컨제입니다.
1/24 Drift ART 4 (DA4)에 장착해줄 휠과 타이어를 찾고 있는 중인데,
임시방편으로 휠+타이어를 3D 프린터를 이용해 뽑아보려고 합니다.
제가 보유한 3D프린터는 뱀부랩 A1 mini
감사하게도 싱기버스에 딱 원하는 스타일의 모델링을 찾을 수 있었습니다.
https://www.thingiverse.com/thing:6464084
Rim and Tire drift for WLtoys k989 k969 284131 1/28 by FernandoF
This isn't exactly a remix but a complete set of Rim and Tire for the 1/28 Wltoys rc cars. I designed the tire based on "AA8_VolkTE37+1_Easy_Print" fits perfect without using any glue (not needed but optional). Tires must be printed using TPU 60D or simila
www.thingiverse.com
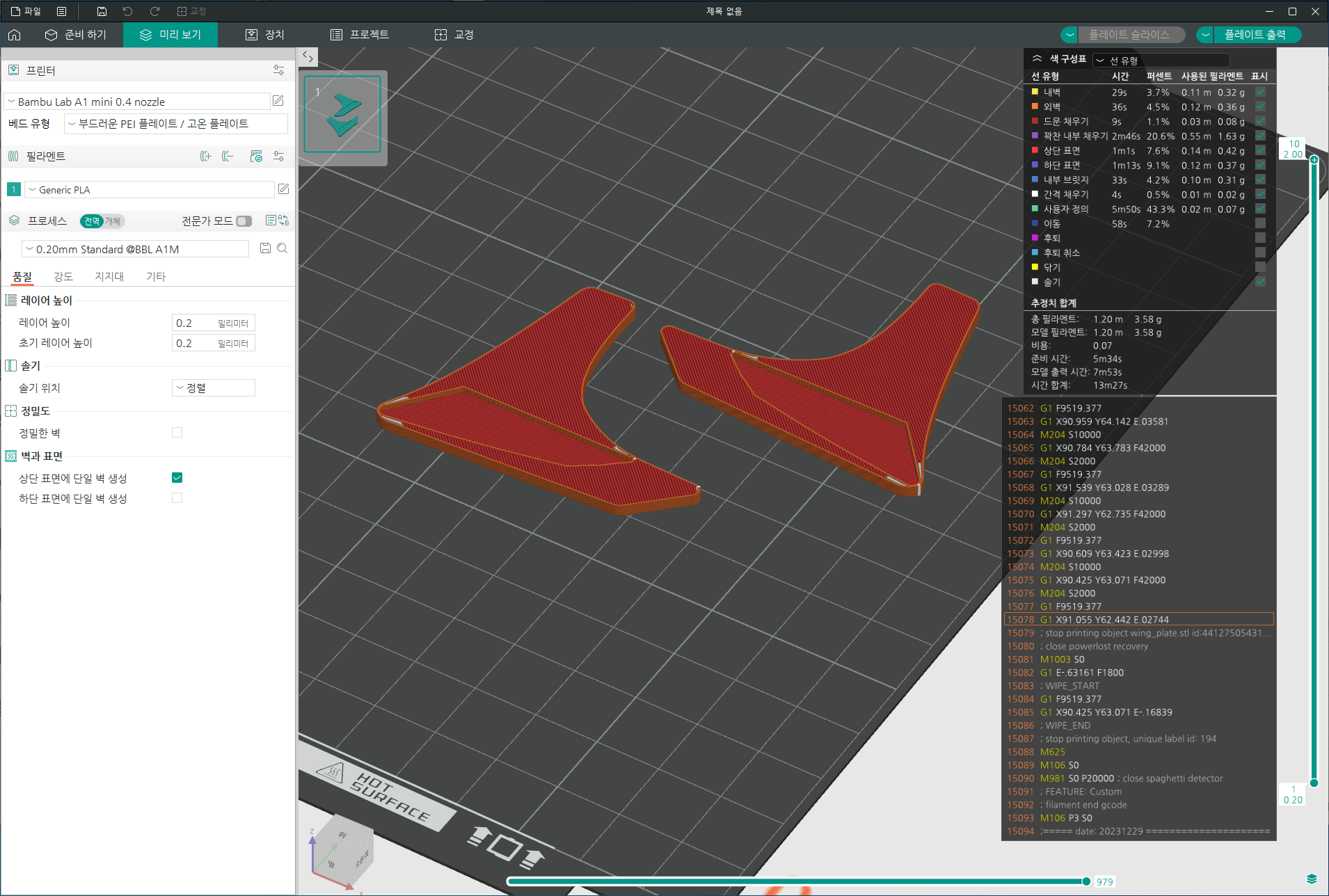
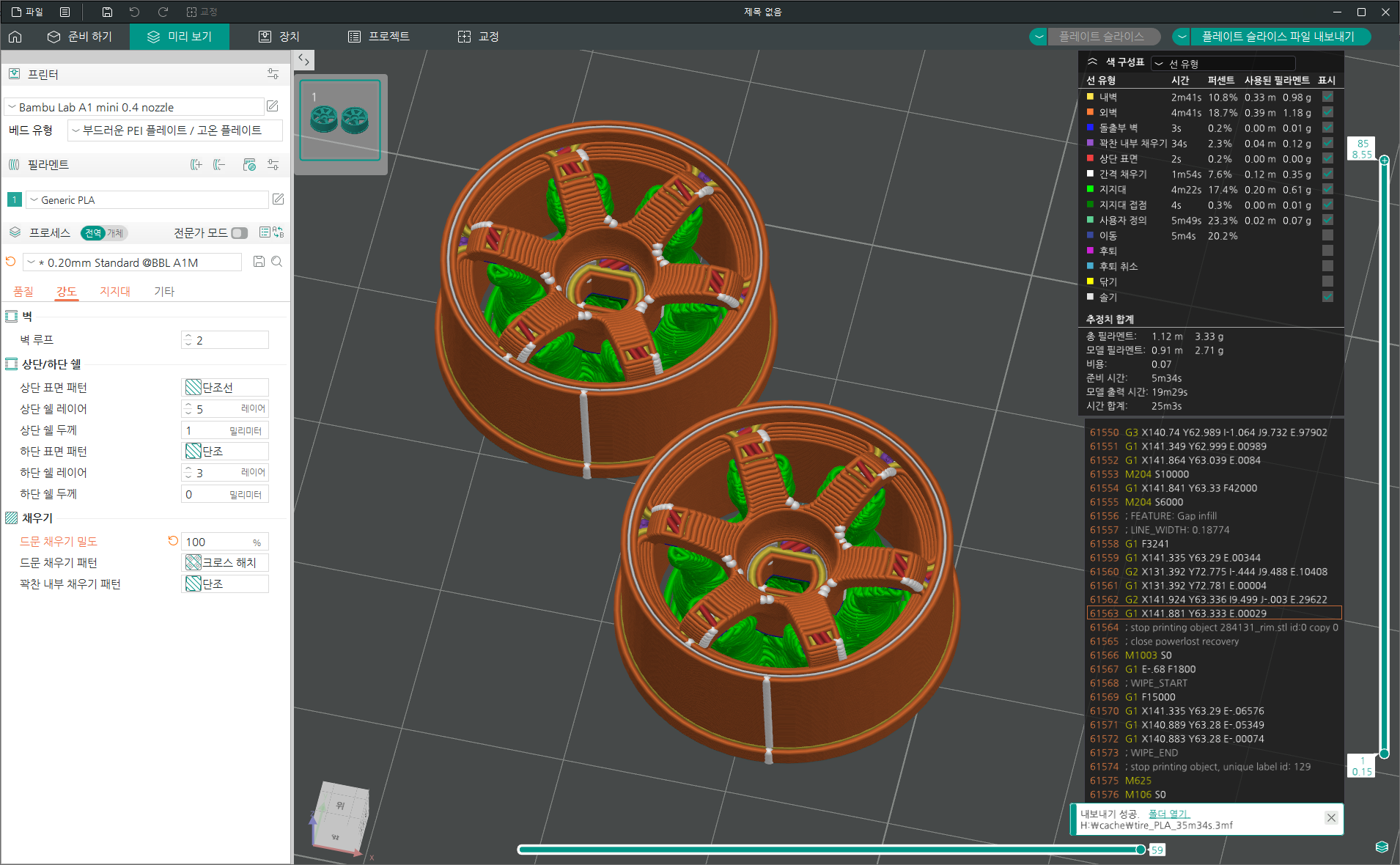
바로 다운받아서 오르카 슬라이서로 가져갑니다.
우선 2짝만 출력해보는걸로,
출력품질은 0.1mm 로 퀄리티를 최대한 끌어올려보고
infill 100%, 서포트는 tree 자동으로 맞춰서 슬라이싱 해보니
예상 출력시간 25분 나오네요.
ABS나 PETG로 뽑으면 좋겠지만, 환경적인 상황상 PLA로 진행합니다.
그래도 일반 PLA보다는 강성이 더 뛰어난 PLA+ 로 재료를 선택하였습니다.
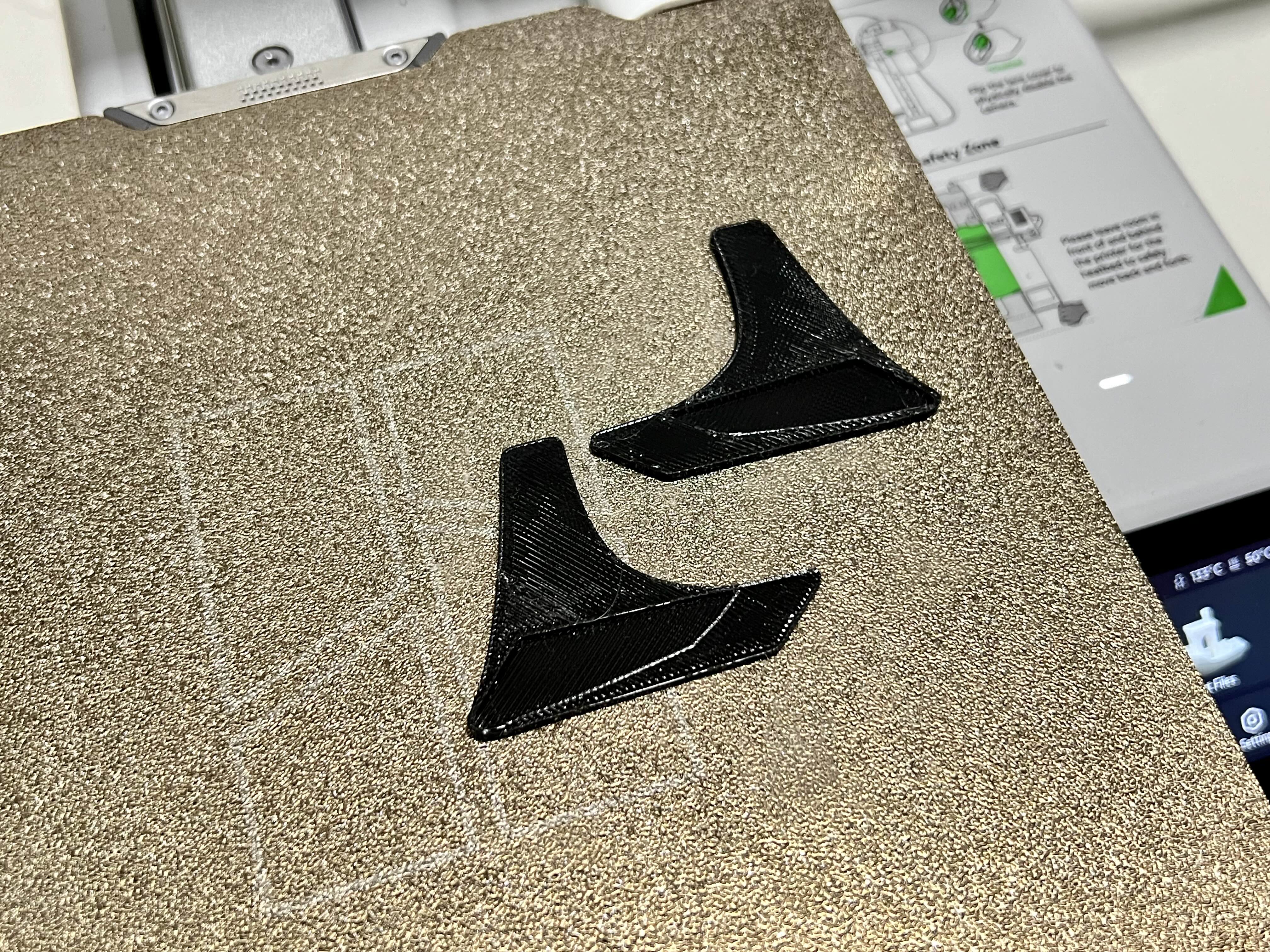
깔끔히 잘 출력되어 나왔습니다.
가까이 보면 적층이 보이긴 하지만 적층두께 0.1mm라 살짝만 멀어져도 티가 잘 나지 않아 보입니다ㅋㅋ

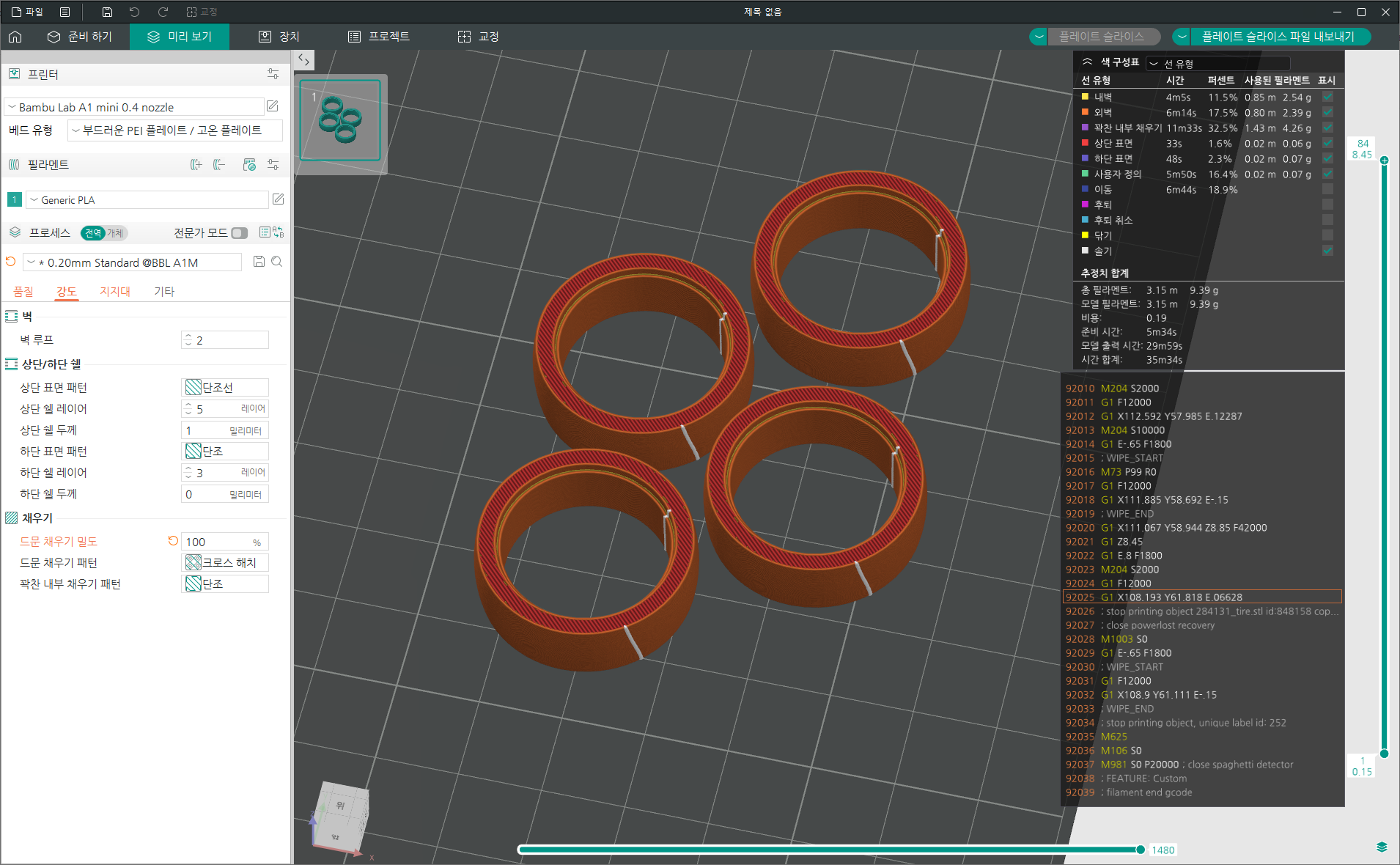
이번엔 타이어차례
슬라이서에 타이어를 올리고 같은 조건으로 셋팅 후 출력합니다.
타이어는 출력실패확률이 적다 판단되어 4개를 한꺼번에 진행해보았습니다.
깔끔히 잘 출력되었습니다.

휠도 추가로 2개 더 출력해서 총 휠4개 타이어4개가 완성되었습니다.
이제 휠을 타이어에 끼워줄 차례.
안쪽 홈이 보이는 쪽이 바깥쪽이 될수 있도록 휠을 끼워줍니다.
강하게 힘을 주니 쏘옥 들어가는 휠

4개 모두 휠을 끼워주고
차차에 장착해 봐야겠죠.
샷시구매시 동봉되어 있던 나이론 락너트를 준비합니다.

휠을 장착하려고 보니 이런...
휠 센터 구멍이 너무 작아 공구가 육각 소켓이 들어가지 않네요;
니퍼로 돌려 껴보려고 해봤는데, 역시나 틈새가 넓지 않아서 락너트는 사용불가!
그래서 일반 M2 너트를 가지고 끼워봤는데, 공간이 없으니 돌리기마저 쉽지 않습니다.

락너트가 아닌이상 주행 중 풀릴 수도 있을것 같기도 하고,
또 다른 휠로 교체가 필요할때 쉽게 진행할 수 없을것 같아 작업을 중지하고, 이 출력물 휠타이어는 우선 스페어로 보관해 두기로 결정했습니다.
결론적으로 실패....ㅋㅋ
어쨋든 임시방편으로 뽑아본 거에 의의를 두어야겠습니다.
서둘러 기성품을 주문을 해야겠네요
ㅎㅎㅎ
- 끗 -
'RC_Car > [Micro RC] 1:24 마이크로 RC' 카테고리의 다른 글
| [마이크로 RC] 자이로 (Gyro) 연결 및 장착 (1) | 2024.12.14 |
|---|---|
| [마이크로 RC] 모터+변속기 장착 적용 (0) | 2024.12.13 |
| [마이크로RC] 서보 장착 (0) | 2024.12.13 |
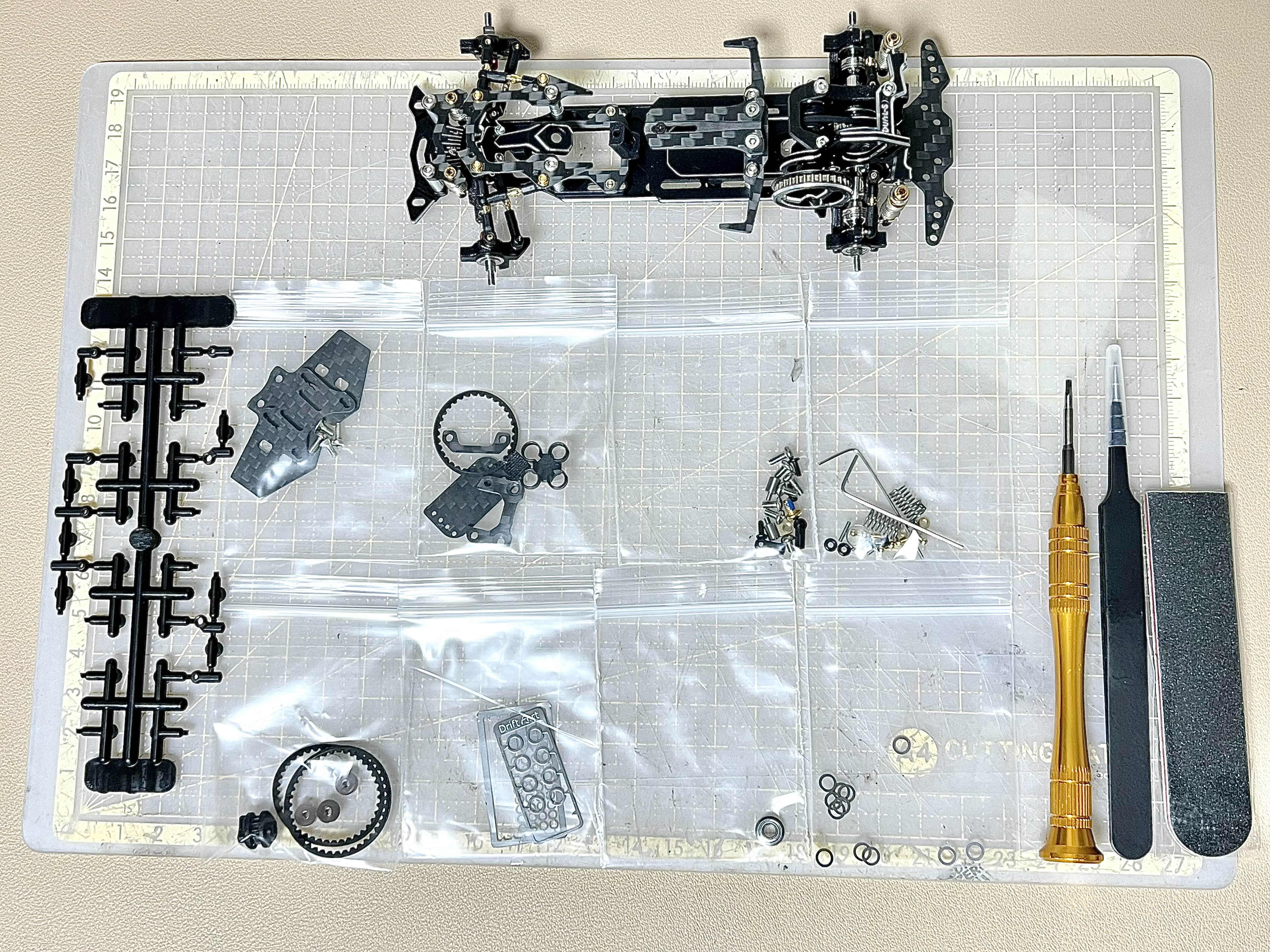
| [마이크로RC] Drift ART 4 킷 개봉기 (0) | 2024.11.21 |