컨제입니다.
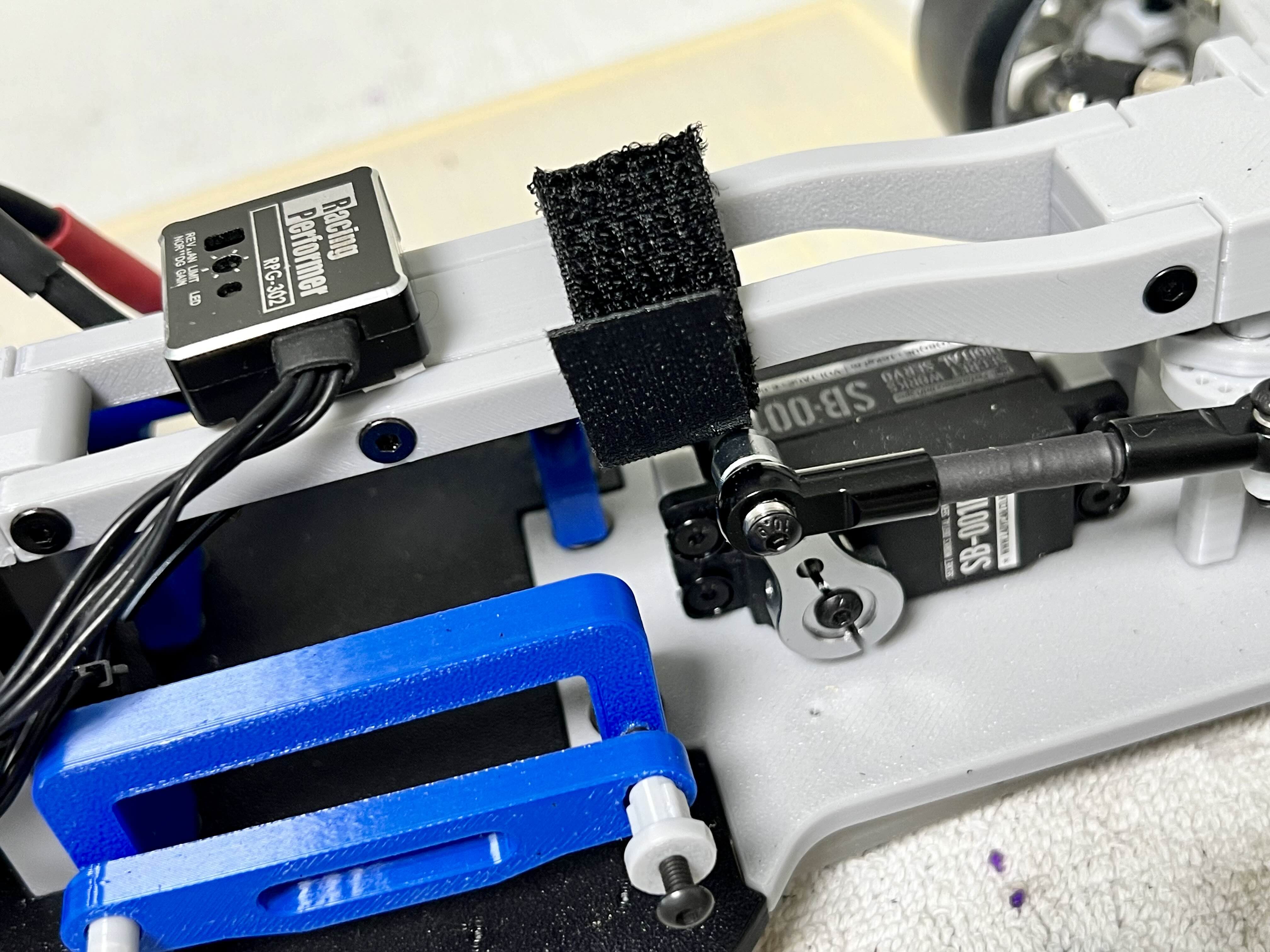
알리에서 구매할 수 있는 가성비 좋은 서보 D3519HB-S 와 같은 제조사 AFRC에서 출시한 GYS-1 V3 자이로를 추가로 구매하였습니다.
역시나 무시못할 가성비에 매료되어 한세트 더 들이게 되었는데요
셋팅 과정을 좀 정리해볼까 합니다.
이번엔 구매는 서보+자이로를 묶여있는 콤보를 구매하는 것 보다 서보 따로 자이로 따로 구매하는게 가격적인 측면에서 더 저렴하여 개별구매로 진행해 보았습니다.
구매링크 ↓ ↓
https://ko.aliexpress.com/item/1005004675978464.html
AFRC GYS-1 V3 레이싱 자이로 CNC 금속 케이스 스태빌라이저, RC 경쟁 드리프트 자동차 및 보트용 듀얼
Smarter Shopping, Better Living! Aliexpress.com
ko.aliexpress.com
AFRC GYS-1 V3 자이로 모습입니다.

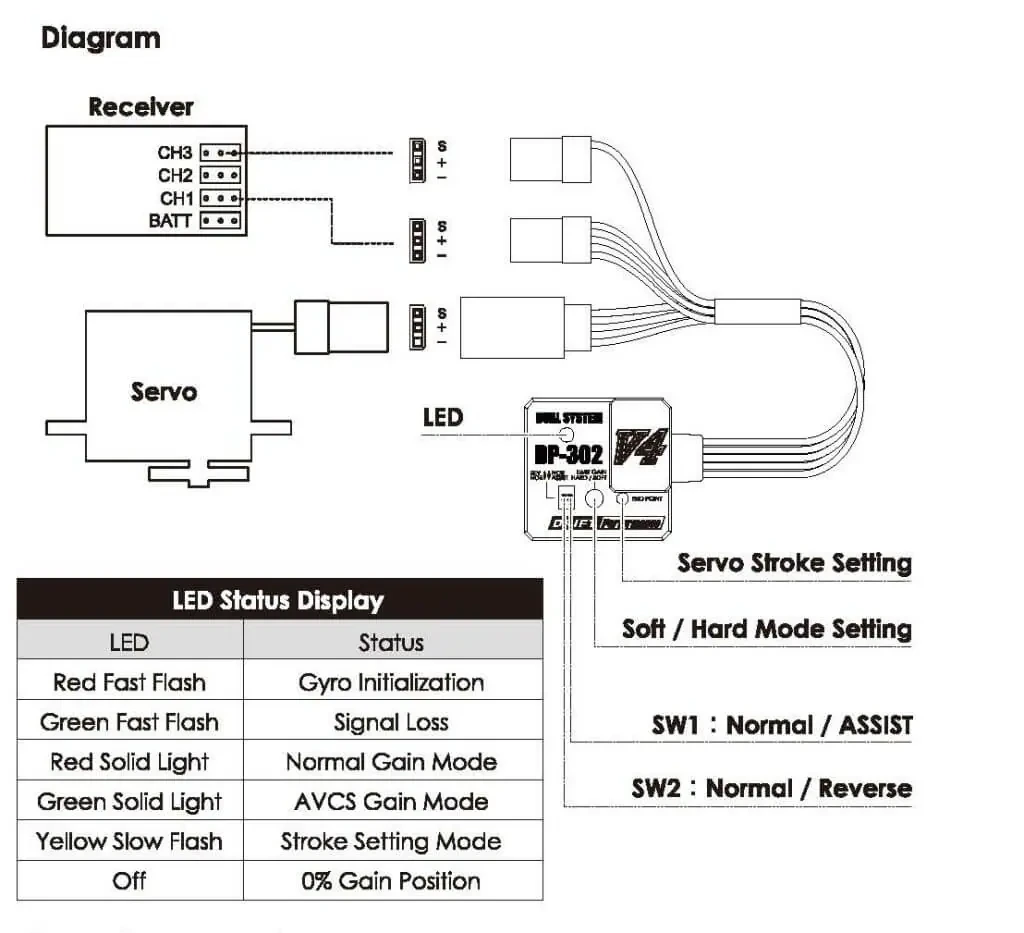
우선 매뉴얼을 찾아보겠습니다.
https://ko.hk-afrc.com/downloads/
HK-AFRC
2024 RCPD ROUND3 Jul .21.2024 2024 RCPD ROUND3 AFRC, as a leader in the field of RC model accessories, has long been committed to the research, development and production of high-quality model accessories, and its product line covers servos, gyros, receive
ko.hk-afrc.com
위 주소로 들어가면 매뉴얼을 다운받을 수 있습니다.
원본 매뉴얼 파일은 영문으로 되어있고,
파파고를 통한 번역본은 아래를 참고하세요.
번역이 직설적이긴 하지만, 전혀 이해못할 정도는 아니기에 도움이 되리라 생각됩니다.

중요점만 정리해보자면 이렇습니다.
엔드포인트 설정 방법(EPA 설정)
방법은 요코모 V4와 방법이 대동소이 합니다.
1. MOD 스위치를 누른 상태에서 변속기 전원을 ON → 노란색 LED가 깜빡거리며 EPA셋팅상태임을 알려준다.
2. 조종기의 스티어링을 오른쪽으로 돌리고 원하는 지점에서 MOD 스위치를 짧게 누른다.
→ 노란색 LED가 2번 깜빡거리고, 이어서 빨간색 LED가 켜며 저장을 알린다.
3. 다시 녹색 LED가 깜빡이면 조종기의 스티어링을 왼쪽으로 돌리고 MOD 스위치를 짧게 누른다.
→ 노란색 LED가 2번 깜빡거리고 노란색 LED가 켜진다.
4. 3번에서 노란색 LED가 켜지면 즉시 스티어링을 중립으로 위치한다(스티어링에 손을 떼면 자동 중립으로)
5. 설정한 값은 저장되고 2초 후 자이로가 초기화 되며 즉시 사용가능해진다.
(전원이 껏다 켜져도 셋팅값 기억)
※ 4번 과정에서 빠르게 중립으로 놓지 않으면 특정 스티어링 위치가 중립으로 인식해서 저장되고, 원치않는 작동으로 이루어질 수 있으니 재빠르게 중립으로 해야하며 만일 잘못된 설정이 되었다고 생각되면 전원을 끄고 엔드포인트 설정을 1번부터 다시 시도하시기 바랍니다.
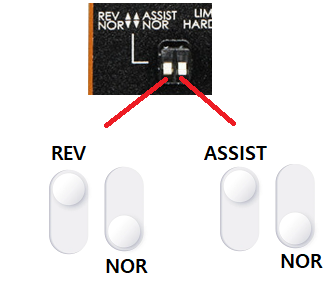
자이로 방향 설정
요코모 V4는 자이로 자체에 물리적 스위치가 있어 변환하지만, afrc V3 자이로는 물리적 스위치가 없습니다.
전환 방법은 이렇습니다.
1. 정상작동 상태에서 MOD 버튼을 4초간 길게 누른다.
2. 이때 노란색 LED가 천천히 3번 깜빡인 다음 조종기의 자이로 감도를 조절합니다.
3. 방향이 변경되었는지 확인
차량의 리어를 잡고 프론트는 정지해 있는 상태에서 오른쪽(→) 으로 슥 이동시 프론트 스티어링이 자이로에 의해 같은 방향인 오른쪽(→)으로 따라 움직여야 합니다.
그러면 방향이 맞는 상태.
만약 반대로 스티어링이 반응한다면 방향설정을 다시 바꿔줍니다.
AVCS 모드란?
매뉴얼 설명상 AVCS 모드라는게 나오는데, 이는 자이로의 개입이 강한 제어모드를 뜻합니다.
즉, 초보자나 입문자처럼 조종게 익숙치 않은 유저에게 자이로가 강하게 개입해 조종감을 쉽게 해주는 역활입니다.
이는 어느정도 익숙한 유저에게는 오히려 강한개입으로 인해 원하는 방향으로 드리프팅으로 이루어지지 않을 수 있으므로 Normal 모드로 주행하는게 좋습니다.
정리하면,
AVCS Mode(빨강 LED 모드)- 자이로의 강한 개입 : 완전초보 유저에게 맞는 설정
Normal Mode(녹색 LED 모드) - 자이로의 적당한 개입 : 어느정도 익숙한 유저에게 맞는 설정
궁금증하나.
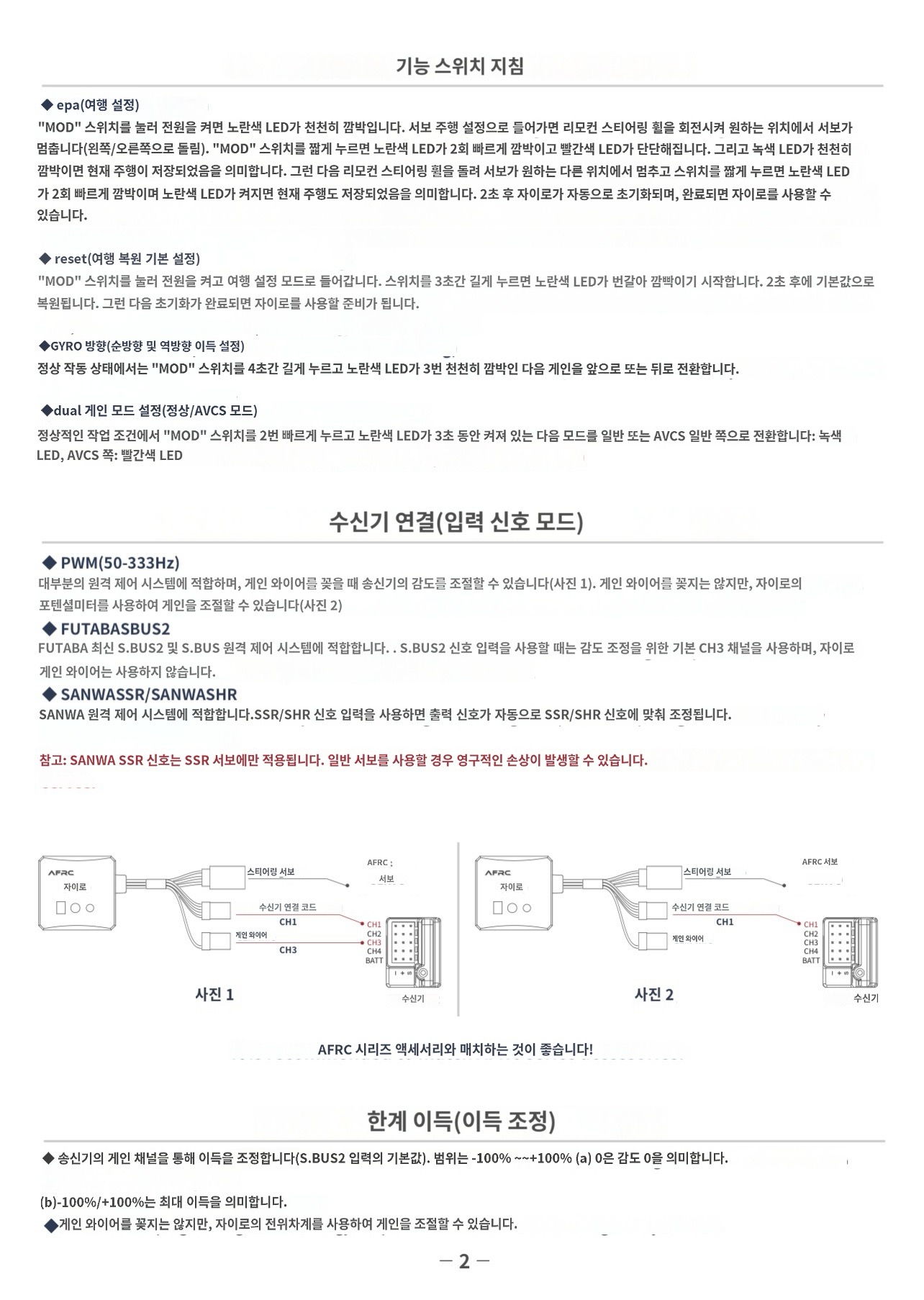
조종기 CH3을 통해 자이로 게인을 조절합니다. 다이얼등을 돌려 감도를 올리고 낮출수 있는데 이때 -100 에서 0까지 그리고 다시 0에서 100까지 총 200의 게인 값을 조절할 수 있습니다. 그 차이점은 무엇일까요?
제조사의 공식적인 답변은
-100% ~ 0% 와 0% ~ 100%는 동일 커브값을 가진다. 즉 -100%(negative)나 100%(positive)가 동일 하다.
색상이 빨간색/녹색으로 변경되는 것 일뿐 적용되는 값은 같다.
모드 변경은 자이로에 붙어있는 버튼을 통해서만 변경이 가능하다.
하지만,
여럿 사용자들의 공통적인 의견을 모아보자면
positive(+) 구간의 감도에서 헌팅현상(서보가 터는 현상)이 발생할경우 이 수치를 negative(-)로 변경해 설정하면 어느정도 헌팅현상이 완화 될수 있다는 의견이 있습니다.
직접 경험한것이 아닌 들은 이야기 이므로, 참고만 해주시면 좋을것 같습니다.
이상 알리발 자이로 GYS-1 V3 자이로 셋팅방법에 대해 적어봤습니다.
국민자이로로 불리는 요코모 V4만큼은 아닐지라도 가성비에 준수한 성능을 보이는 알리발 자이로.
자신만의 셋팅값으로 원하는 드리프팅 하시기 바랍니다.
감사합니다.
- 끗 -
'RC_Car > RC 드리프트(Drift)' 카테고리의 다른 글
| [휠베 225mm 제작기 2nd] - 모터 갈아내기 / 최종완성 (0) | 2025.02.04 |
|---|---|
| [휠베 225mm 제작기 1nd] 자작 샷시 & G4 컨버전 (0) | 2024.12.24 |
| [DIY] 카본 자작 샷시 제작기 (휠베 225mm) (1) | 2024.12.24 |
| [브론즈하브] 센터 드라이브 샤프트 교체 진행 (0) | 2024.11.13 |
| 리어 윙 플레이트(Rear Wing Plate) 교체진행 (0) | 2024.11.10 |