컨제입니다.
차량이 추가되면서 수신기가 또 필요해졌습니다.
임시로 trx4m (1:18미니 차량)의 수신기를 떼서 빌드테스트만 진행했는데, 전용으로 사용할 수신기가 필요합니다.
제가 사용중인 송신기는 산와 MT-4 라는 모델입니다.
현재 차량 4대가 모두 이 MT-4에 연결되어있고 주행시 차량에 맞게 선택해서 쓰고 있는데 락버기용 수신기가 하나 더 필요해졌습니다.
몬트 장터에 수신기 구매글을 몇일동안 올려보았으나 입질조차 없네요; 그렇다고 새제품을 사기엔 너무 비싸서 엄두가 나질 않습니다.
이래저래 고민하다가 호환수신기라는게 눈에 들어옵니다.
호환 즉 카피제품, 똑같이 따라만든 복제품 혹은 짭퉁이라는건데.. 아무래도 정품을 사용하면 좋겠지만 상황상 그건 어렵다고 판단되어 경험도 해볼겸 해서 사용해보기로 합니다.
구매는 역시 알리를 통해 구매했습니다.
https://a.aliexpress.com/_oEVgo9m
US $80.30 | Sanwa 호환 수신기, Sanwa FH3 FH4, 4 채널, 안테나 없는 표면 수신기, RC 자동차 모델 2.4G
US $80.30 | Sanwa 호환 수신기, Sanwa FH3 FH4, 4 채널, 안테나 없는 표면 수신기, RC 자동차 모델 2.4G
star.aliexpress.com
오잉 원래 가격이 80$ 였나보군요;; ㄷㄷ
뭐 어쨋든 지금은 그냥 주문해도 25$면 살수 있지만 월초 할인적용에 쿠폰먹여서 19.76$에 결재를 완료했습니다.
우리돈 27,390원! 배송역시 무료배송이구요~
.
.
.
주문후 일주일만에 배송이되었습니다.
뽁뽁이로 잘 포장되어 도착!
꼼꼼히 살펴보겠습니다.

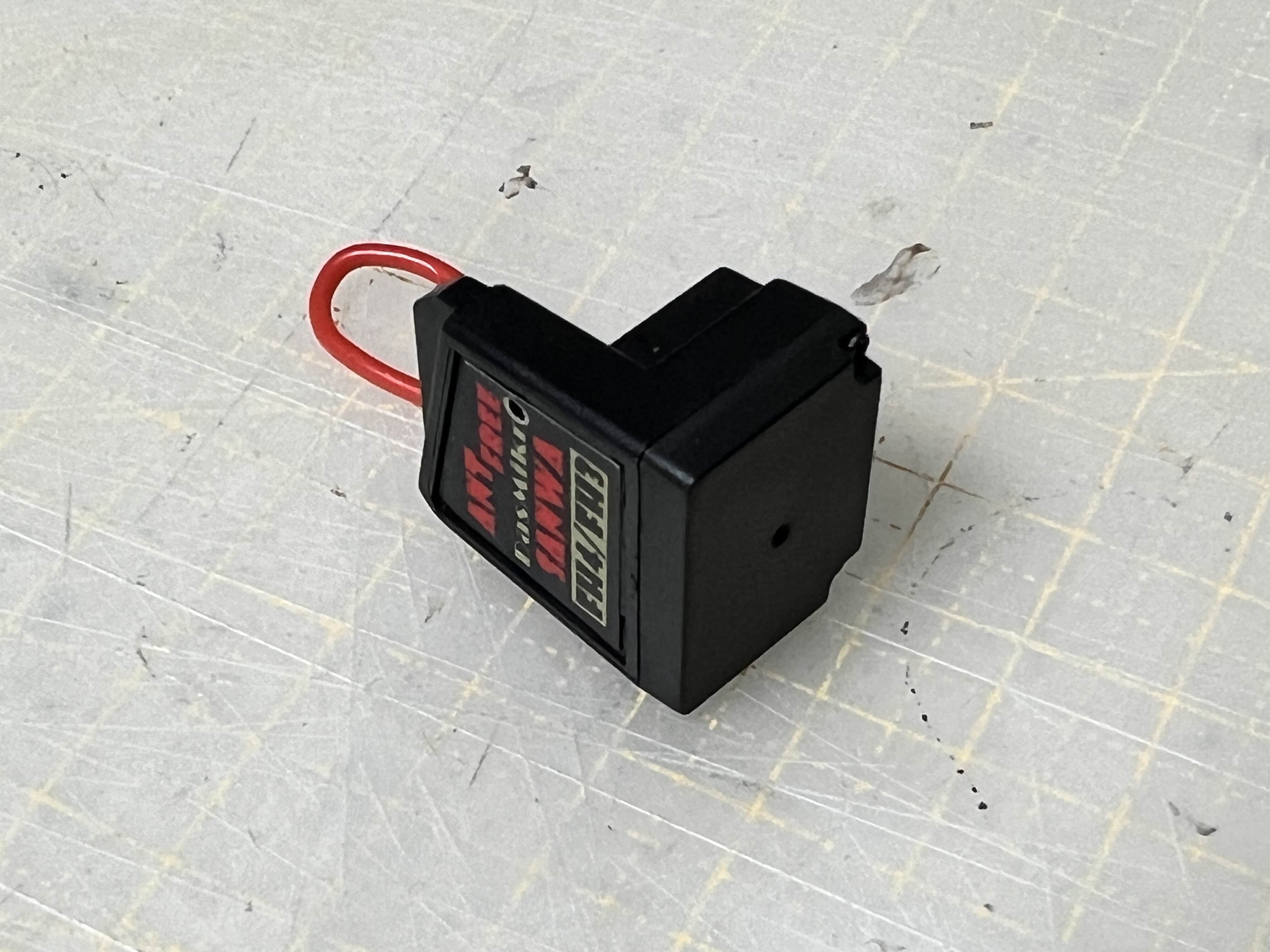
DasMikro 가 제조사 인가봅니다.

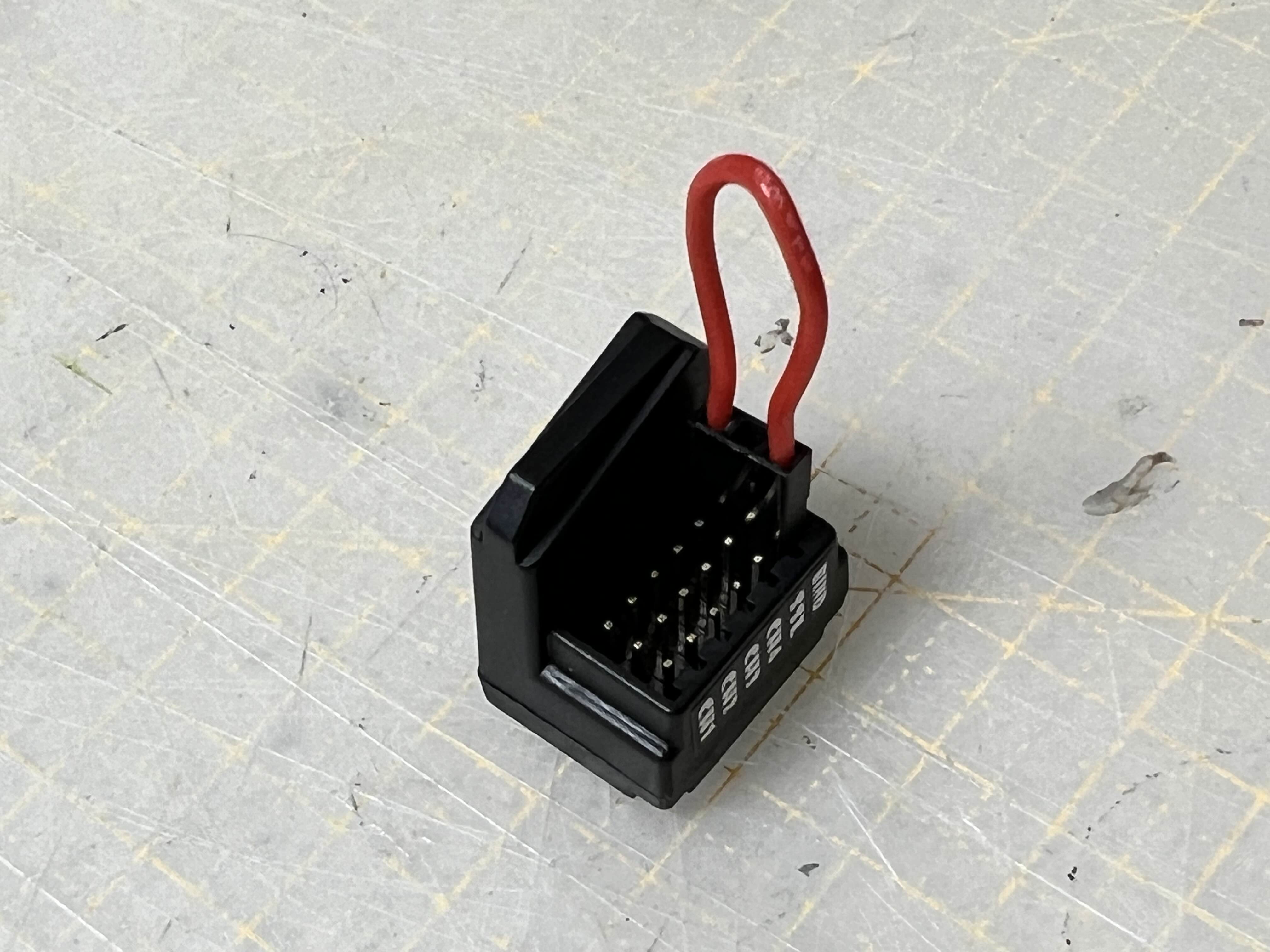
택을 제거하고 수신기를 꺼내봅니다.

오 크기가 정말 작네요
주로 사용하는 w37 수신기보다 좀더 작은것 같습니다.

측면에서 보면 이런모습

뒤쪽 측면입니다.

그 반대쪽 이구요
바닥은 아무것도 없네요
수신기에 기본으로 꼽혀있는 이 케이블은 송신기와 바인딩 할때 필요한 커넥터 입니다.
이미 바인드 부분에 꼽혀있으므로 구매 후 송신기와 바인딩 한 다음 사용할때는 제거하고 사용하면 됩니다.
보통 정품 수신기에는 Bind 버튼이 따로 있어 그걸 누르고 바인드를 하지만, 이 수신기는 그런 버튼은 없고 이 커넥터로 신호를 주는것 같습니다.

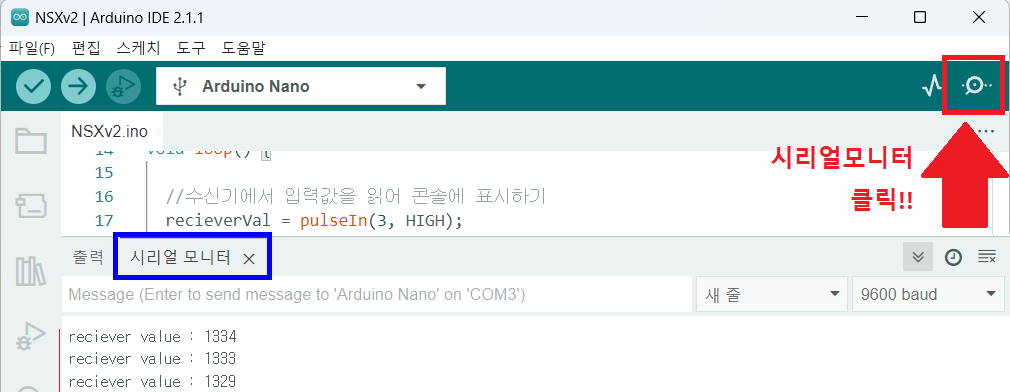
우선 수신기에 전기가 인입되어야 하니
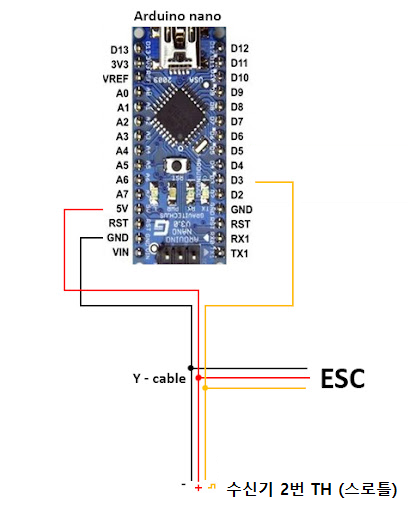
사용할 차량(이 수신기는 최근 빌드한 락버기에 사용)을 가져와서 변속기와 서보 커넥터를 연결해줍니다.
순서는 동일하게 1채널이 ST(스티어링/조향), 2채널이 TH(스로틀/전후진)
송신기에는 1,2,3,4번 모드는 모두 사용중이라 5번으로 잡아주고 프로토콜 FH4로 선택한 다음 BIND를 활성화 합니다.
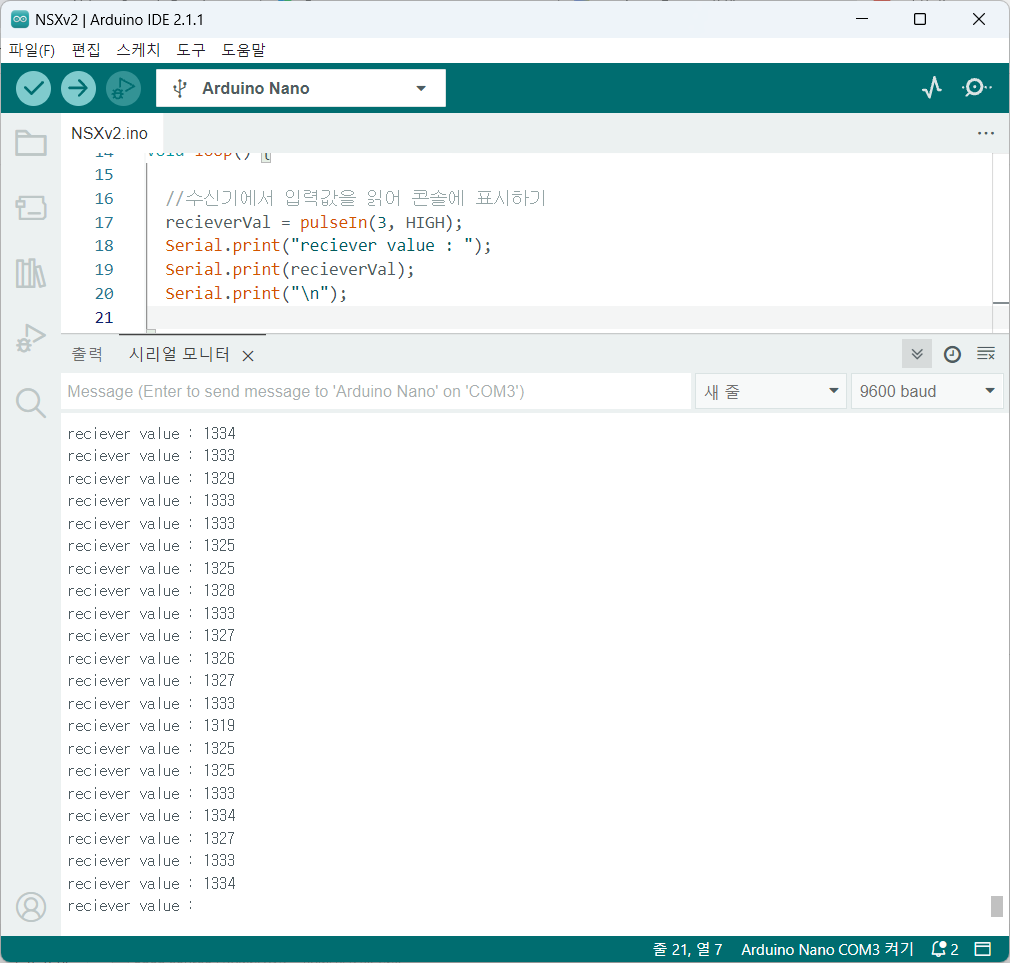
그리고 변속기의 전원을 올리니 아무 반응이 없는것 같아 스티어링을 움직여보니 바로 반응합니다.
바인딩 완료!
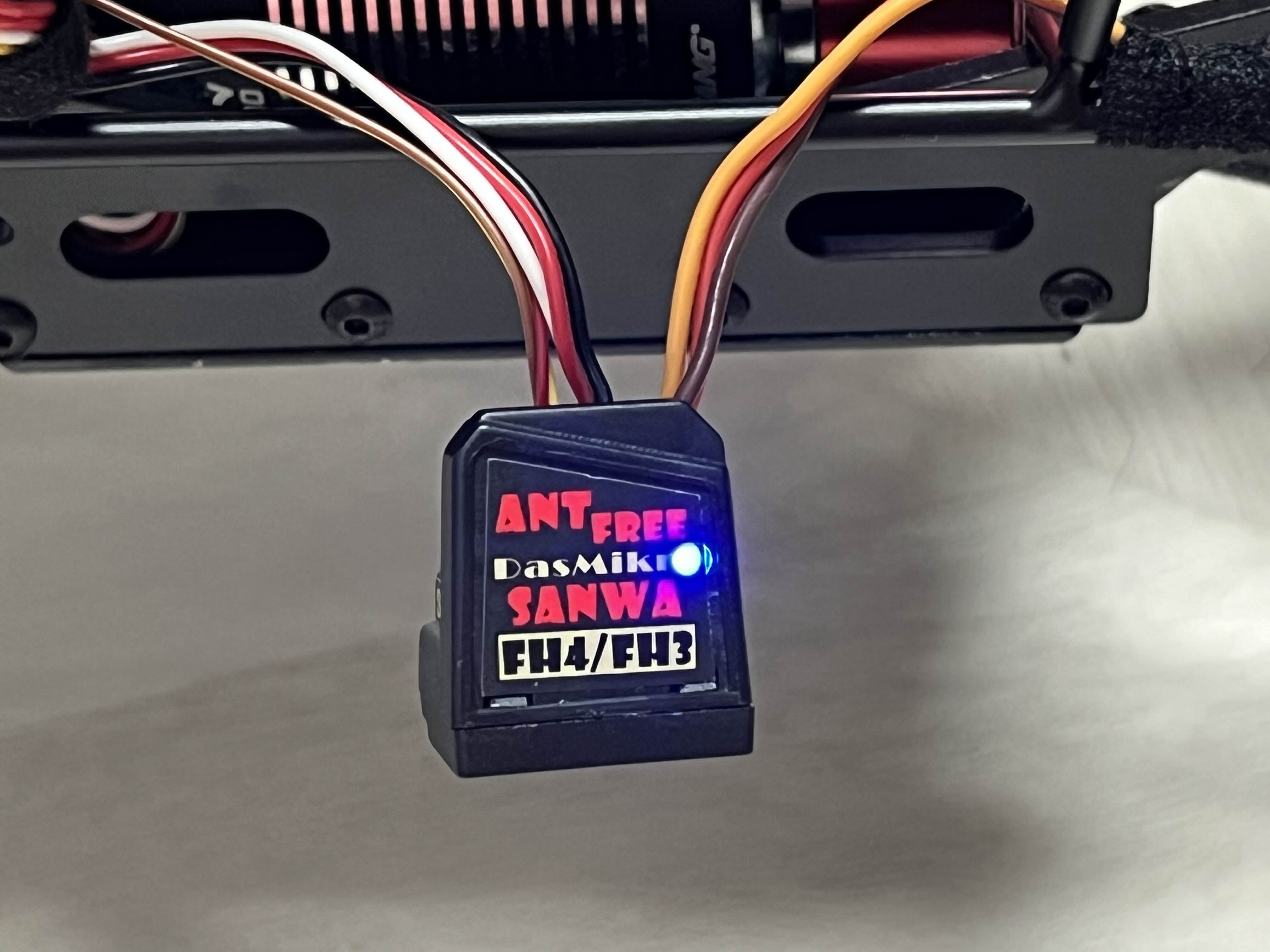
수신기를 보니 led에 불빛이 잘 들어오고 있네요~
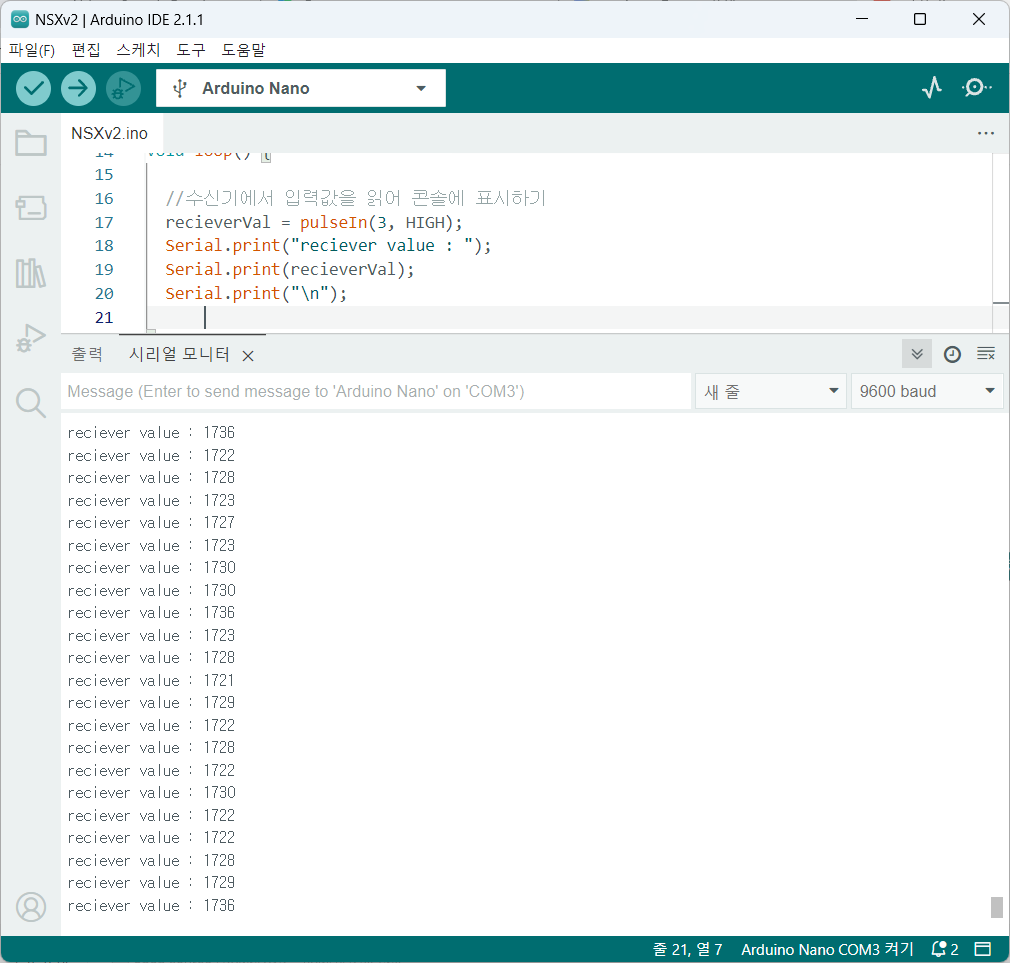
수신기 3채널에 led 경광등도 연결해보니 문제없이 잘 들어옵니다.
구웃~
반응속도도 크게 느리다거나 문제가 있다고는 전혀 느끼지지 않습니다.
물론 좀더 장시간 운용을 해봐야겠지만, 바인딩 후 잠깐의 주행 테스트에서는 정품수신기와 동일하게 전혀 다를바없이 정상적으로 작동해주네요.
구매전 확인했던 알리의 상품평에도 400건이 넘는 구매이력과 4.8대의 상품평이 이 제품의 성능을 대변 해주는것 같습니다.
일단 가격대비 너무 만족스럽습니다.
오히려 구매하려 했던 산와정품 37w의 경우 중고가도 3만원대에 거래되고, 택배로 진행시 추가 택배비까지 지불해야 할텐데, 이 제품을 구매하니 배송비없이 2만7천에 해결하게 된거니까요.
수신거리는 얼마나 될지 확인을 해봐야 알 수 있겠지만, 산행을 주로하는 트라이얼의 특성상 송신기와 그리 멀리 떨어질 일이 많지 않을터이니 크게 상관없을것이고
내구성만 좋으면 하나를 더 구매해도 좋을것 같다는 생각입니다.
최근 정부에서 직구 금지를 때렸다가 철회하는 행보를 보이고 있는데,
만약 직구를 금지하게 된다면 그 대상이었던 전자제품 항목에 대부분의 RC제품이 포함되므로 이런 가성비 좋은 제품을 구매할 수 없게될 지도 모릅니다. 아니면 10배이상 가격이 오른 동일한 제품을 국내에서 구매해야 할지도...
부디 그런 일은 일어나지 않았으면 하는 간절한 바램을 해봅니다.
이상 알리발 산와 호환수신기 개봉 및 사용기를 마칩니다.
감사합니다.
- 끗 -
'RC_Car > RC 스토리' 카테고리의 다른 글
| FLYSKY Noble NB4 (노블 NB4) 송신기 영입 및 수신기 구입기 (0) | 2024.06.16 |
|---|---|
| 알리 - 오보닉(Ovonic) Li-Po 배터리 구입 및 개봉기 (0) | 2024.05.23 |
| 간단한 서보테스터기 자작 DIY (0) | 2024.05.16 |
| 양카로 만들어줄 LED 제품, 배터리형 -> 직결연결 변환 적용기 (0) | 2024.05.10 |
| MT-4 송신기 후크 장착 후기 (0) | 2024.03.19 |