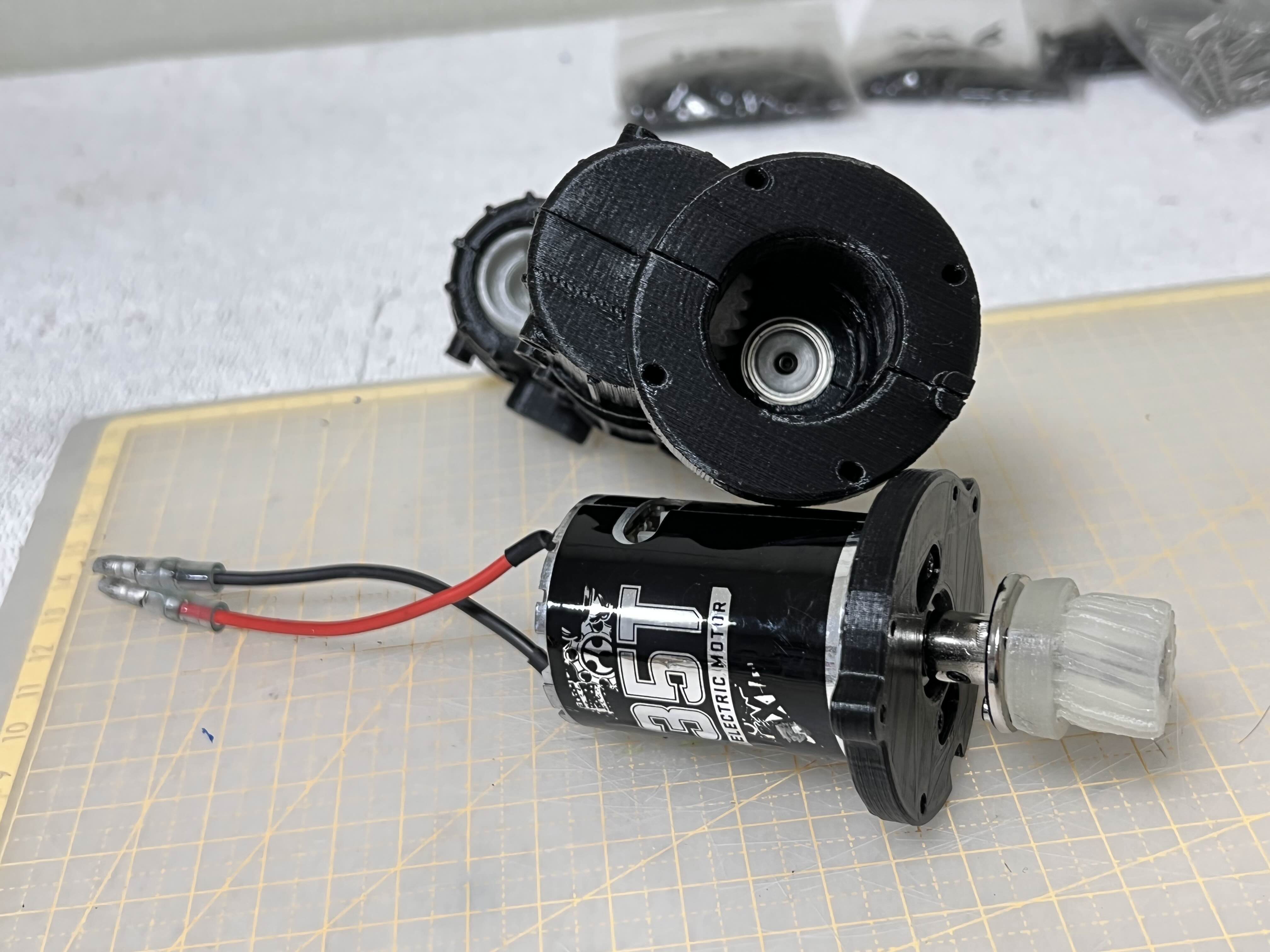
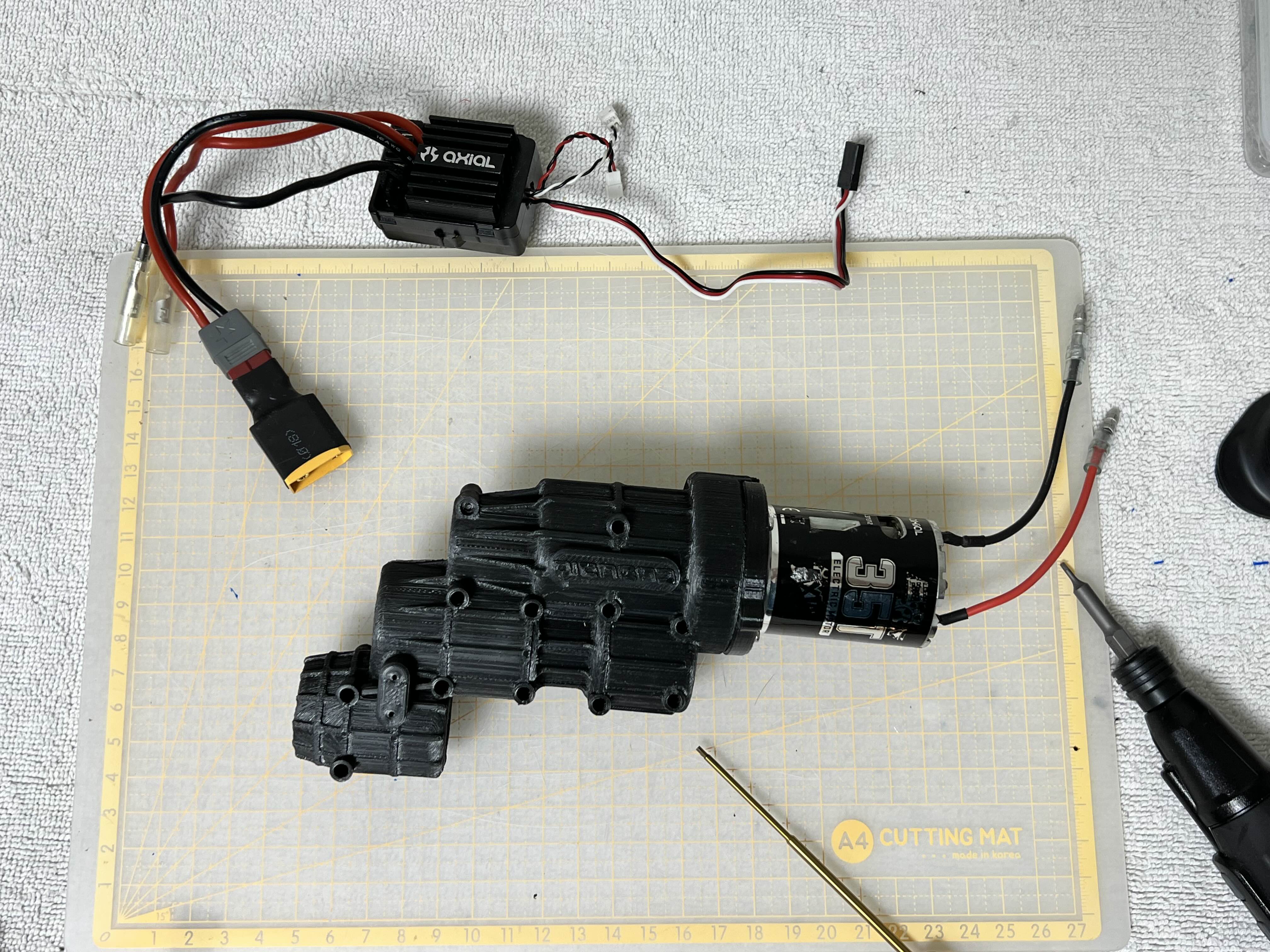
컨제입니다.
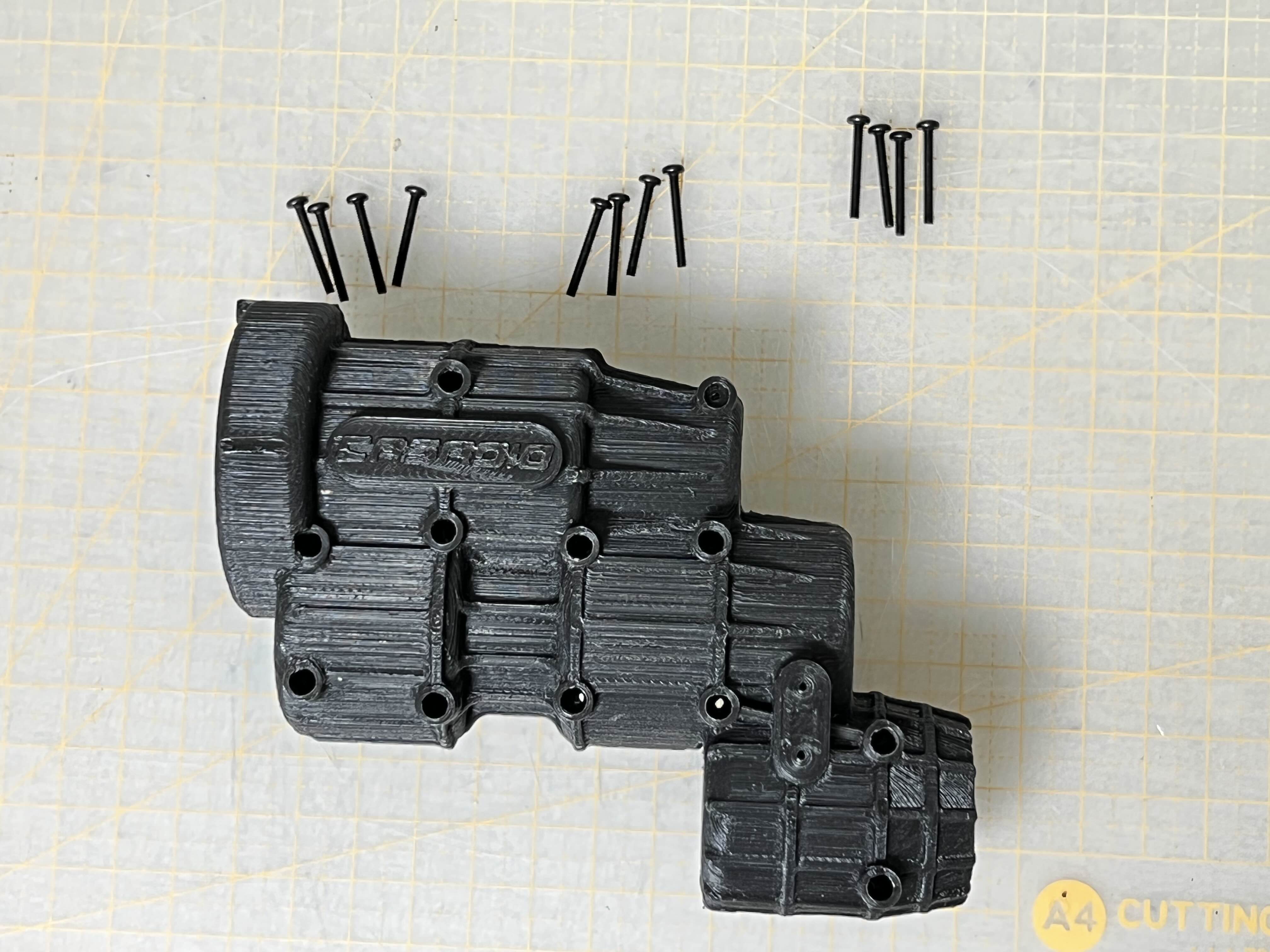
기어박스+모터 연결에 이어 링크로드로 차량을 완성시켜 보도록 하겠습니다.
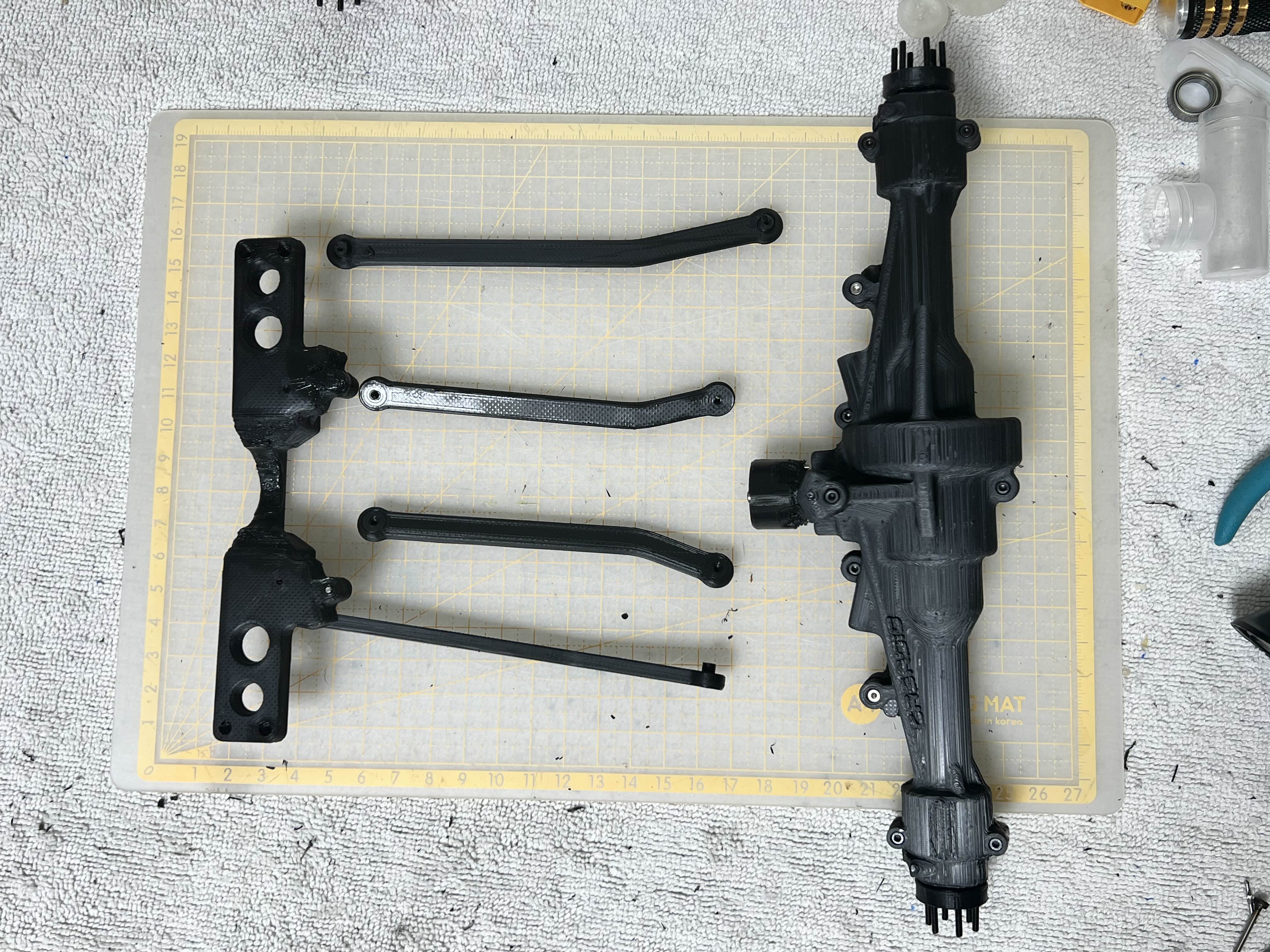
우선 샷시 구매시 옵션으로 추가하여 구매한 전용 링크로드가 있습니다.

헌데, 길이가 긴건 동일한 길이인데
짧은 로드는 길이가 제각각이군요 😕
판매 페이지에 설명은 역시나 없고, 뭐 알아서 용도에 맞춰 쓰기로 합니다.
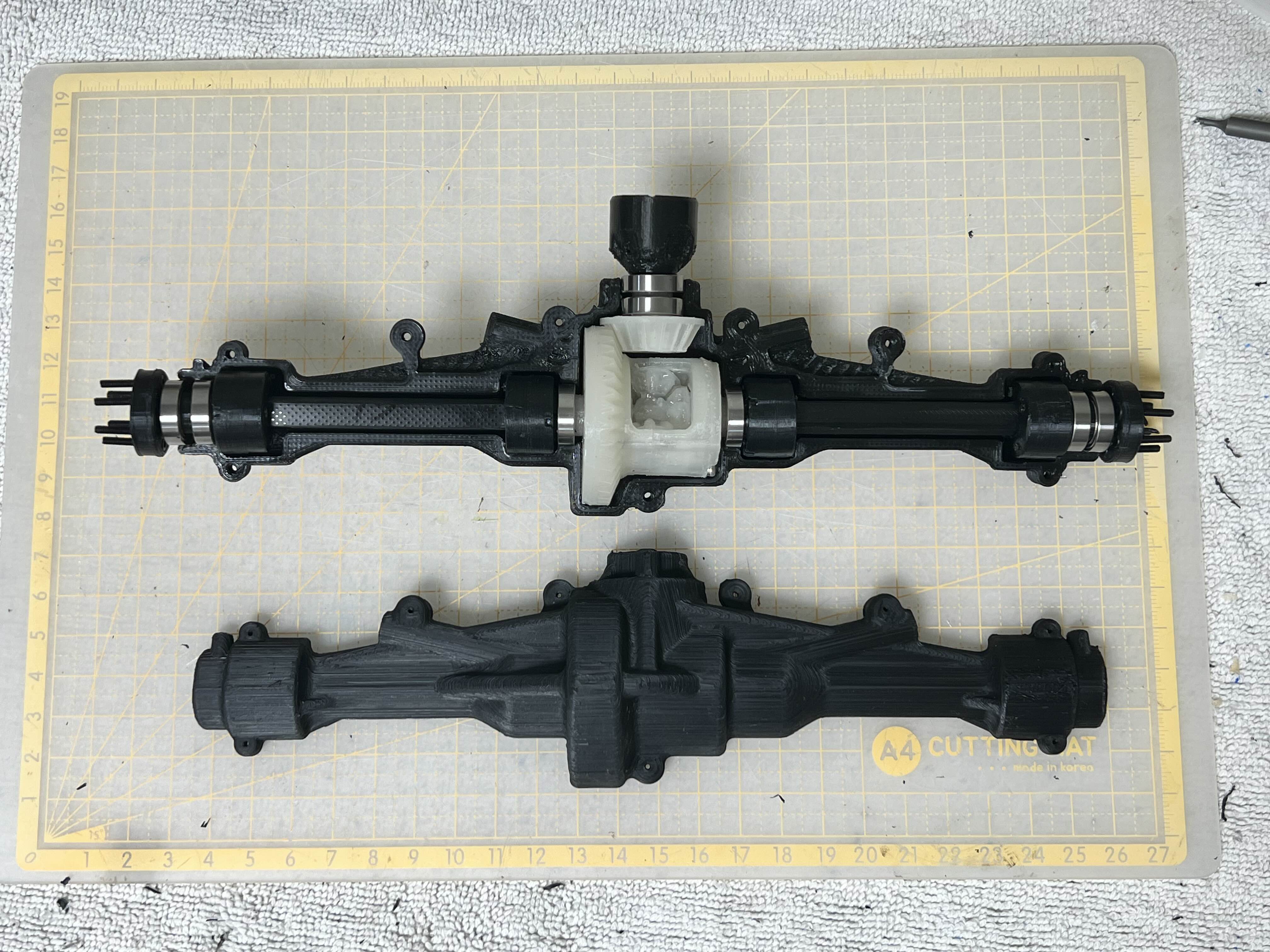
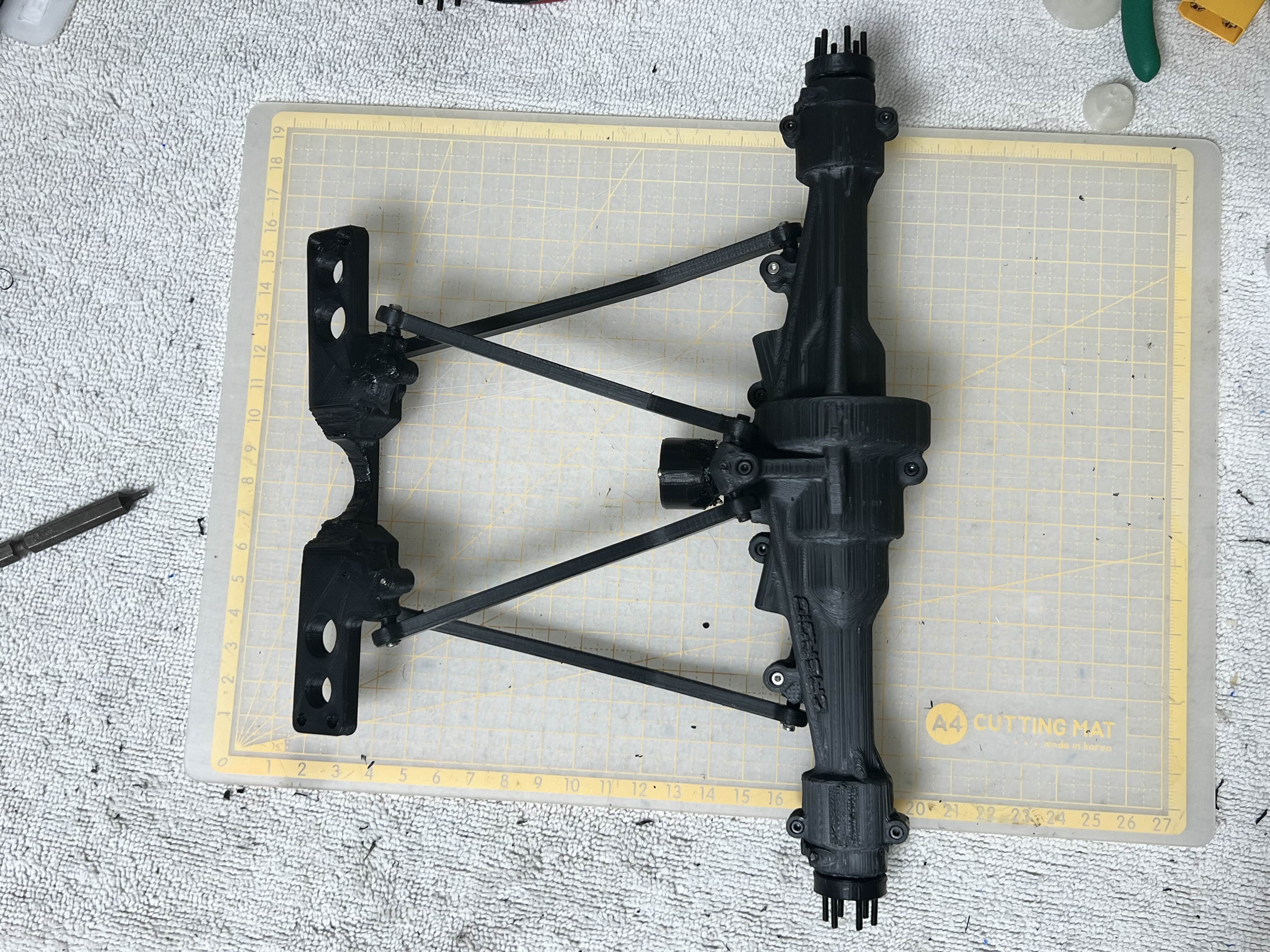
우선 리어쪽 링크로드를 연결해봅니다.
각이 져 있는 바위를 공략할 경우 배 걸림을 최소화 하기 위해 밴딩처리가 되어있는 부분을 신경써서 위치를 잡고
로드엔드를 체결해 각을 잡아줍니다.
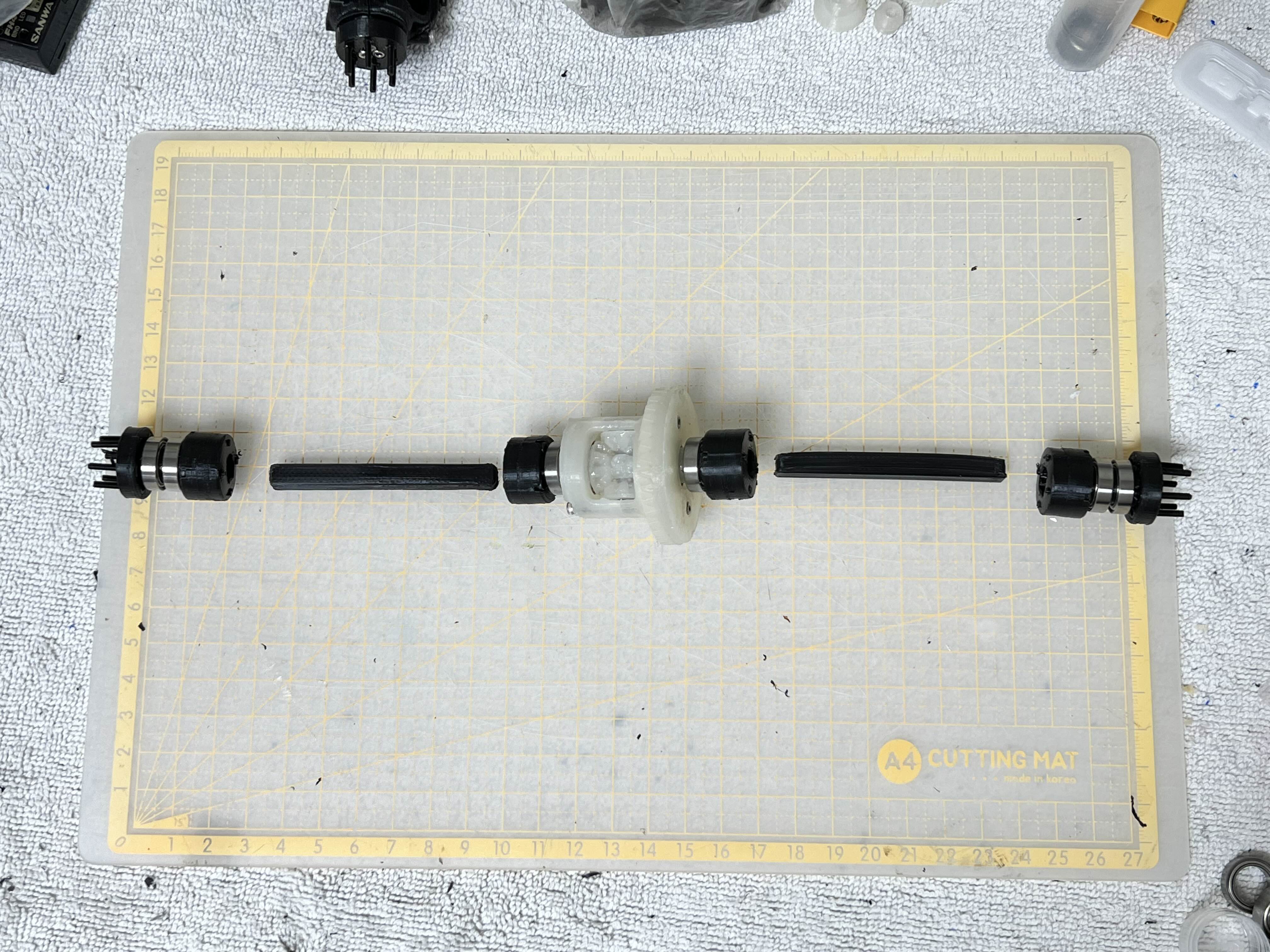
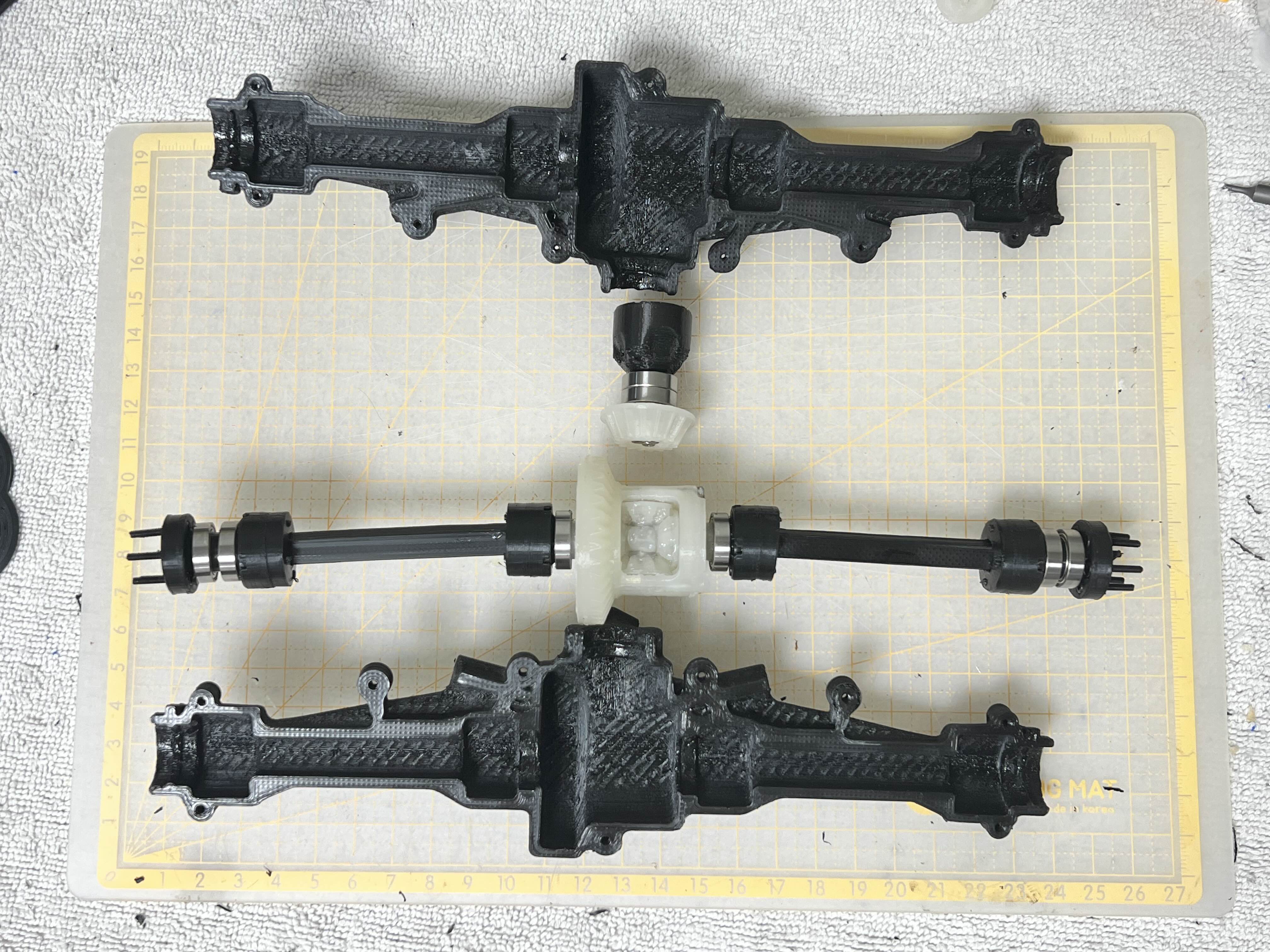
드라이브샤프트를 기어박스와 리어액슬과 연결해서 최종 연결을 해줍니다.
이 로드 연결로 차량의 휠베이스(Wheel base)가 결정되는데, 연결전 시뮬레이션 해봤을때 약 340mm 정도가 나왔습니다.
일반적인 1:10 트라이얼 차량의 국민 휠베 길이는 313mm인거에 비하면 상당히 긴편에 속하는데, 선택한 액슬이 카프라용 액슬이고 너비 자체가 넓어 그에 비례로 휠베도 같이 길어지게 셋팅해보기로 합니다.
포털엑슬 + 긴 휠베가 크롤링시 좀더 유리할 수 있기 때문입니다.
리어는 다 되었고, 중요한 프론트가 남았습니다.
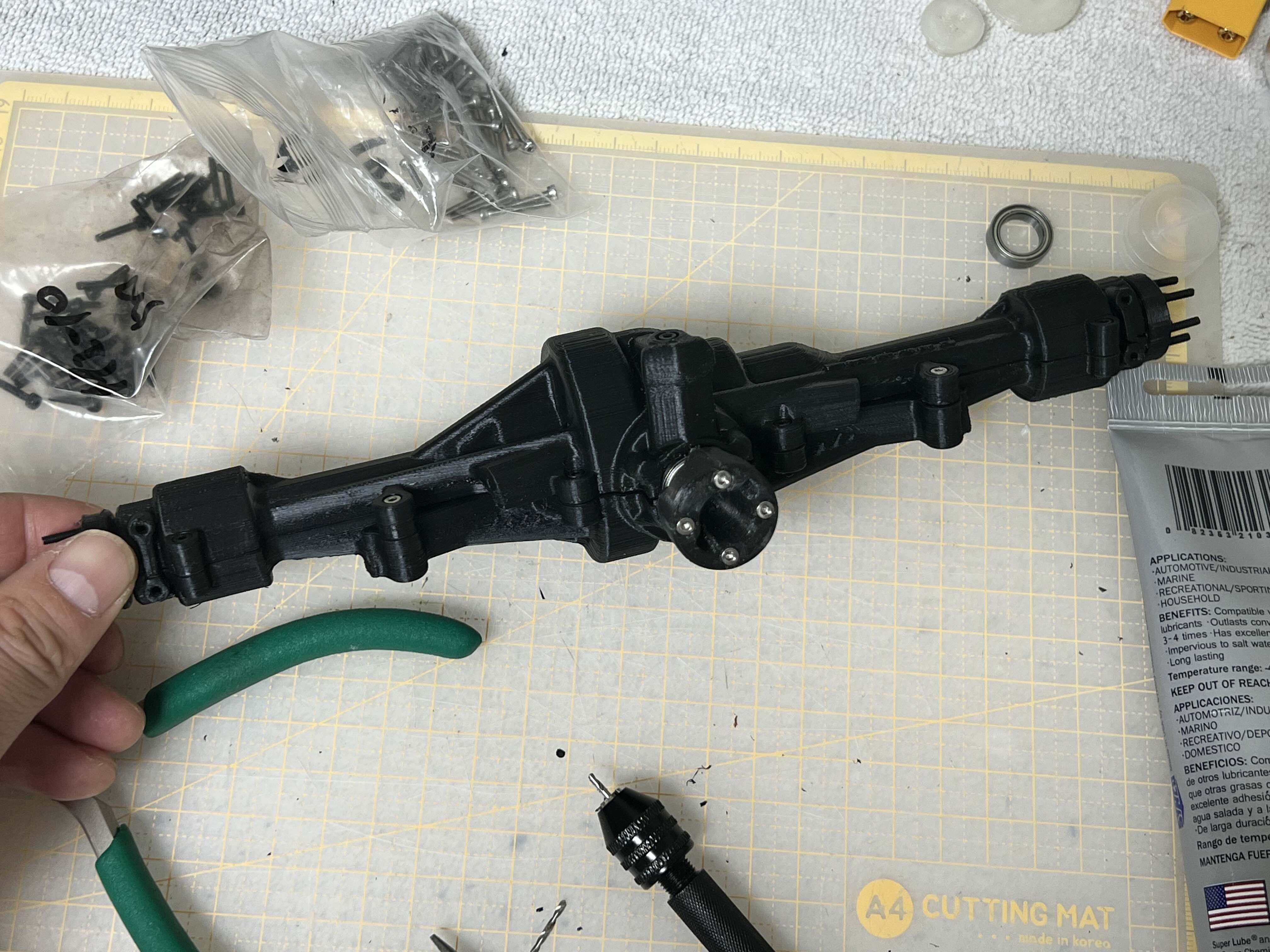
프론트 로드는 전산볼트를 이용해 자작으로 만들어 사용했습니다.
철물점에서 구입한 M4 굵기 전산볼트를 적당한 길이로 잘라 볼엔드를 결합하고 그 사이를 수축포로 감싸는 방법입니다.
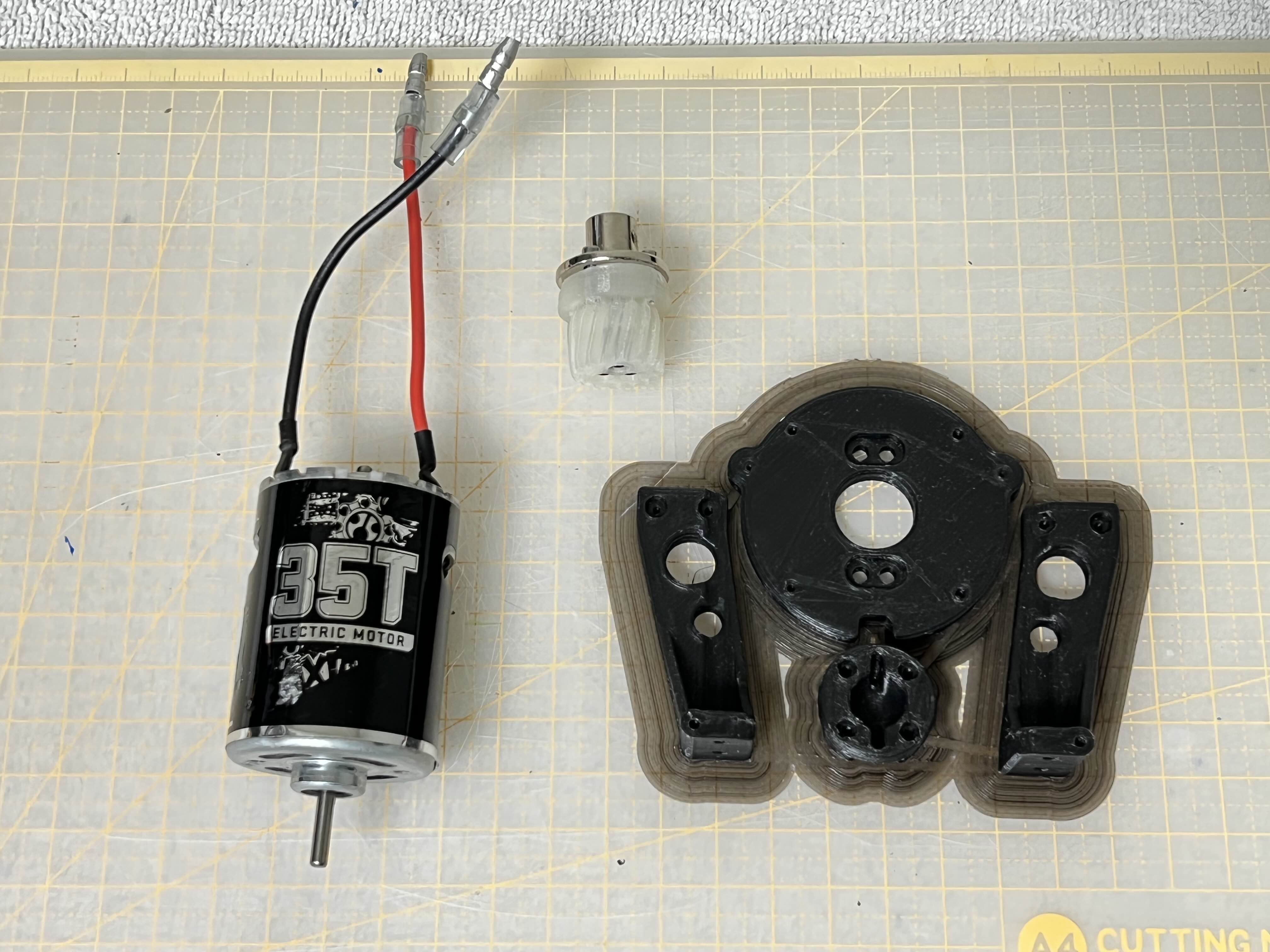
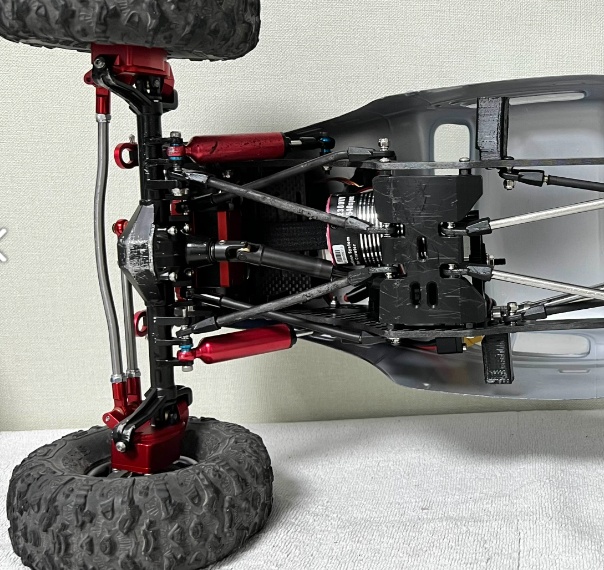
처음 가조립부터 예상했듯, 아웃러너 모터 사용을 권장하는 샷시에 억지로 일반 540 모터를 집어넣다 보니, 그로인해 정석대로 조립하는게 아닌 변칙을 사용해야 합니다.
그건 바로 링크로드를 샷시 안쪽에 위치시키는 것이 아닌 바깥쪽 외부에 장착하는 방법입니다.

로드의 중간에 흰색 테이핑이되어 있는건, 볼엔드를 장착할 때 니퍼로 꽉 잡을 경우 전산볼트의 나사선이 망가짐을 피하기 위한 이유입니다. 완성시점엔 수축튜브로 감싸서 나사선을 아예 안보이게 해줄 예정입니다.
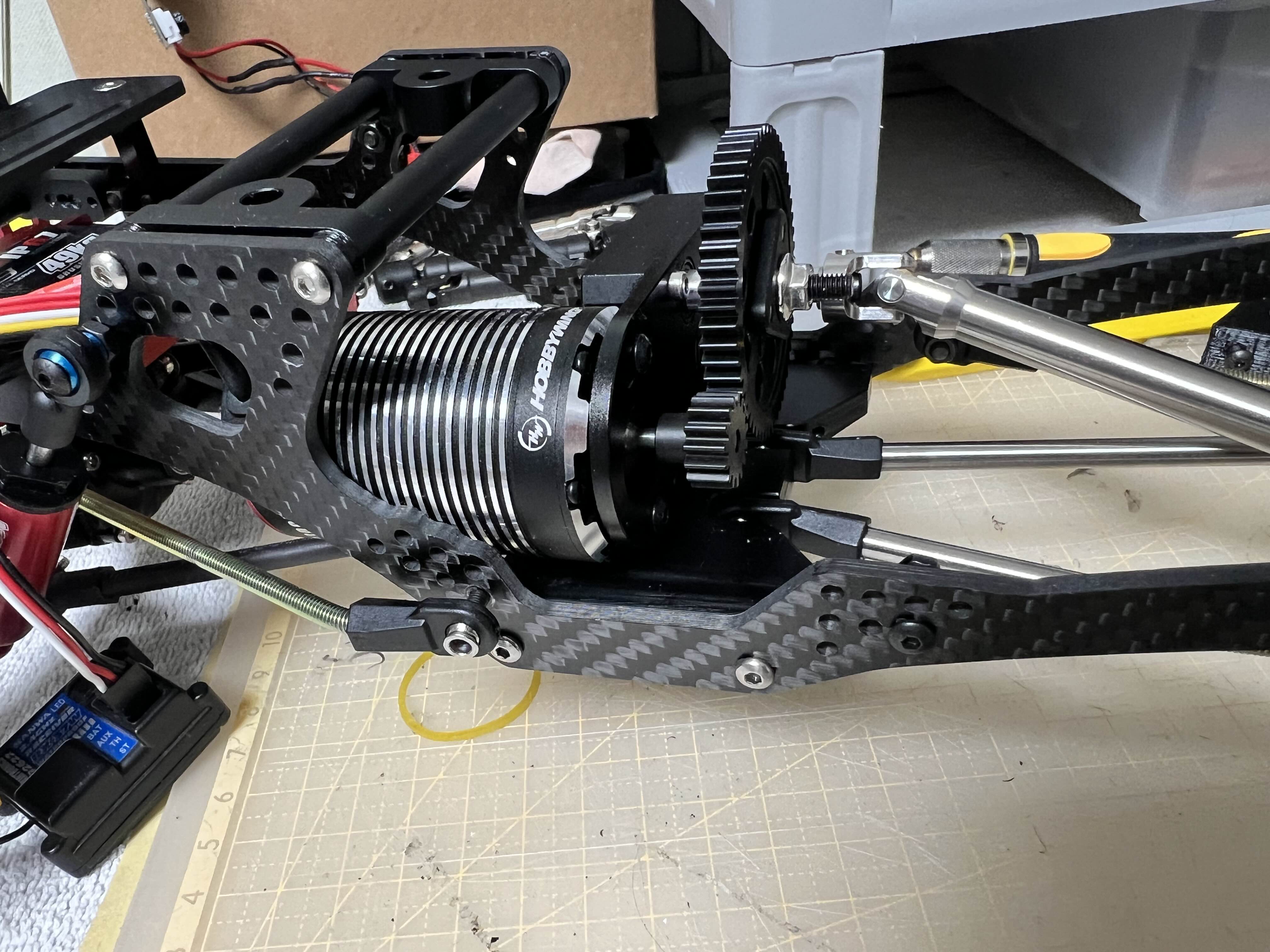
이렇게 모터로 인해 장착할 수 없는 부분에 한해 로드를 살짝 꺽어 휘게 만든다음 장착해주었습니다.
드라이브 샤프트(줄여서 드샤)도 샷시 구매시 동봉되어있던 짧은 길이의 드샤를 이용하려 했는데,
차체가 바닥에 눌릴때가 아닌 반대의 경우 위로 들려질경우 드샤가 소켓에서 빠지는 문제가 발생합니다.
드샤의 길이가 짧아 발생하는 문제로 그보다 살짝 긴 85mm 길이의 드샤를 추가 주문했습니다.
https://ko.aliexpress.com/item/1005005387035152.html
2004.0₩ 86% OFF|금속 내부 스플라인 드라이브 샤프트 유니버설 조인트 구동축, 1/10 RC 자동차 크롤
Smarter Shopping, Better Living! Aliexpress.com
ko.aliexpress.com
85-115mm 길이로 주문해서 일주일만에 배송받고 바로 장착해주니 이제는 차를 들어도 빠지지가 않네요!
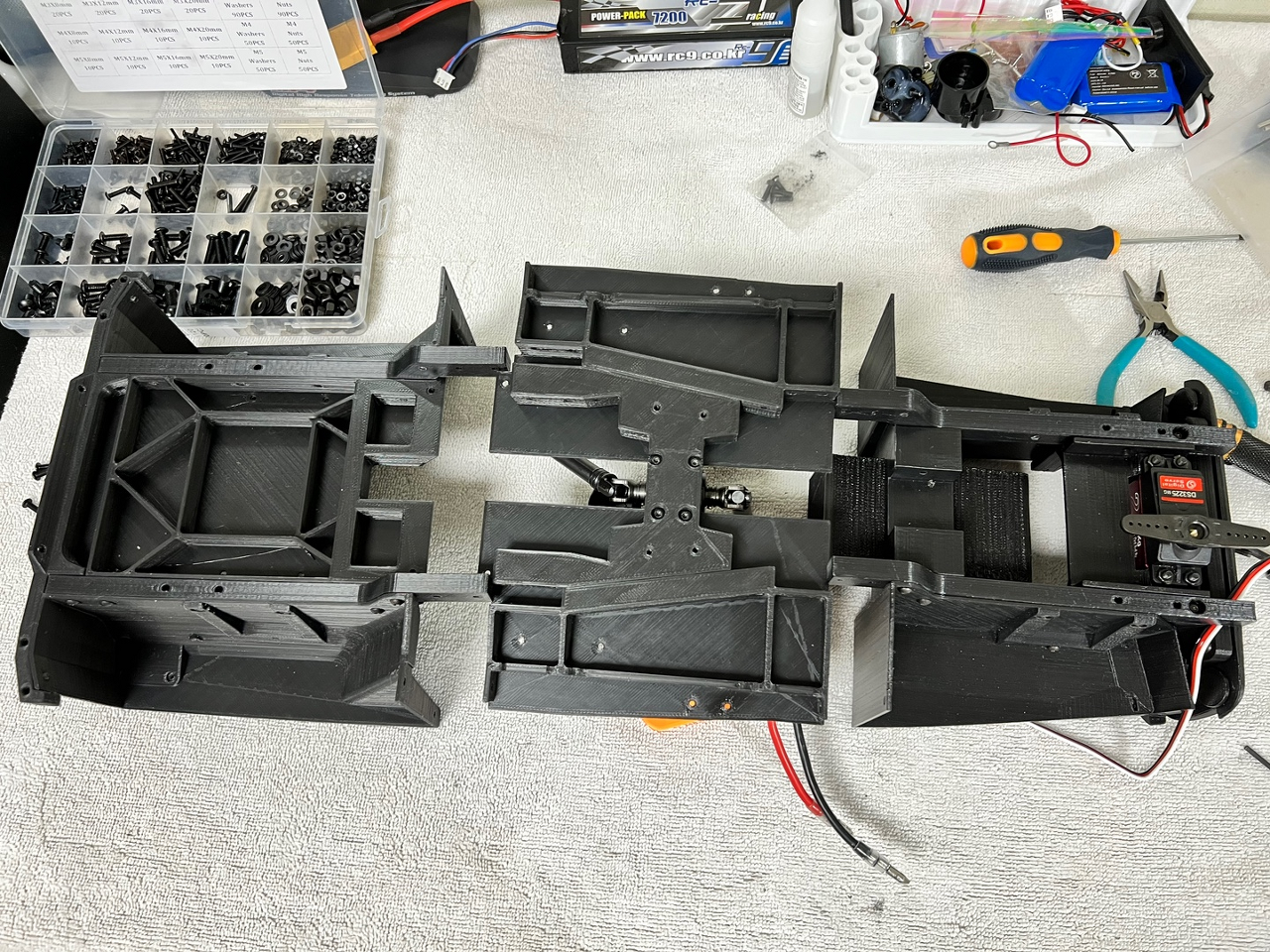
차량의 기본 골격은 완성되었으니
이제 남은 기자재를 모두 올려서 최종 완성시켜보도록 하겠습니다.
- 끗 -
'RC_Car > RC 커스텀 LCG 빌드' 카테고리의 다른 글
| [LCG] 커스텀 전용 LCG 빌드 6 - 바디 도색 (0) | 2024.04.22 |
|---|---|
| [LCG] 커스텀 전용 LCG 빌드 5 - 빌드완성 (0) | 2024.04.22 |
| [LCG] 커스텀 전용 LCG 빌드 3 - 문제점발생, 액슬변경 (0) | 2024.04.15 |
| [LCG] 커스텀 전용 LCG 빌드 2 - 스키드플레이트 및 모터장착 (0) | 2024.03.19 |
| [LCG] 커스텀 전용 LCG 빌드 1 - 샷시조립 (0) | 2024.03.18 |