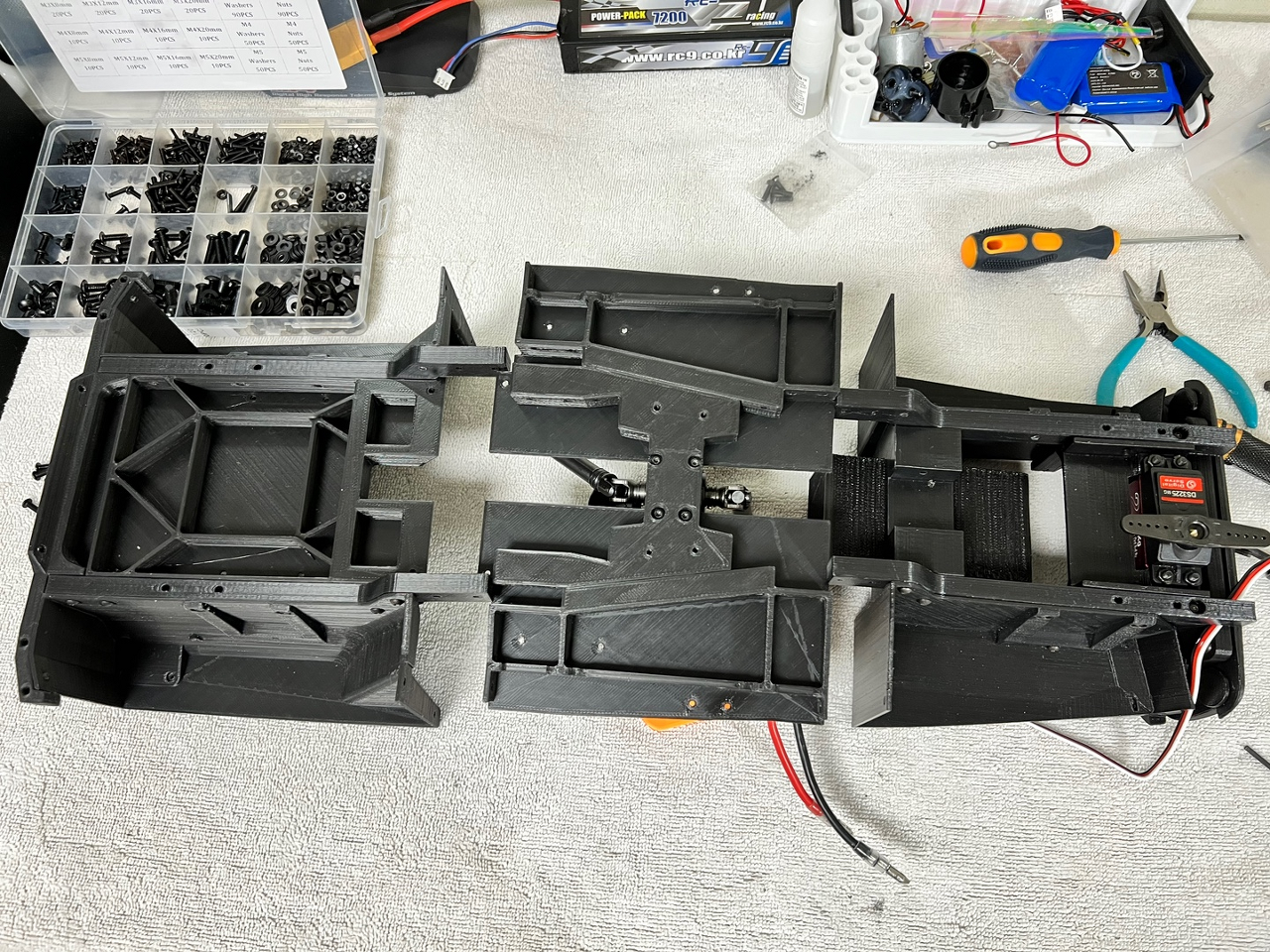
짧은 크기의 M2 나사(볼트)가 바닥을 보이기 시작합니다 볼트가 없으면 조립을 할 수 없기에 서둘러 인근 오프라인 볼트매장으로 가서 소량을 요구하니, 소량은 판매가 안되고 한팩을 통으로 구매를 해야한답니다.
조립에 필요한 볼트는 길이별 6가지 종류 약 150개씩인데
한팩은 1000개(한팩당 4만5천원*6팩=27만원?!)
뭐 사놓으면 언젠간 두고두고 쓰겠지만, 그래도 이건 아니것같아
고민끝에 오프라인 구매를 포기하고 온라인샵을 검색하니 역시 소량 판매도하네요! 바로 주문해서 받았습니다

케이스에 들어있는 볼트는 기존에 보유하고 있던 것들,
아래 지퍼팩에 든 볼트가 새로 구입한 볼트인데, 모두 검정색 스틸로 주문했지만 재고 부족으로 3종류는 스댕으로 보내줬네요
볼트의 색은 크게 중요하지 않으므로 스킵.
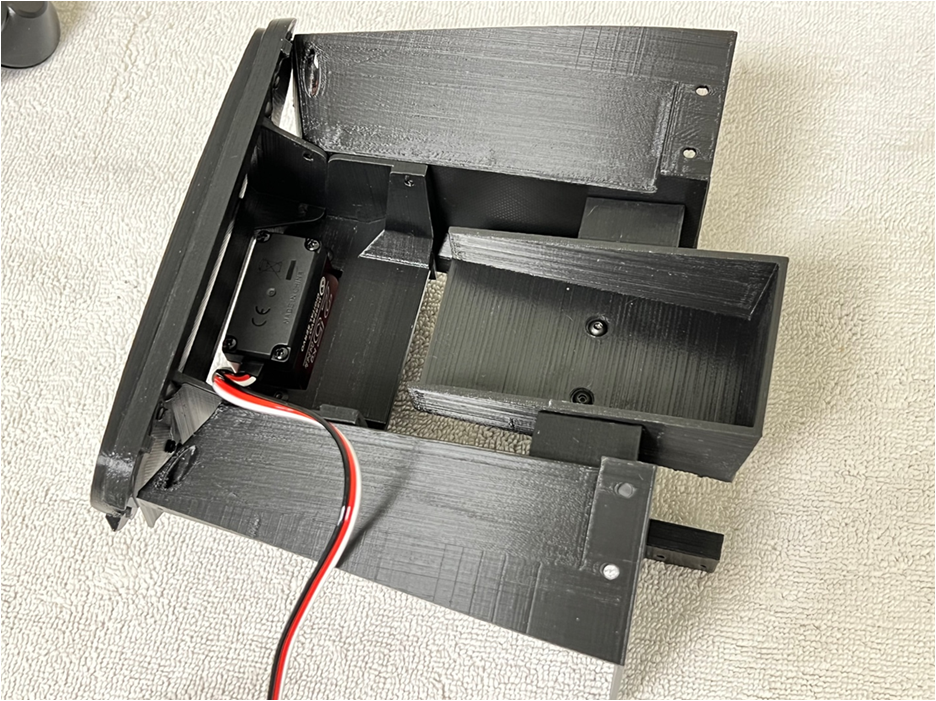
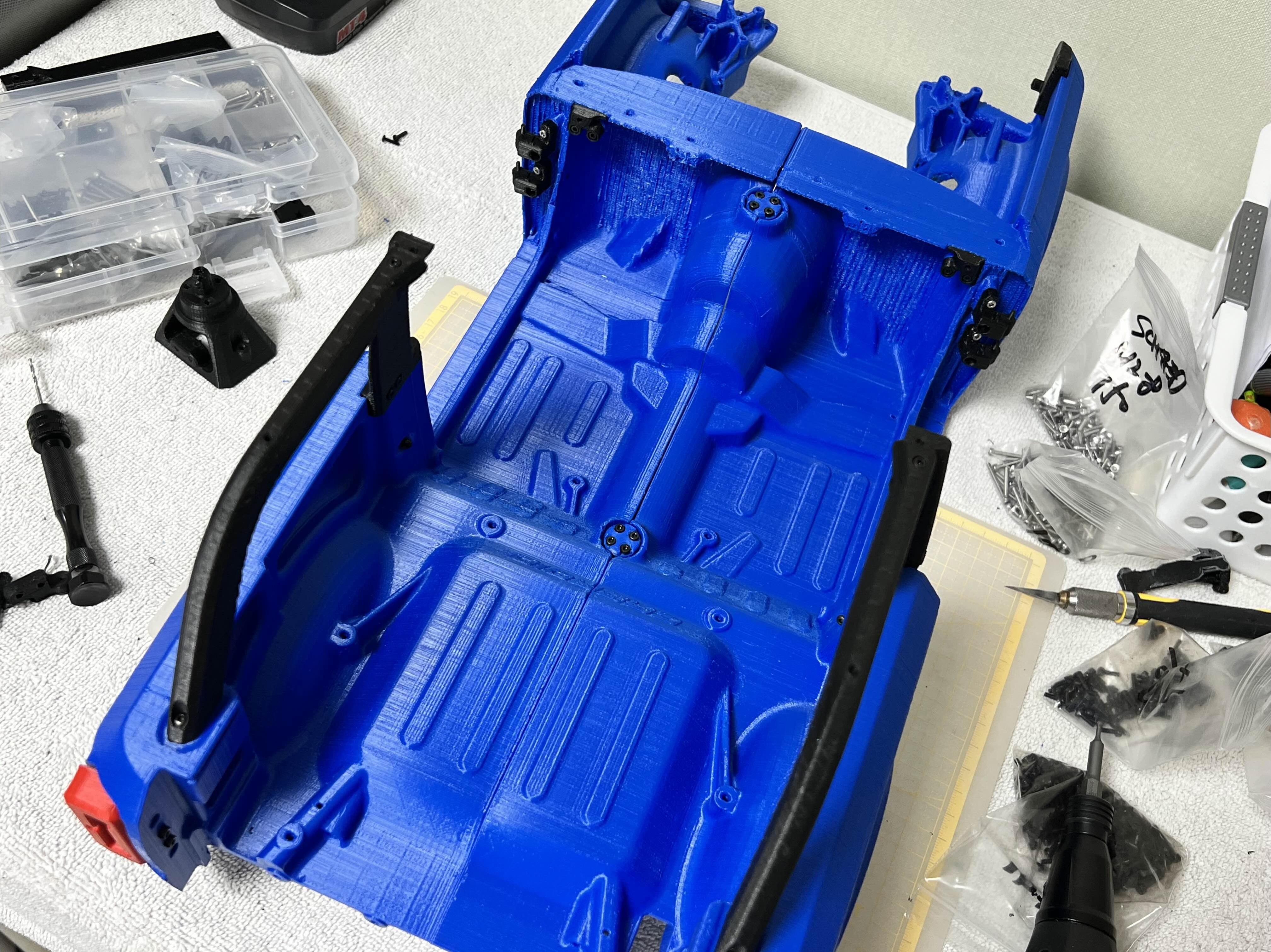
바디 파츠를 임시로 대서 각을 재봅니다

차량 문이 장착될 힌지를 달아주고

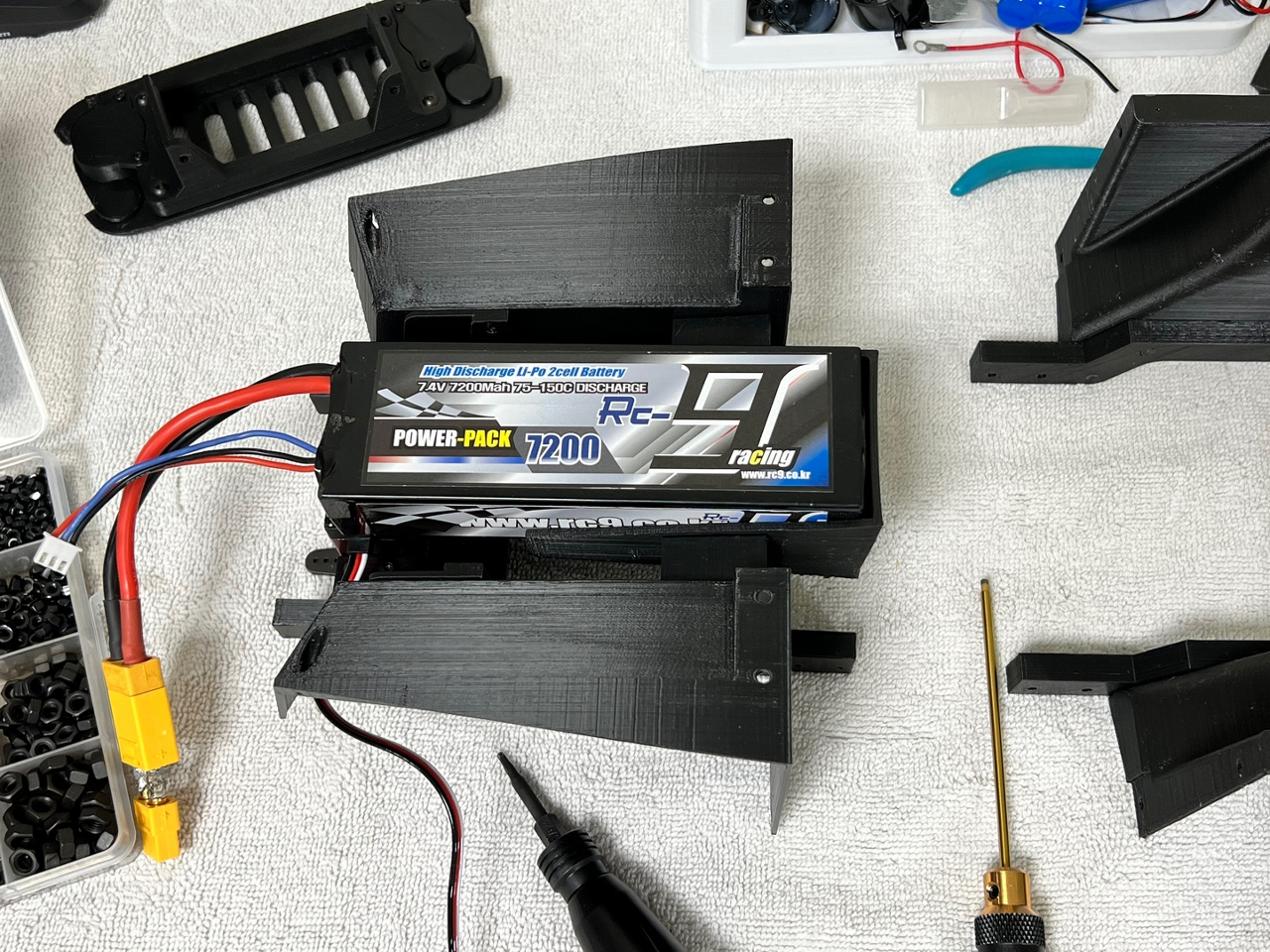
반으로 갈린 왼쪽 오른쪽을 맞대어 연결해봅니다

좌우 연결은 M&M 초코볼 크기의 연결 부품으로 결합합니다
결합 완료
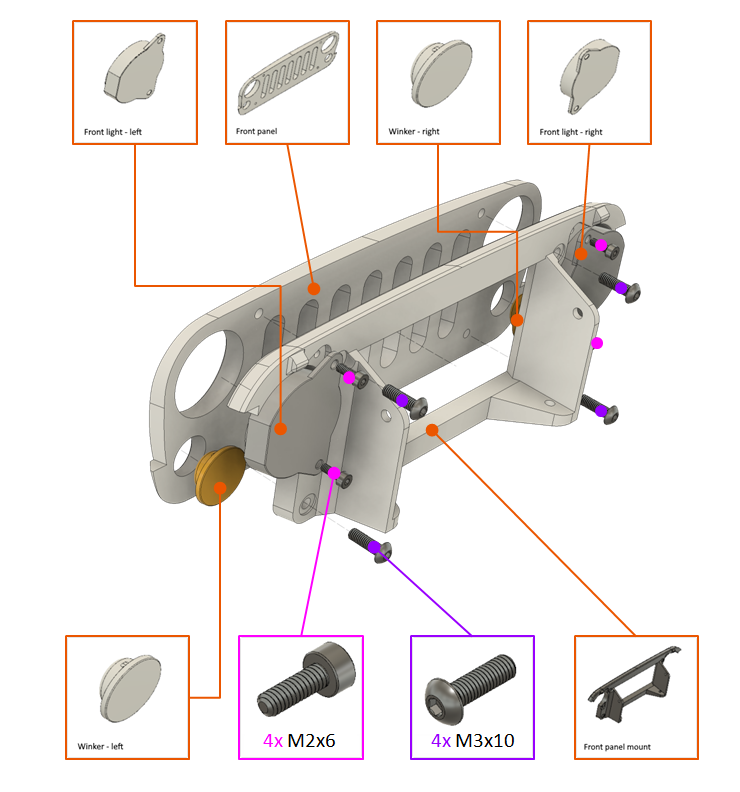
앞범퍼도 달아줘야겠죠
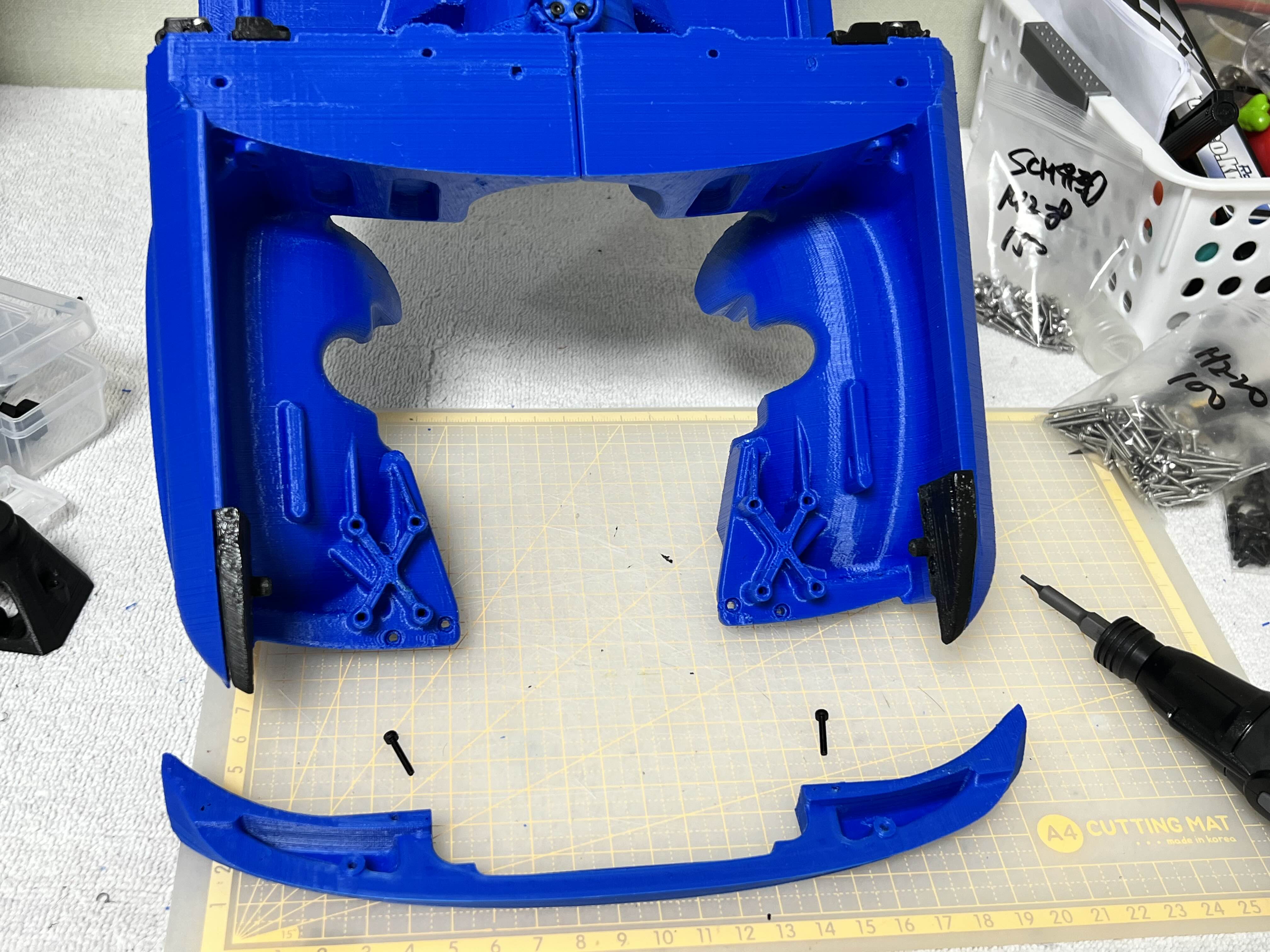
범퍼 장착 완료
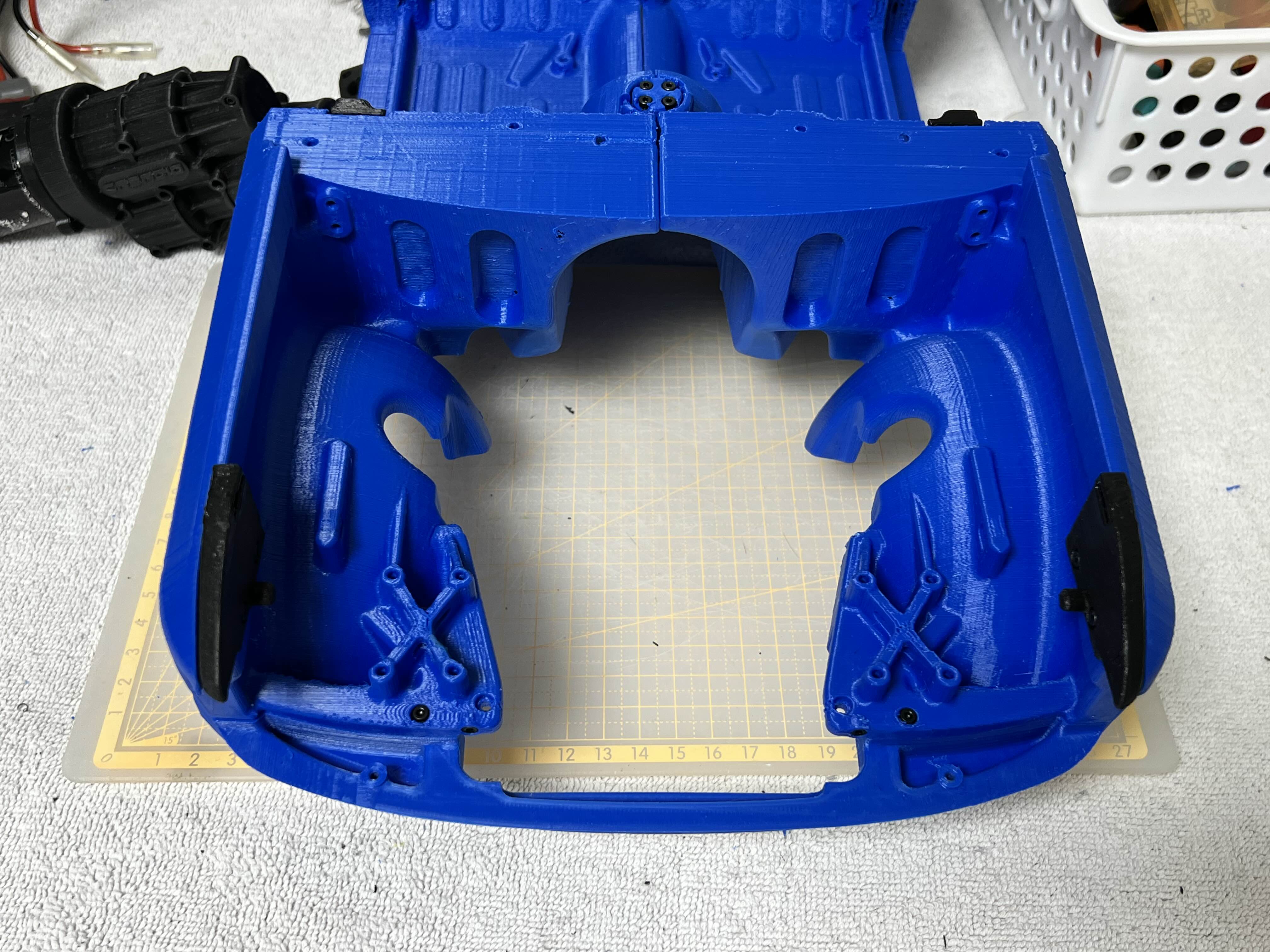
전체적인 외관 즉 익스테리어가 얼추 완성이 되었습니다
대략 크기를 보니 1/8사이즈의 크기를 실감케 합니다
기존 랭글러는 1/10이었는데 체감상 상당히 크게 느껴지네요
다음글에는 이어서 보닛과 각 도어, 인테리어를 장착시켜보겠습니다
'3D_Print > [RC카] 포드 브롱코 제작기_Bronco' 카테고리의 다른 글
| [3D프린터] 3RONCO 브롱코 제작기 - 10 - 바디조립 3rd (2) | 2022.11.23 |
|---|---|
| [3D프린터] 3RONCO 브롱코 제작기 - 9 - 바디조립 2nd (0) | 2022.11.17 |
| [3D프린터] 3RONCO 브롱코 제작기 - 7 - 휠타이어 장착 및 주행테스트 (0) | 2022.11.12 |
| [3D프린터] 3RONCO 브롱코 제작기 - 6 - 샷시에 기어박스/액슬/쇽/서보 장착 (1) | 2022.11.03 |
| [3D프린터] 3RONCO 브롱코 제작기 - 5 - 리어액슬 조립 (0) | 2022.11.01 |