컨제입니다.
지난번 DIY 자작으로 휠베이스 225mm 샷시를 제작해 보았습니다.
참고 : https://kernzeroid.tistory.com/229
[DIY] 카본 자작 샷시 제작기 (휠베 225mm)
컨제입니다. 이번에 새로운 개인 프로젝트를 진행해보려고 합니다.이름하야 숏휠베이스 드리프트 RC카! 기존 휠베이스 260mm, 273mm 이 아닌 이보다 좀 더 작은 225mm 휠베이스로 말이죠. 그럴려면
kernzeroid.tistory.com
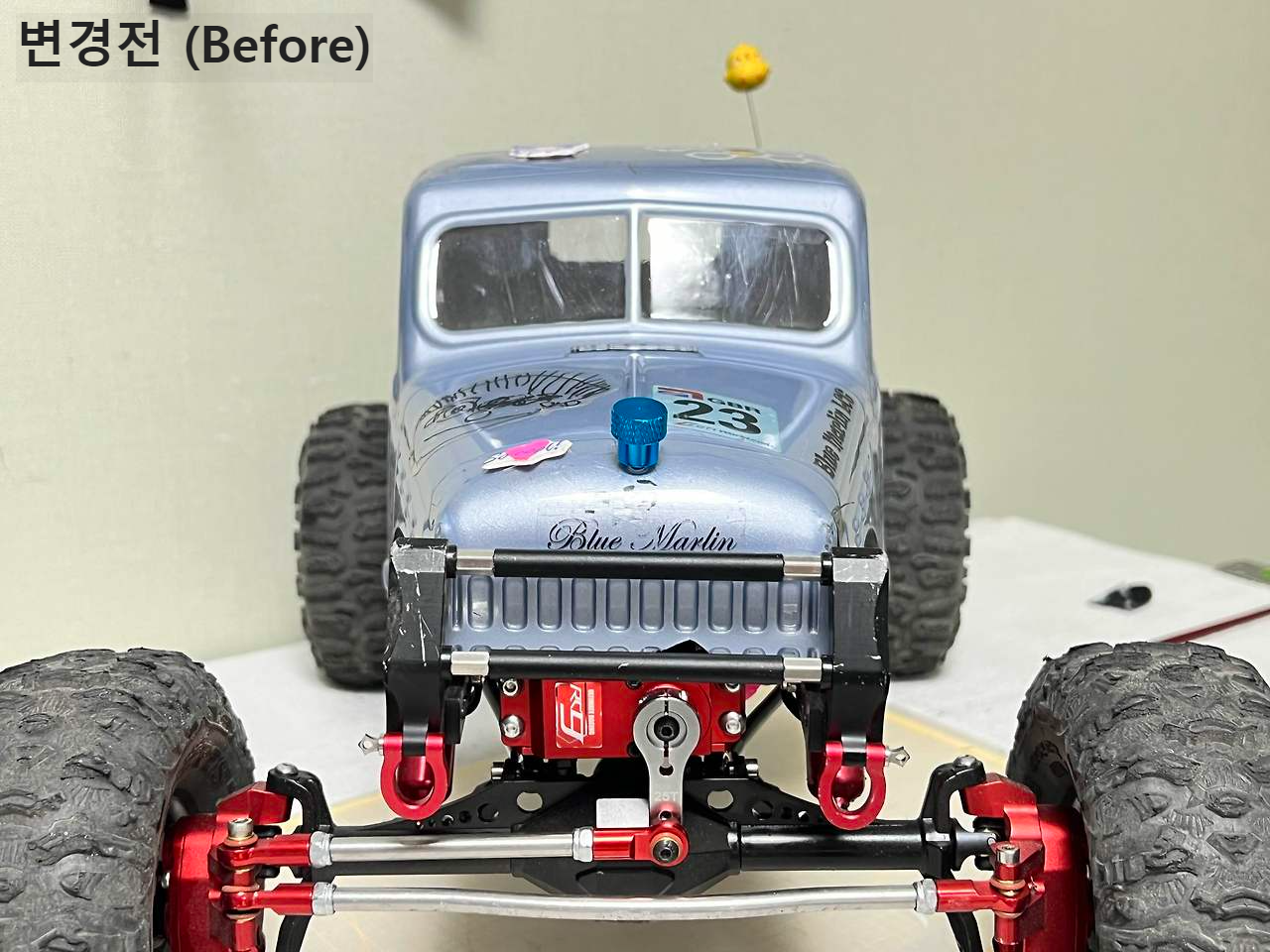
그 샷시에 본격적으로 차체를 올려 보도록 하겠습니다.
테스트 삼아 만들어본 렉산(폴리카보네이트 샷시)에 마운트 되어있는 G4차체.
G4는 디라이크 하이브리드 RE-R의 카피 버전으로, 카피버전답게 모든 부품이 동일하고 정품과 호환되는 특징이 있습니다.
드리프트 유저인 지인분께서 한번 만들어 보라고 기회를 주셔서 제작해 보도록 하겠습니다.
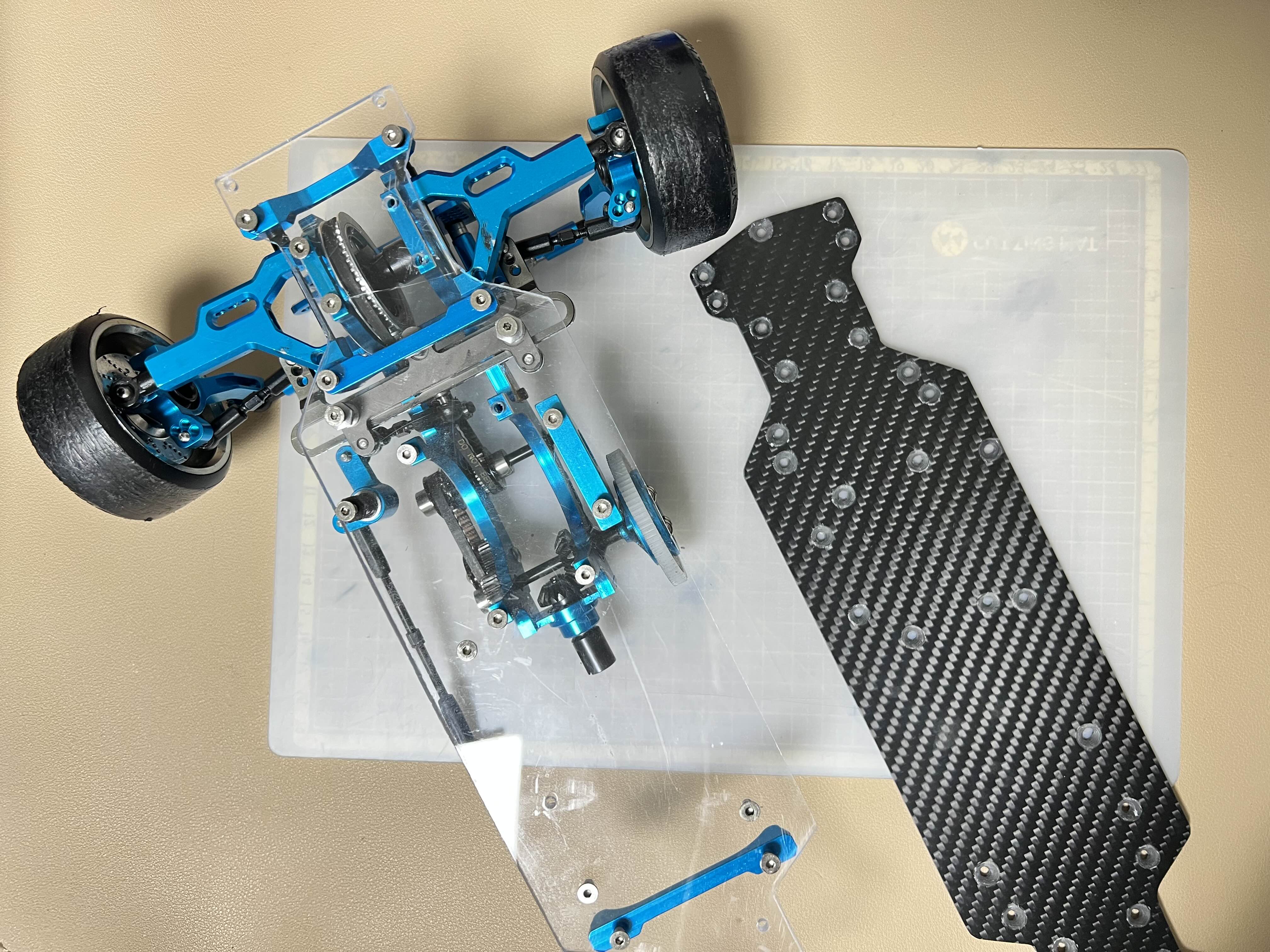
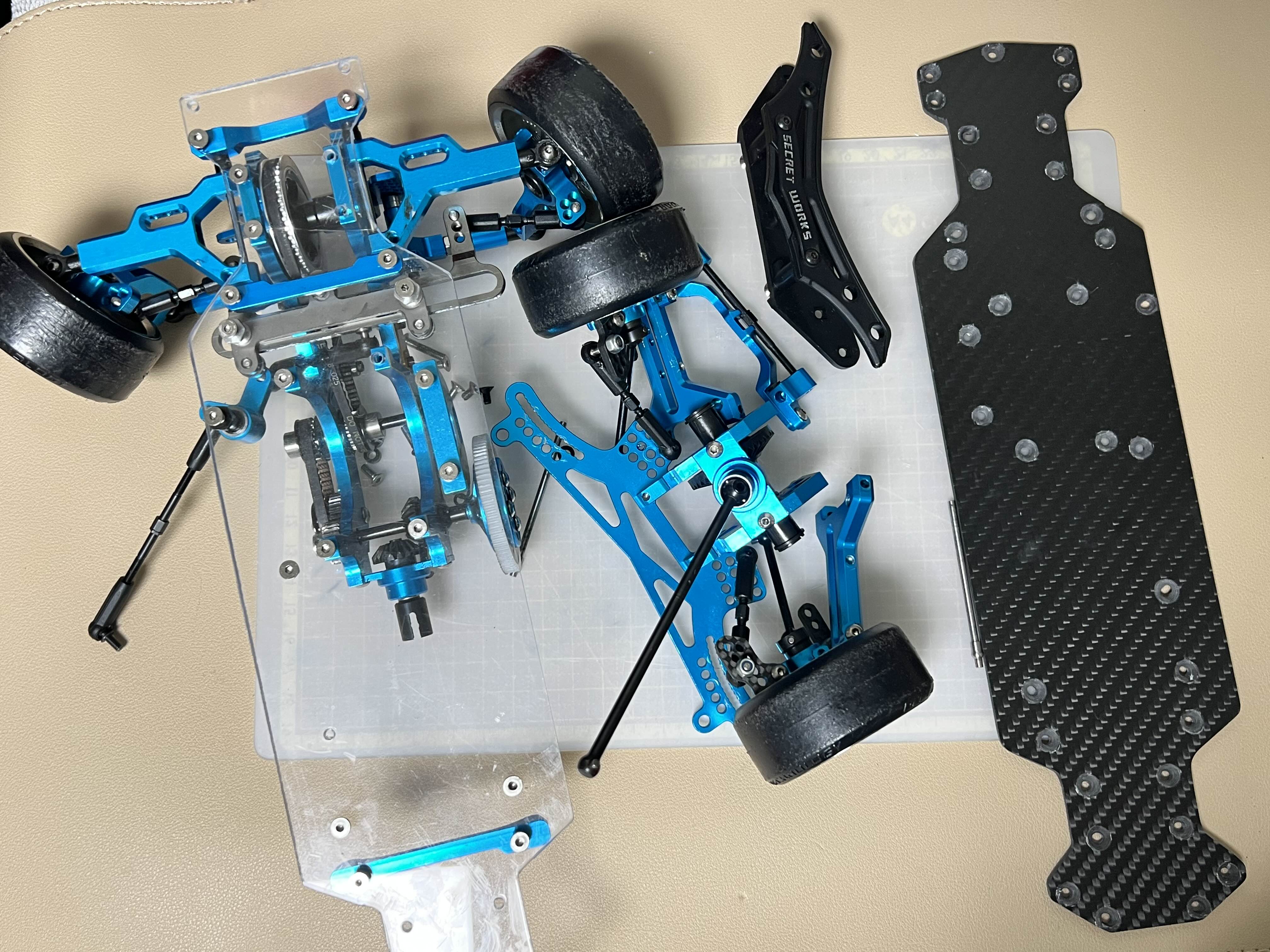
G4 차체와 제작한 225 샷시, 그리고 육각렌치 공구를 준비해줍니다.
우선 도면을 보면 앞쪽에 배치된 모터의 동력을 리어쪽으로 넘겨주는 역할이 가운테 유니버셜 센터샤프트 47mm가 필요하겠네요
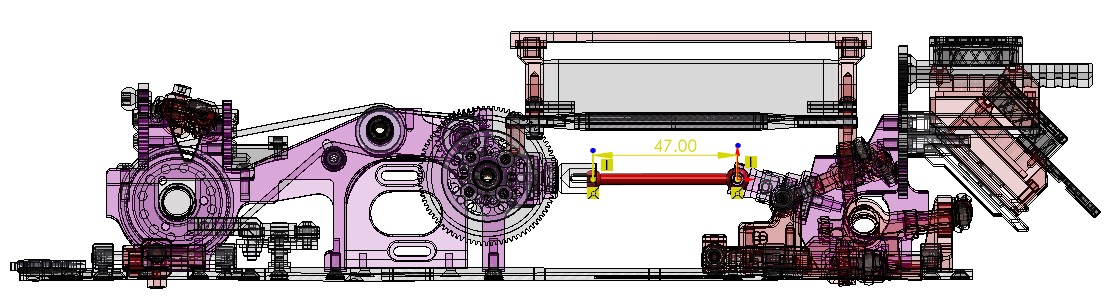
※ 위 설계도는 GBWK에서 제작하였으며, 이미지 사용 승인을 받은 상태임을 밝힙니다.
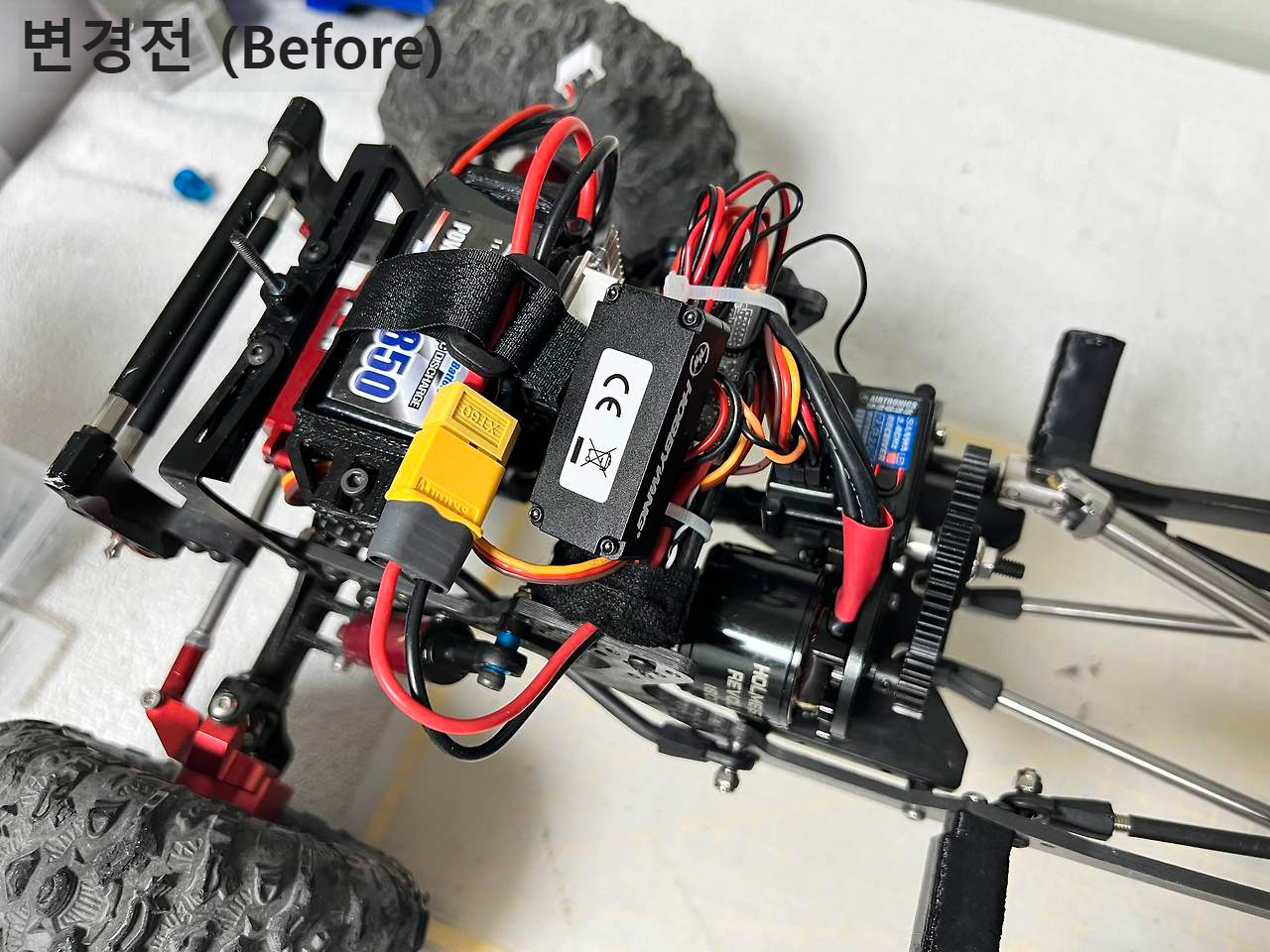
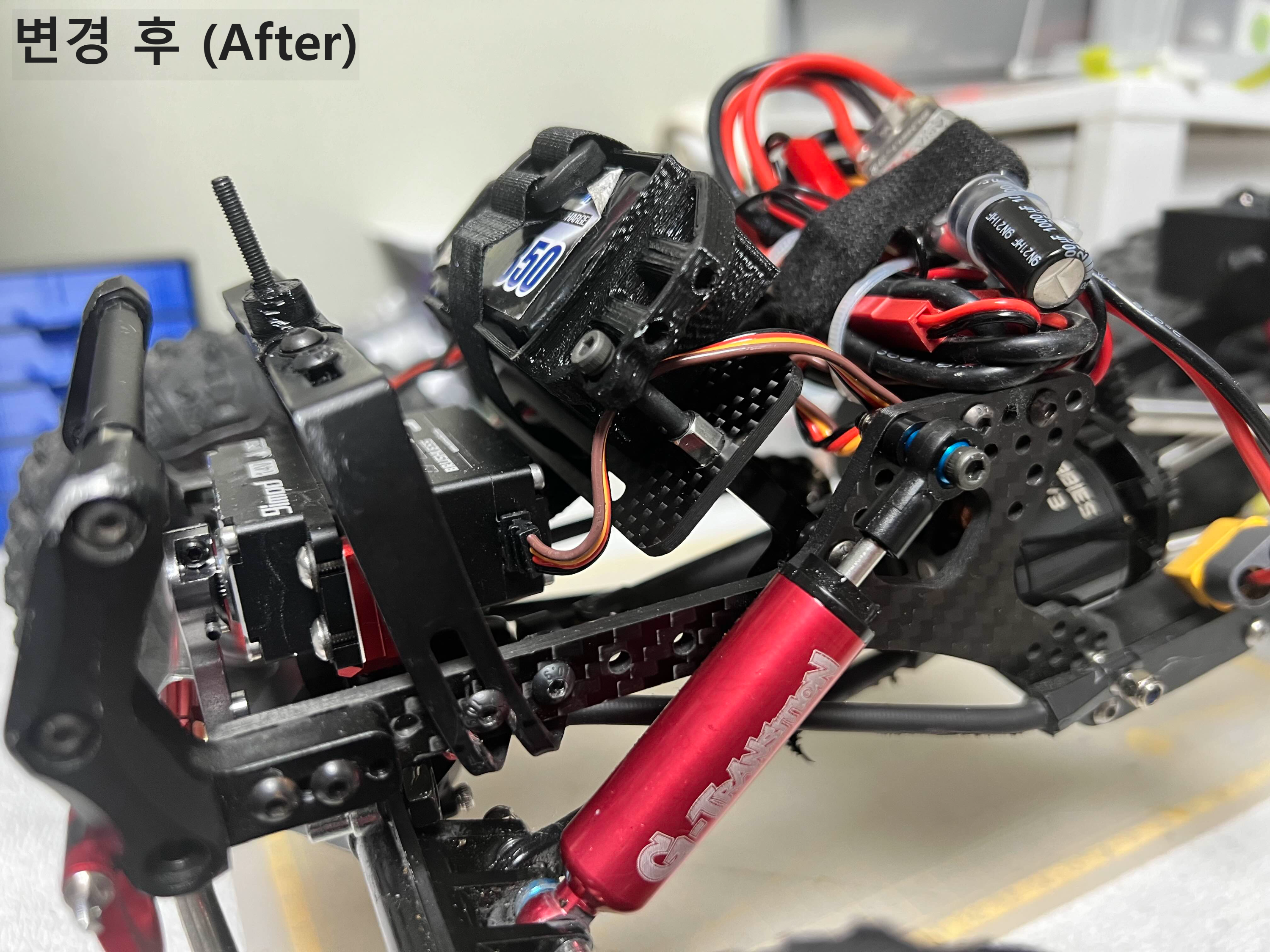
아무래도 휠베이스가 짧아짐으로써 그만큼 공간이 협소하다보니 변속기와 서보의 위치등은 좀 고민을 해봐야 할 필요가 있어보입니다.
https://ko.aliexpress.com/item/1005006203504320.html
금속 전면 후면 구동축 CVD 구동축, YOKOMO YD2 YD4 YD-2Z YD-2ZX YD-2S YD-4 RC 자동차 업그레이드 부품, 47mm 5
Smarter Shopping, Better Living! Aliexpress.com
ko.aliexpress.com
알리에서 냉큼 주문합니다.
몇일 배송기간이 소요되므로, 그동안 차량을 완성시켜 준비해놓으면 되겠군요.
그렇게 준비를 마치고
렉산샷시에서 모든 부품을 제거하고 카본 자작샷시에 옮겨줍니다.
프론트 부터 옮겨주고
그다음 리어 차례로 장착해줍니다.
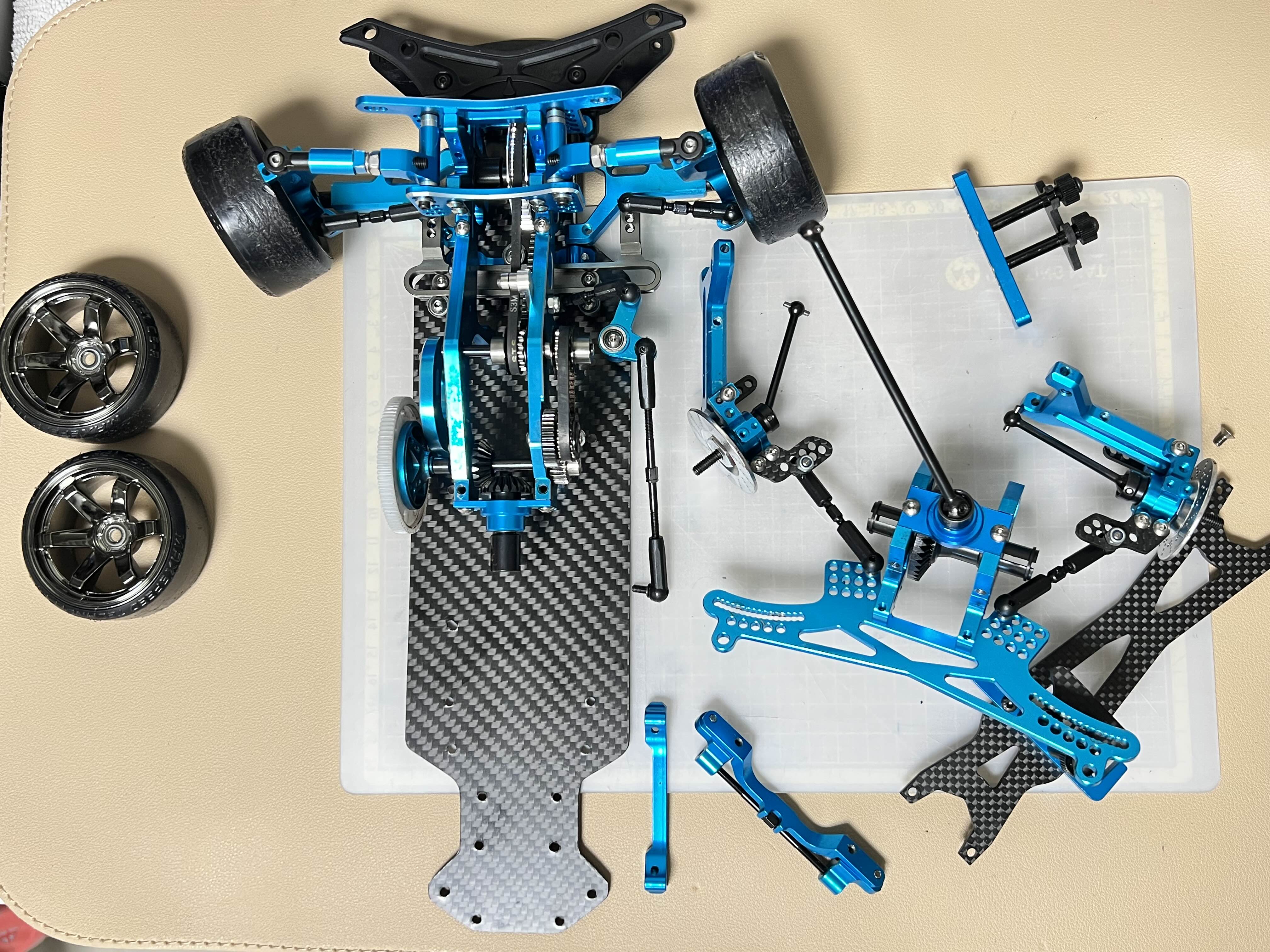
우선 차체는 완성.
간단하게 모두 옮겨주니 원래 이차의 휠베이스 였던 260mm에서 사용하던 센터샾트의 길이가 넘쳐납니다.
또 생각치도 못했던 어퍼 데크(Upper Deck) 길이도 길어 장착이 안되네요.

그동안 주문한 47mm센터샤프트가 도착했습니다.
그리고 디프 기어가 강화프라스틱이었기에 RPM 회전수를 좀더 올리고 무게감을 주기 위해 하이브리드용 DL325-2 부품을 구입했습니다.
- 리어 베벨기어가 기존 20T → 12T로 줄어들어 회전수 증가
물론 47mm 센터샤프트를 연결하기 위한 목적이기도 하구요.

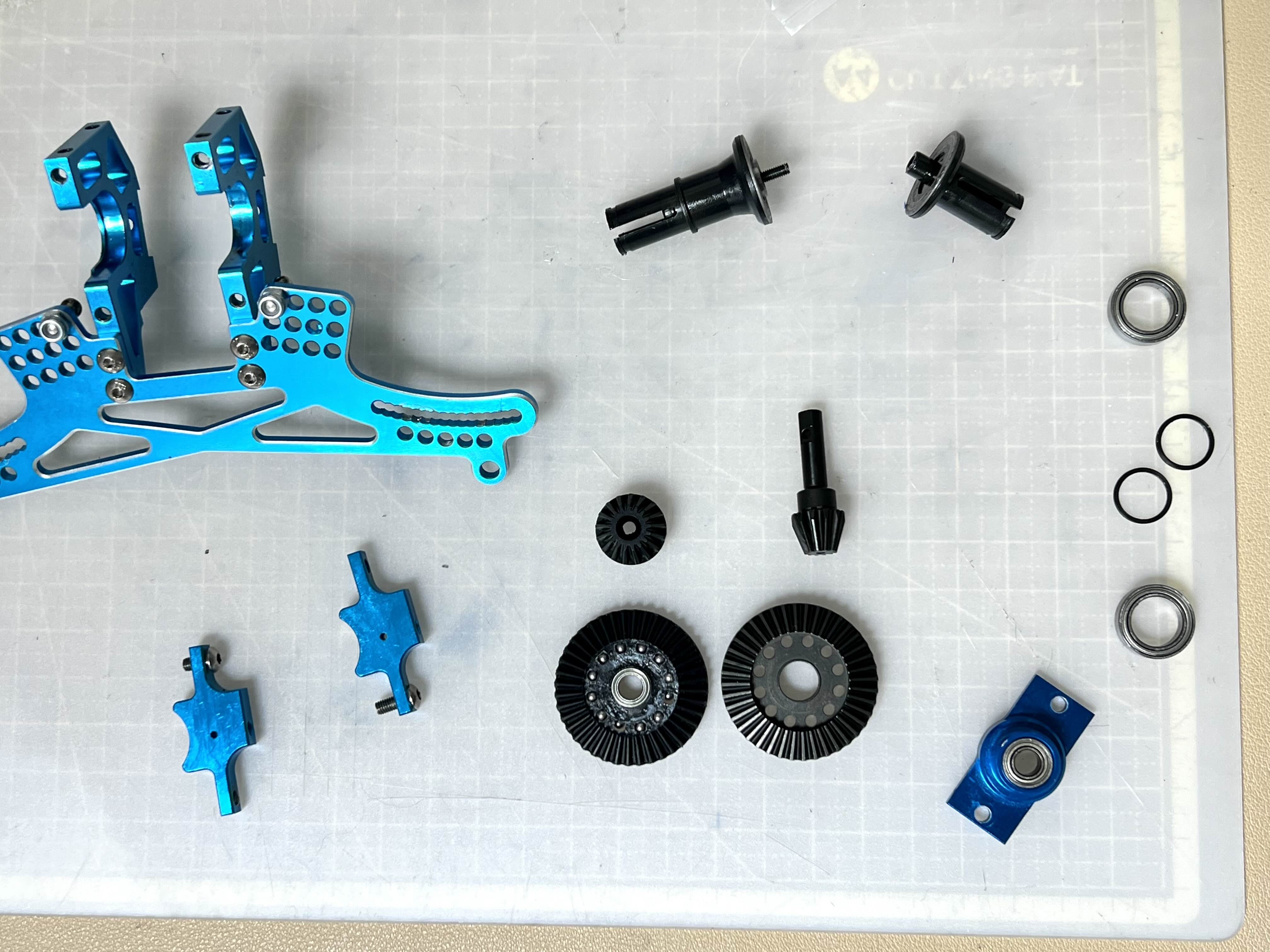
리어 쇽타워를 제거 후 기존 볼디프 기어를 빼네고
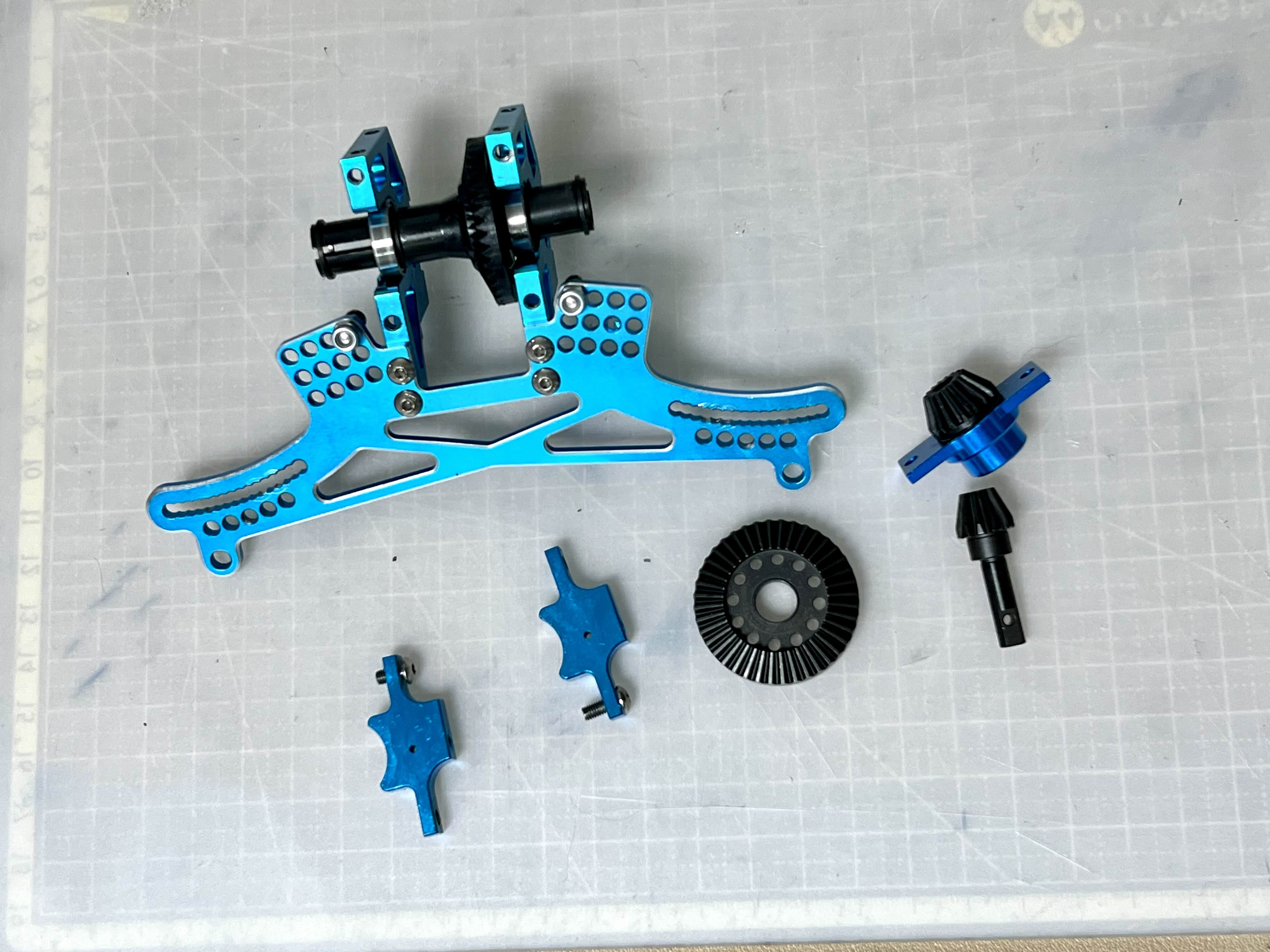
내부 볼을 모두 옮겨준 다음 메탈 볼디프 기어로 변경해줍니다.
조립은 분해의 역순.
하나씩 실수없게 잘 조립해서 모두 완성!
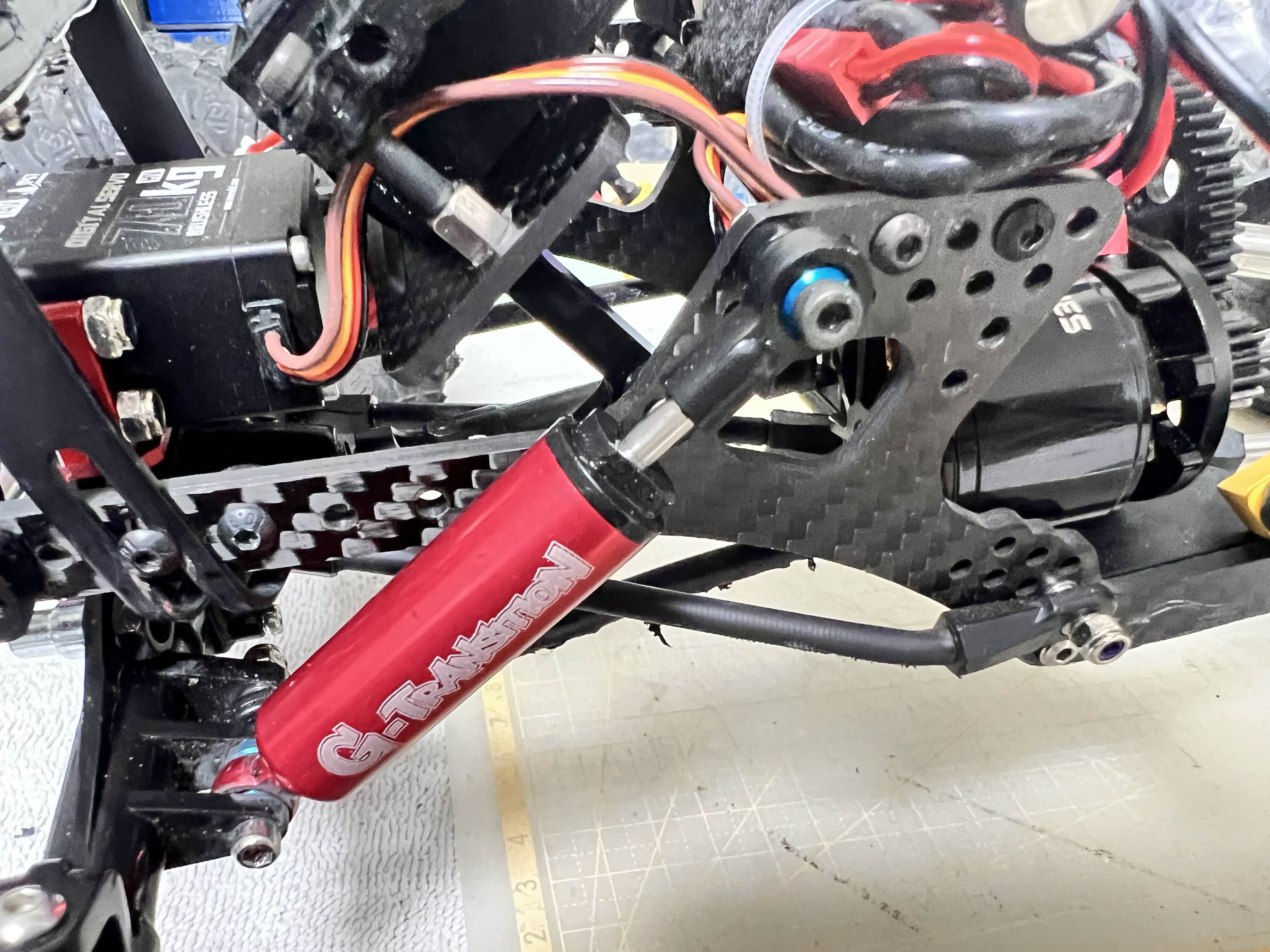
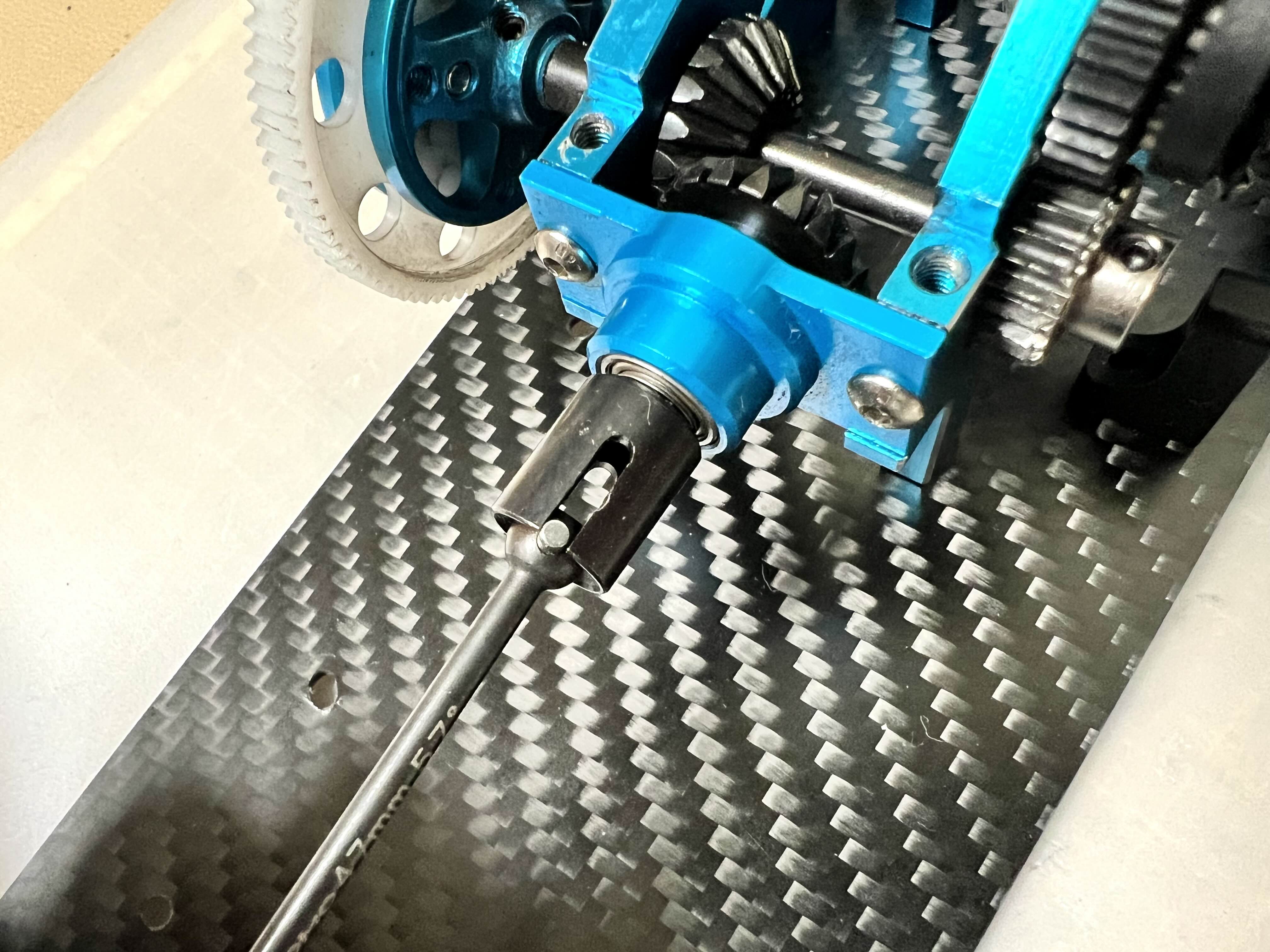
바로 구입했던 47mm 센터 샤프트를 연결해봤습니다.
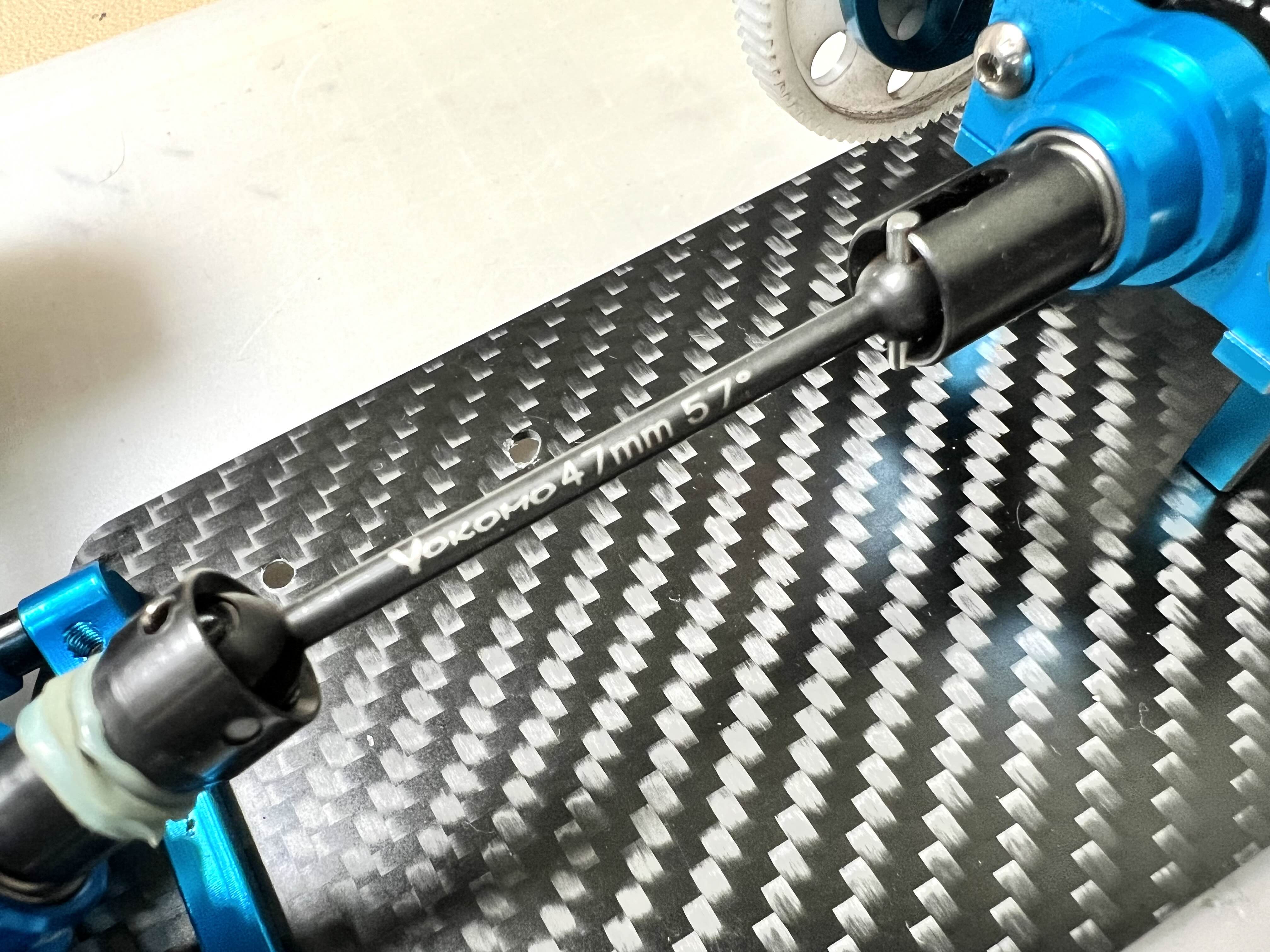
음.. 잘 맞긴 한데, 드라드컵에 간당간당하게 물려있는 상태..
고속으로 회전시 잘못하면 빠질수도 있을것 같기도 하고
뭔가 안정적인 맛은 없어보이네요..
어찌할까 여러 고민을 해봅니다.
방법 1. 샤프트의 길이를 47mm 보다 2~3mm긴 샤프트로 구한다.
→ 짧은 길이의 샤프트는 쉽게 구할 수 있는 길이가 47mm, 이상 살짝 긴 길이의 샤프트는 많지 않고 그나마 있는 샵에 문의시 모두 품절로 구하기 어려운 상태.
방법 2. 샤프트의 끝부분에 하브에서 사용하는 프로텍터를 사용한다.
→ 프로텍터가 있으면 아무래도 보완은 되겠지만 그래도 짧은 길이의 샤프트사용이라는 근본적인 원인인 제거되지 않음. 하지만 현재로써 가장 쉽게 해볼 수 있는 방법.
방법 3. 드라이컵의 길이를 연장한다.
→ 이건 생각만 해본건데, 컵의 길이를 용접등을 통해 살짝 길게 해서 샤프트가 빠지지 않게끔만 하면 되지 않을까 라는 상상.. (직접 용접이 어려우니, 비용을 들여 주문작업을 해야하고 성공 가능성도 모르는일..)
그래서 우선 당장 쉽고 빠르게 해볼 수 있는 2번 프로텍터를 적용해보기로 합니다.
마침 휠베 273mm 컨버전시 여분의 부품이 있어 추가 구매 없이 적용해 볼 수 있었습니다.
좌측 기존 순정 베벨기어와 우측 하브제로 컨버전 후 나온 여분 부품, 그리고 프로텍터를 준비합니다.
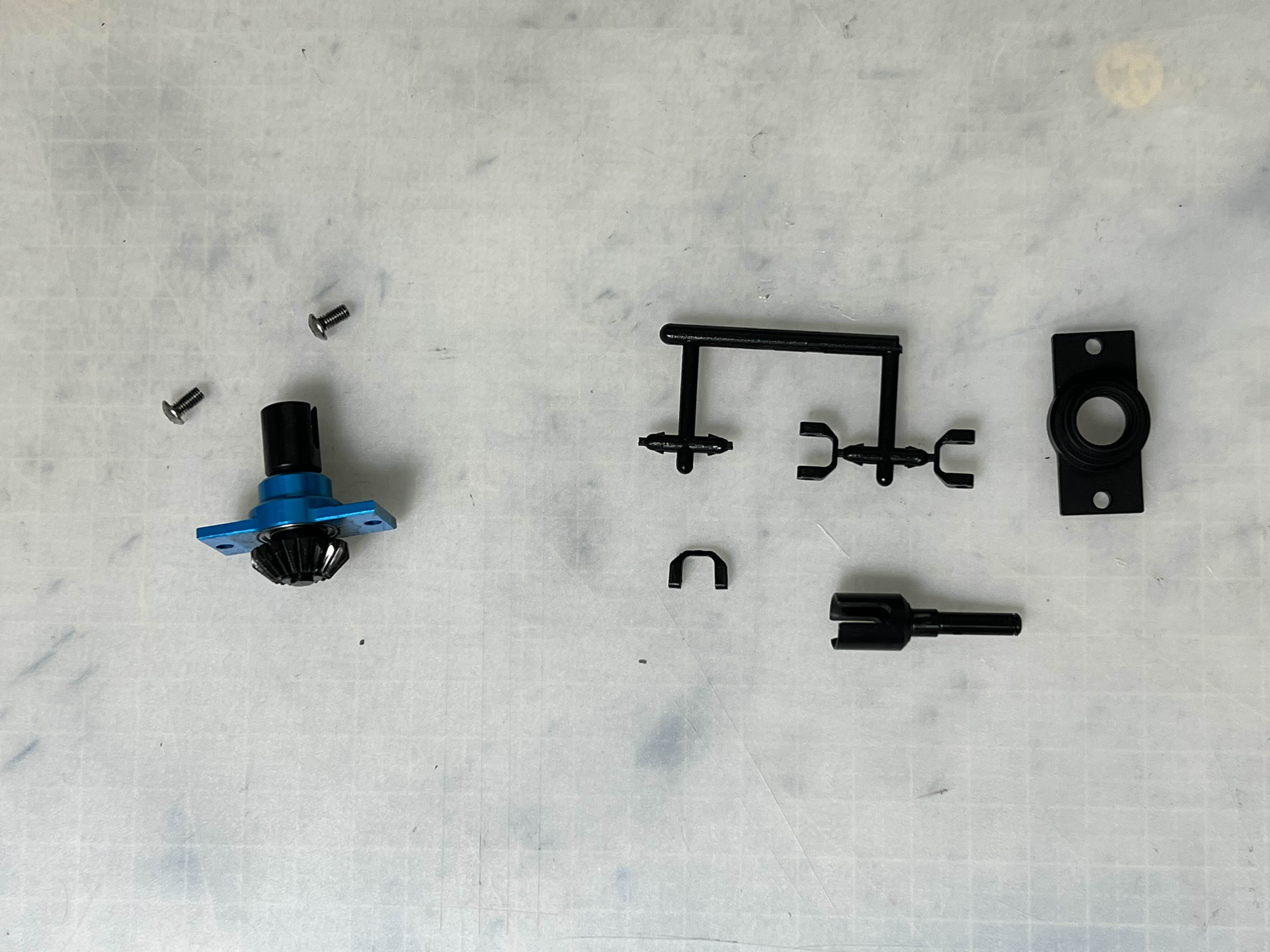
순정 드라이브 컵은 개뼈가 끼워지는 넓이가 얇아 프로텍터를 빼고 장착해야하지만
하브제로용 드라이브컵은 넓이가 넓어 프로텍터를 끼고 장착할 수 있습니다.
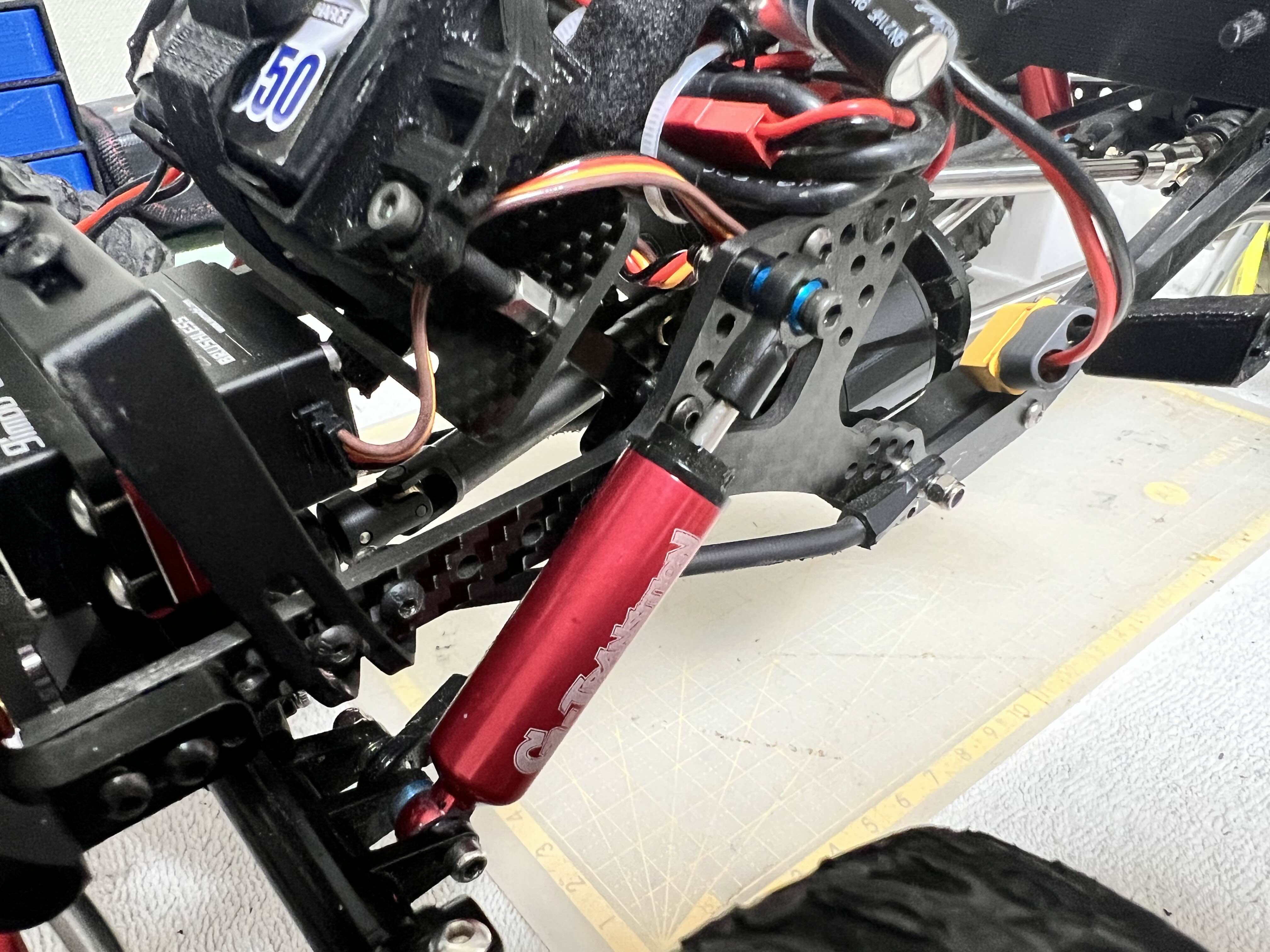
샤프트에 프로텍터를 달아주고 연결해줍니다.

좌측이 기존 순정 드라이브컵이고 장착되어진게 하브제로용 프로텍터가 사용 가능한 드라이브컵.
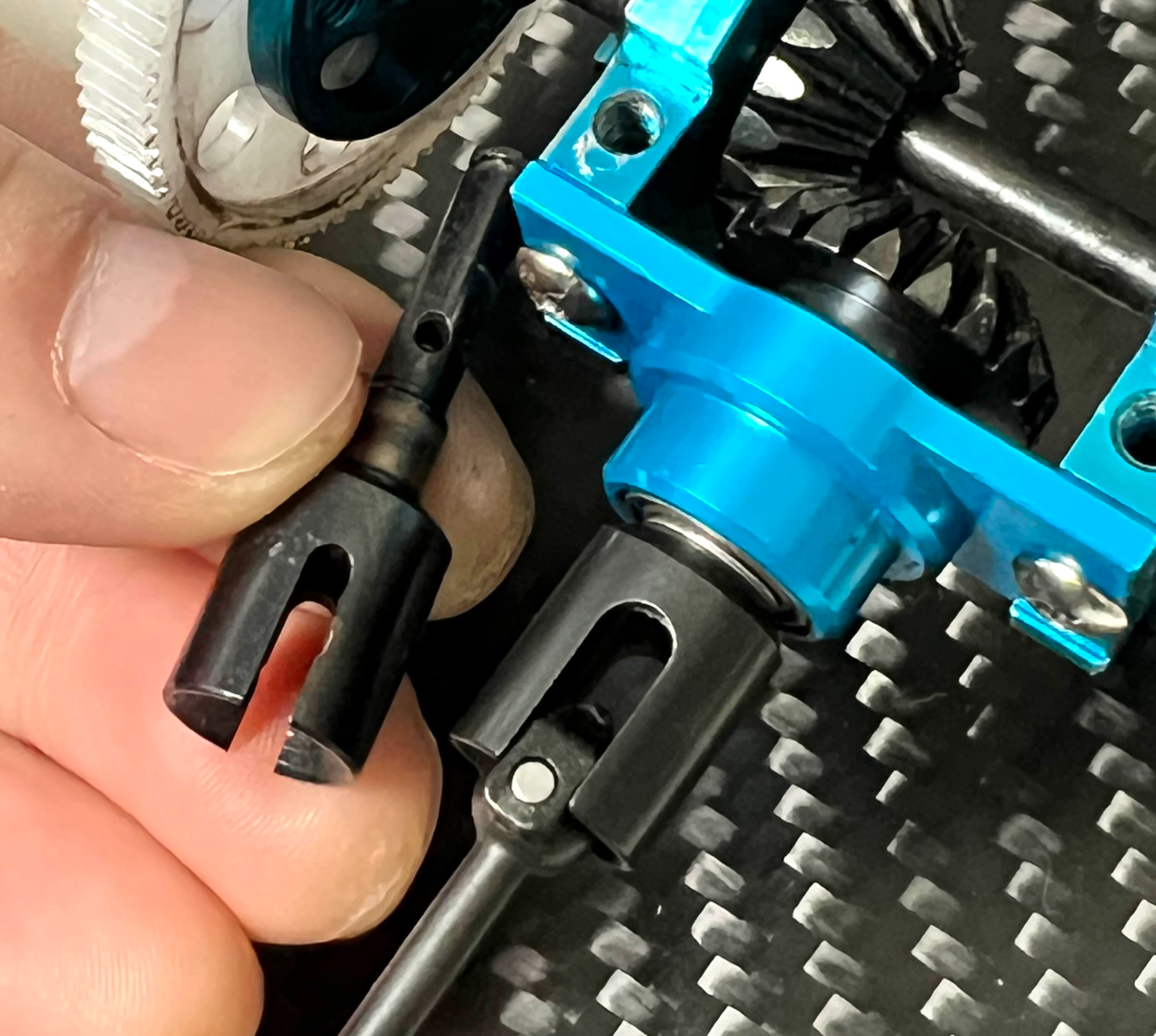
샤프트쪽 유격도 잡을 겸 심을 이용해 불필요한 공간의 움직임을 잡아주고 프로텍터를 끼우고 연결해주니
그래도 그나마 빠짐에 대한 우려는 좀 줄어들었지만, 그래도 여전히 해결된것 같지 않은 느낌..
샤프트는 좀더 찾아보고 구해봐야 할것 같습니다.
당분간 테스트 주행정도는 가능하니, 우선 이렇게 사용해보기로 하고
이어서 어퍼데크가 필요한 상황.
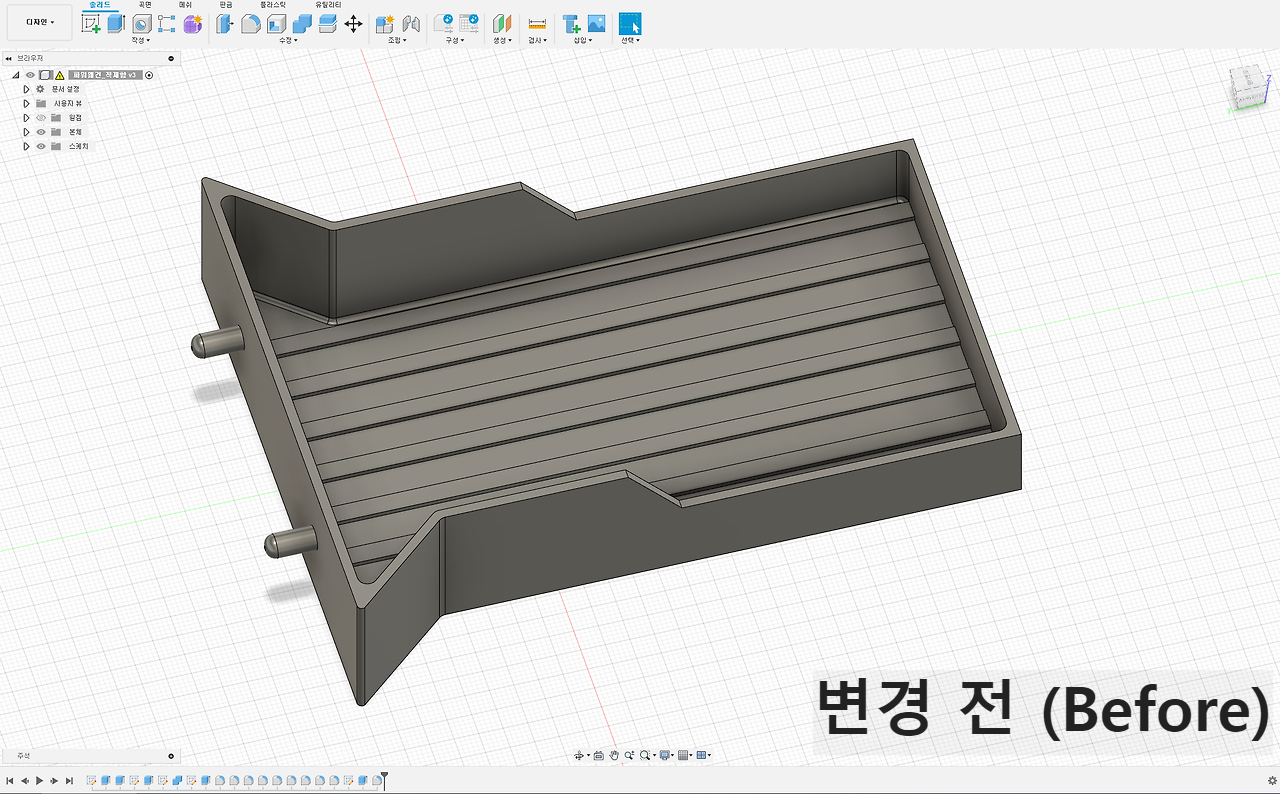
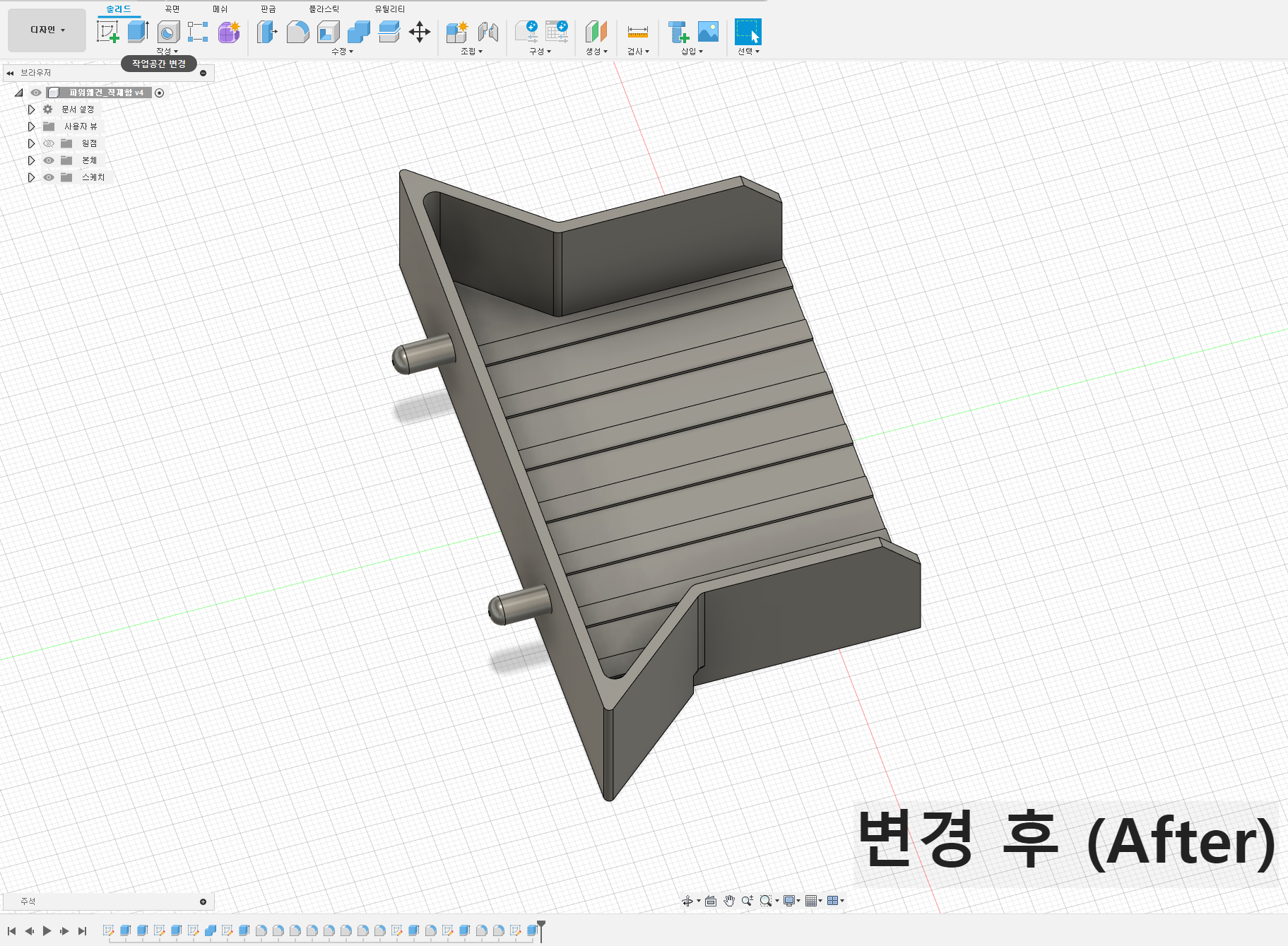
카본 제단은 우선 천천히 시간내서 만들어 보기로 하고 당장 필요한 것이니 빨리 만들어 낼 수 있는 3D 모델링을 해봅니다.
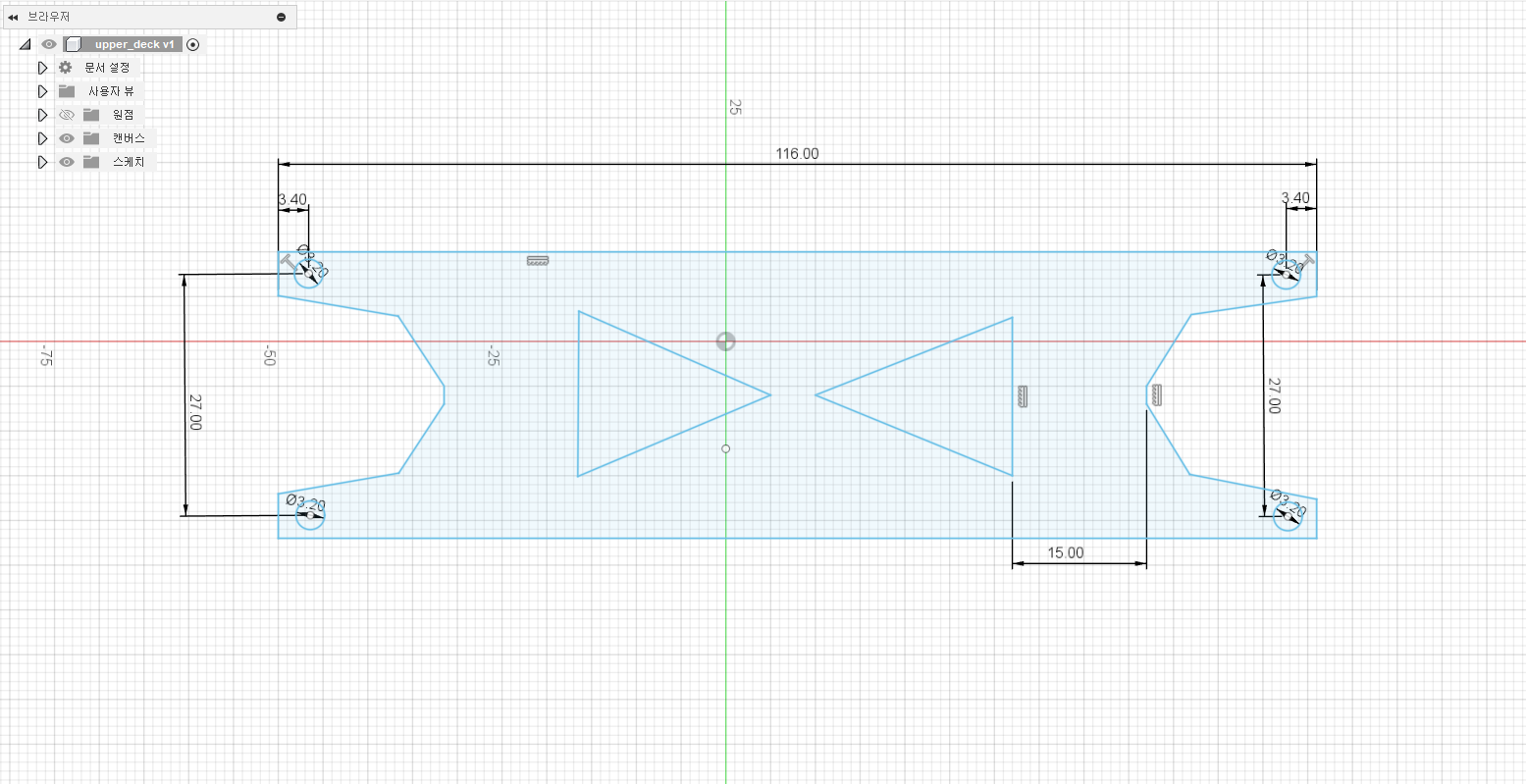
모양은 테스트용이므로 대략적인 모습만 갖추게 하고
돌출시켜 모델링을 완성
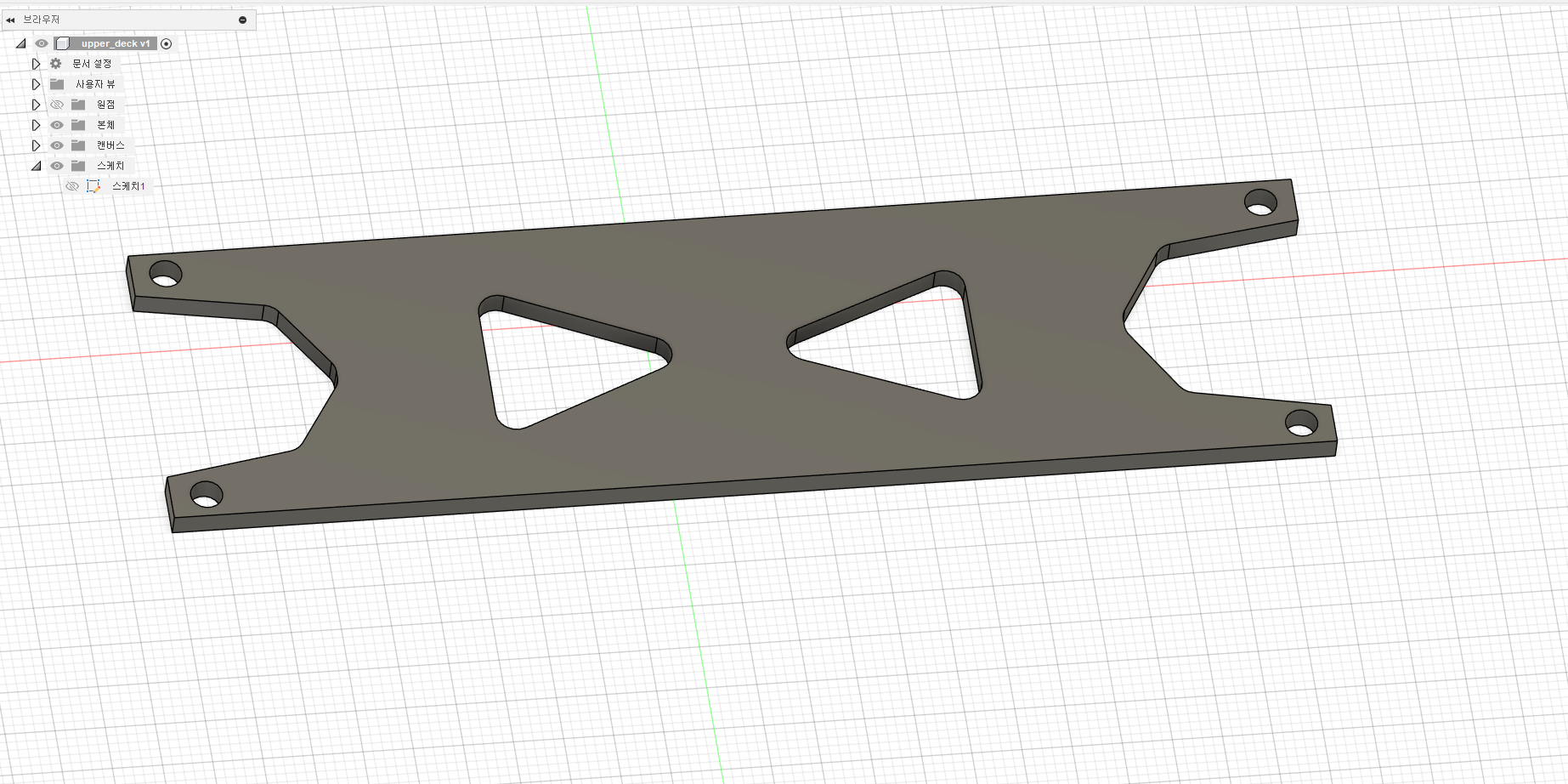
그대로 3D 프린터로 출력해서
잘 맞나 확인해보니
아주 딱 들어 맞게 잘 나와 주었네요~ 굿
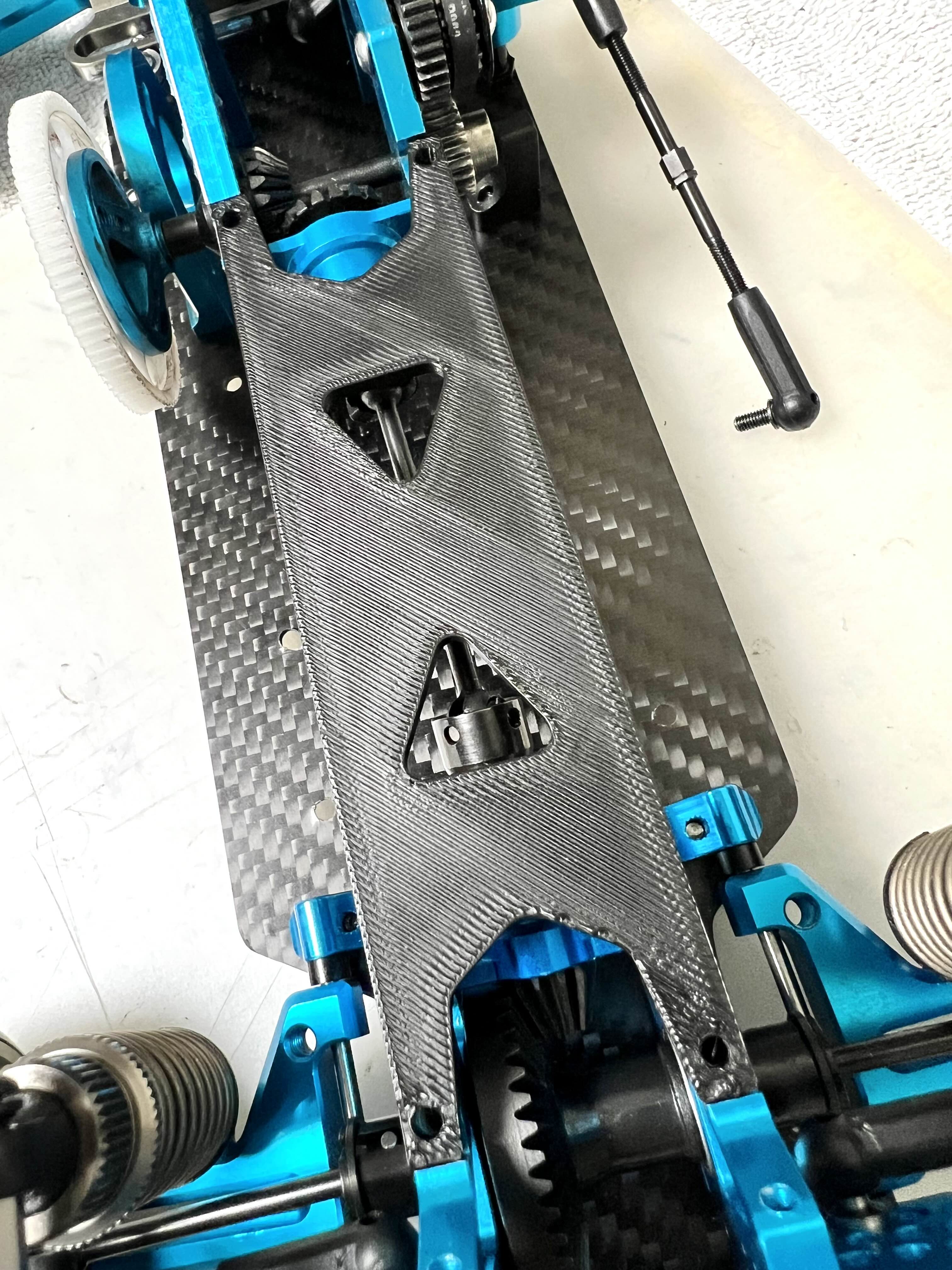
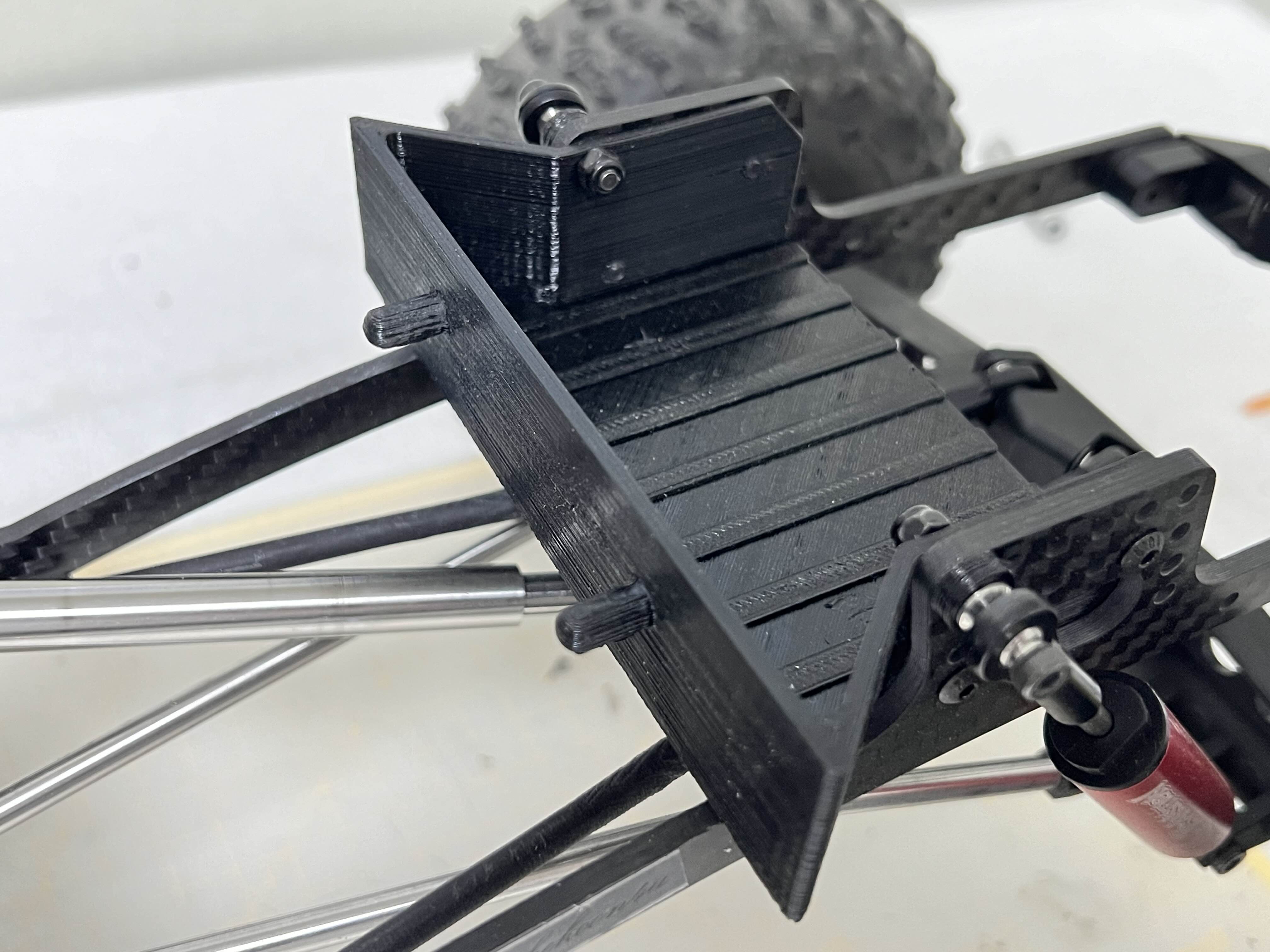
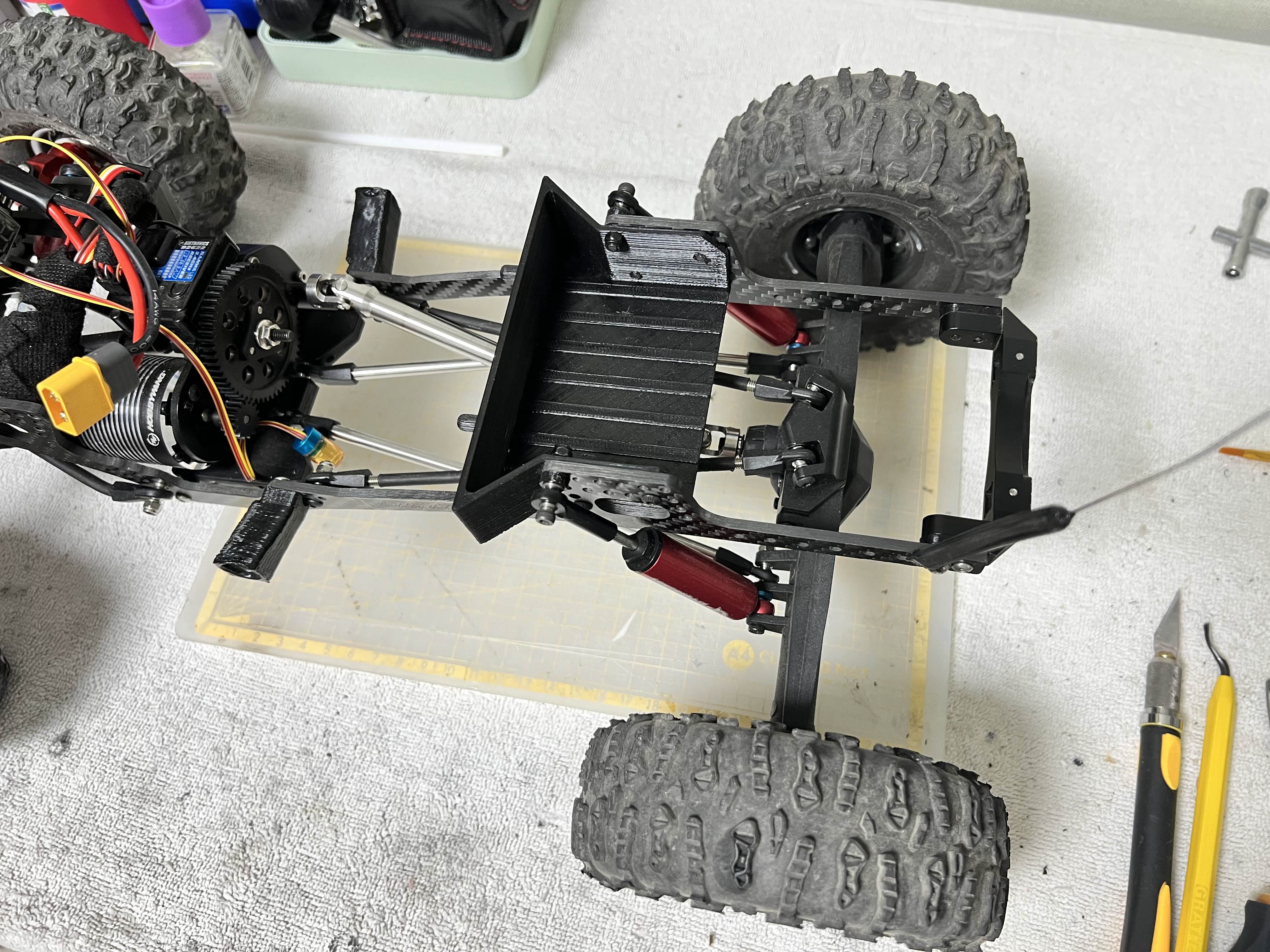
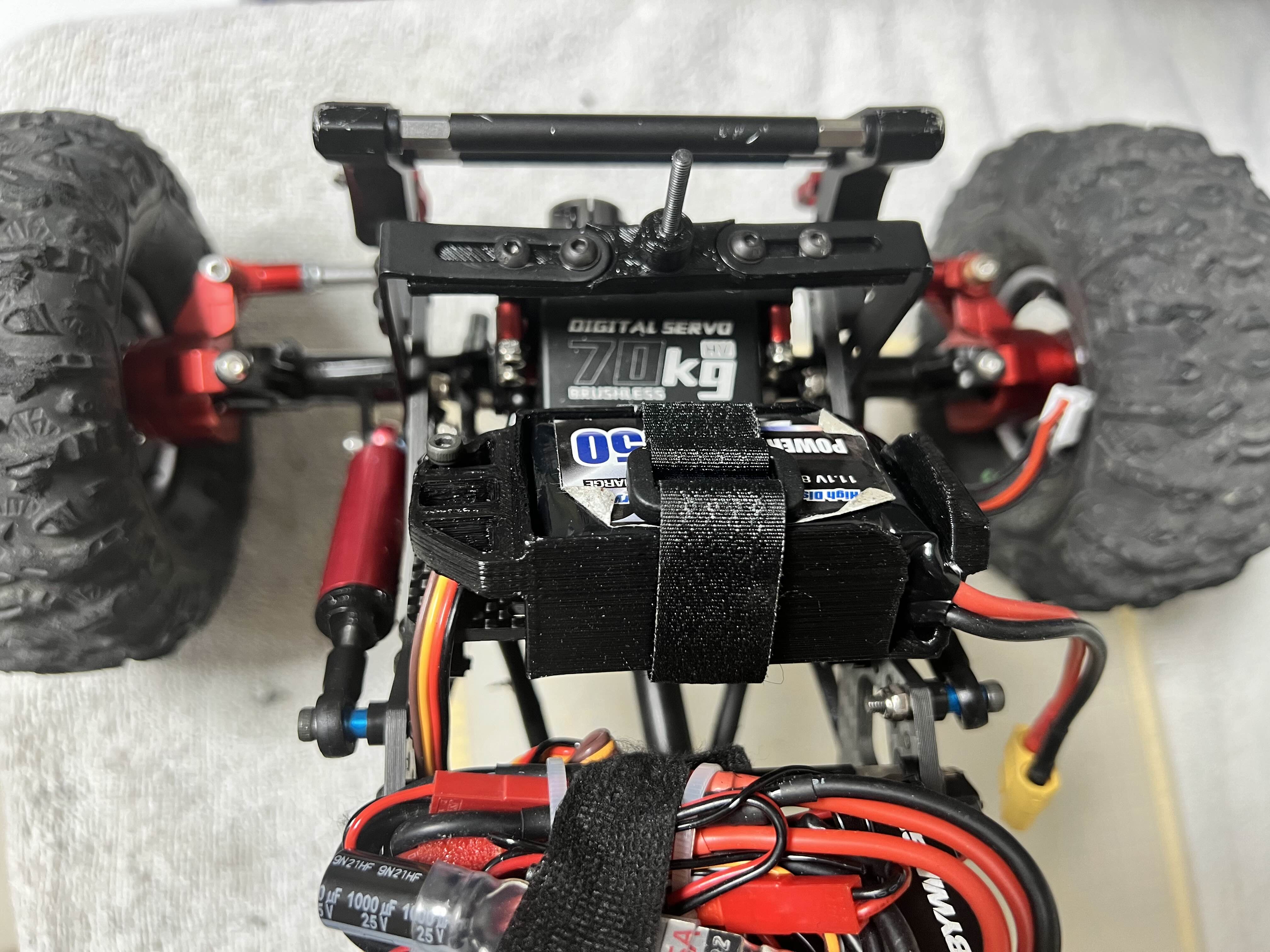
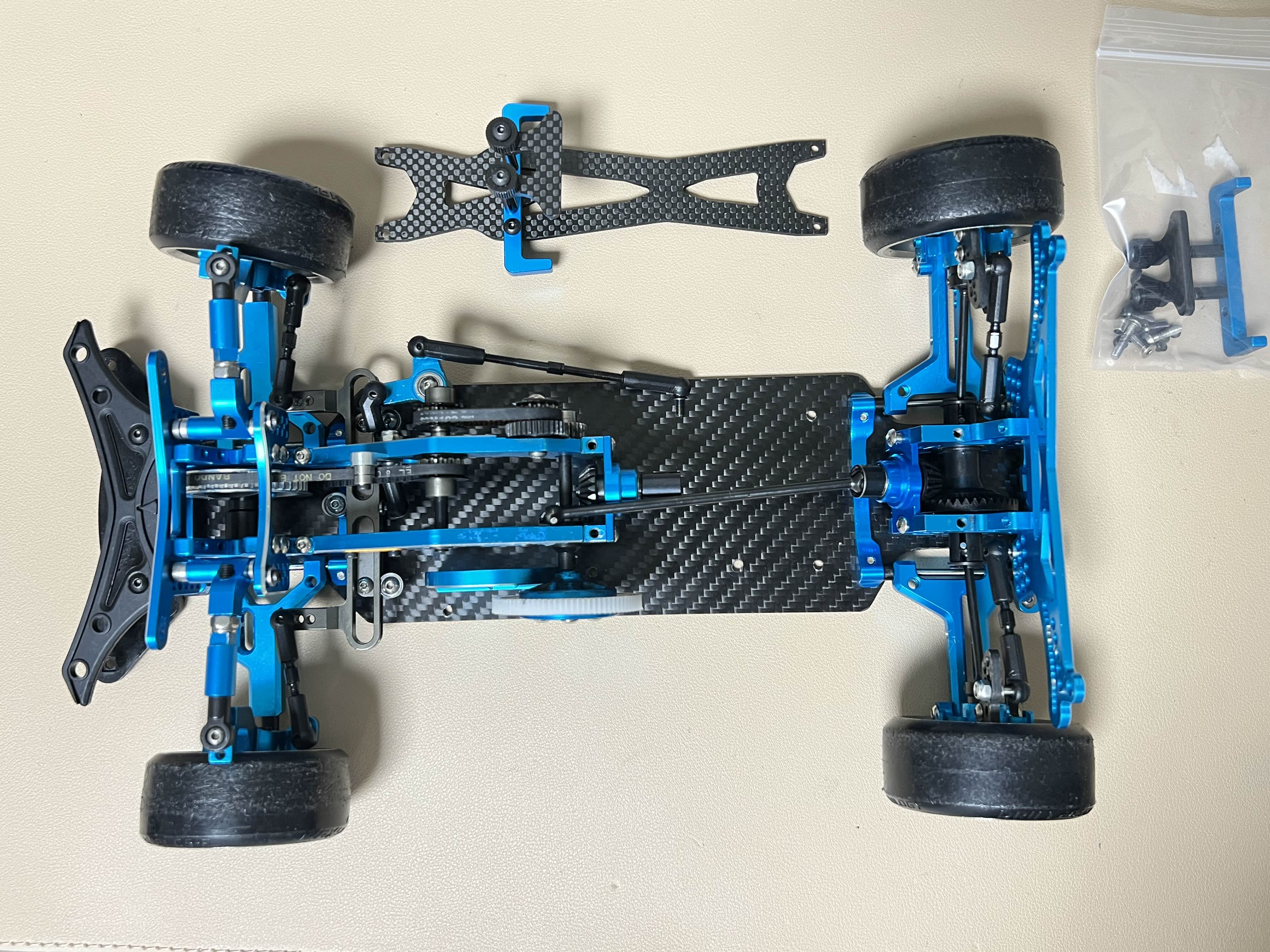
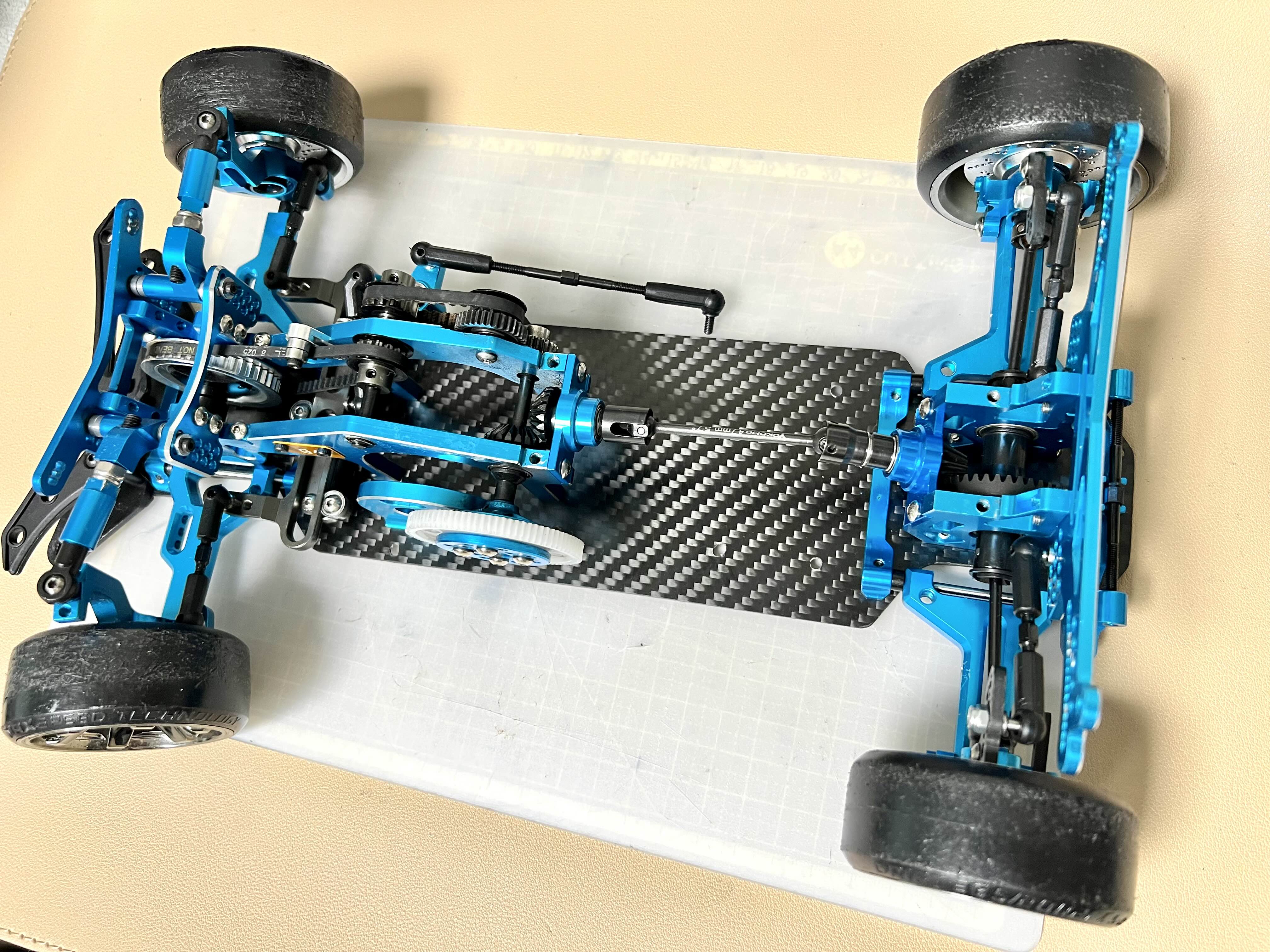
그렇게 어퍼데크까지 올리고
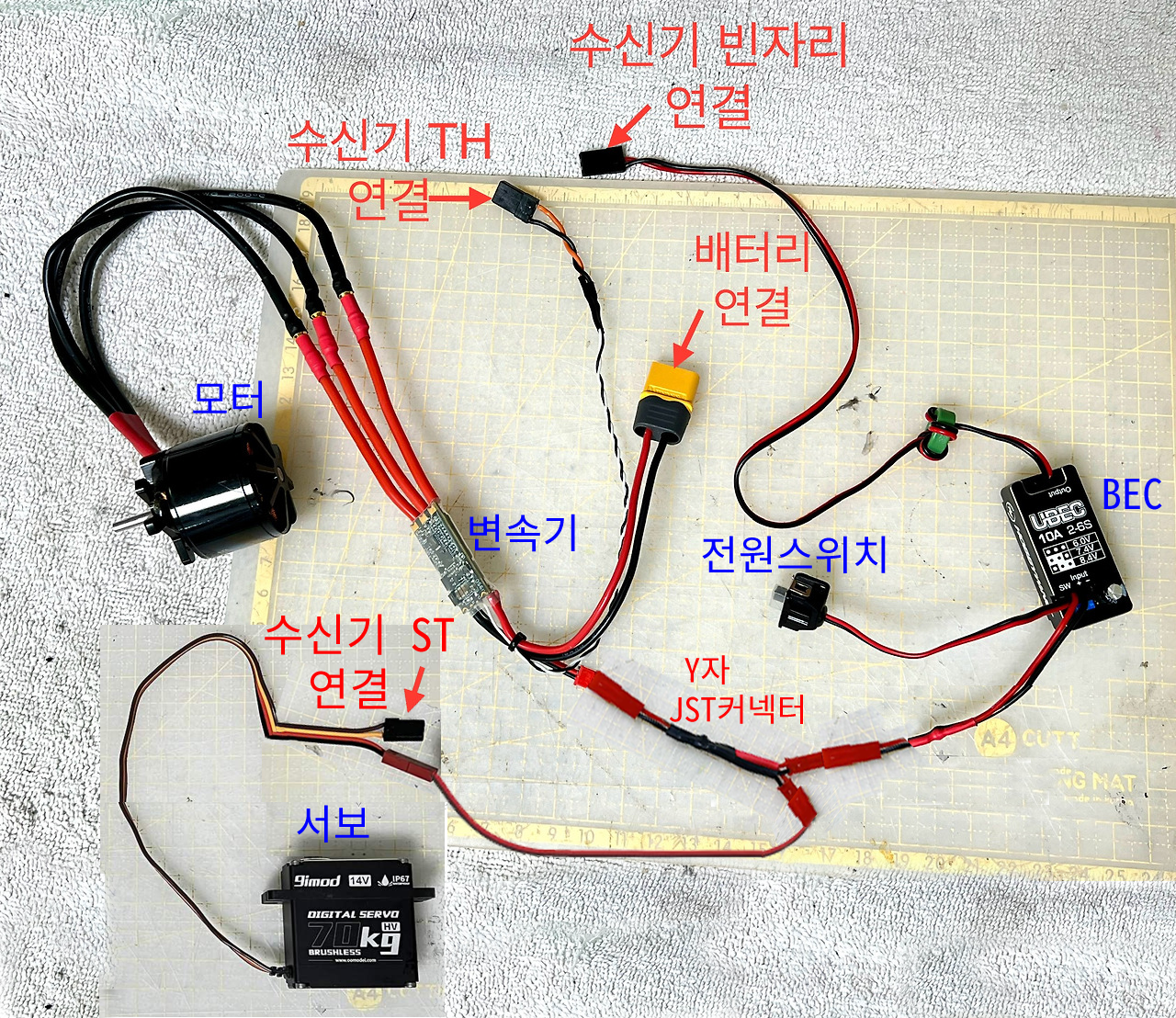
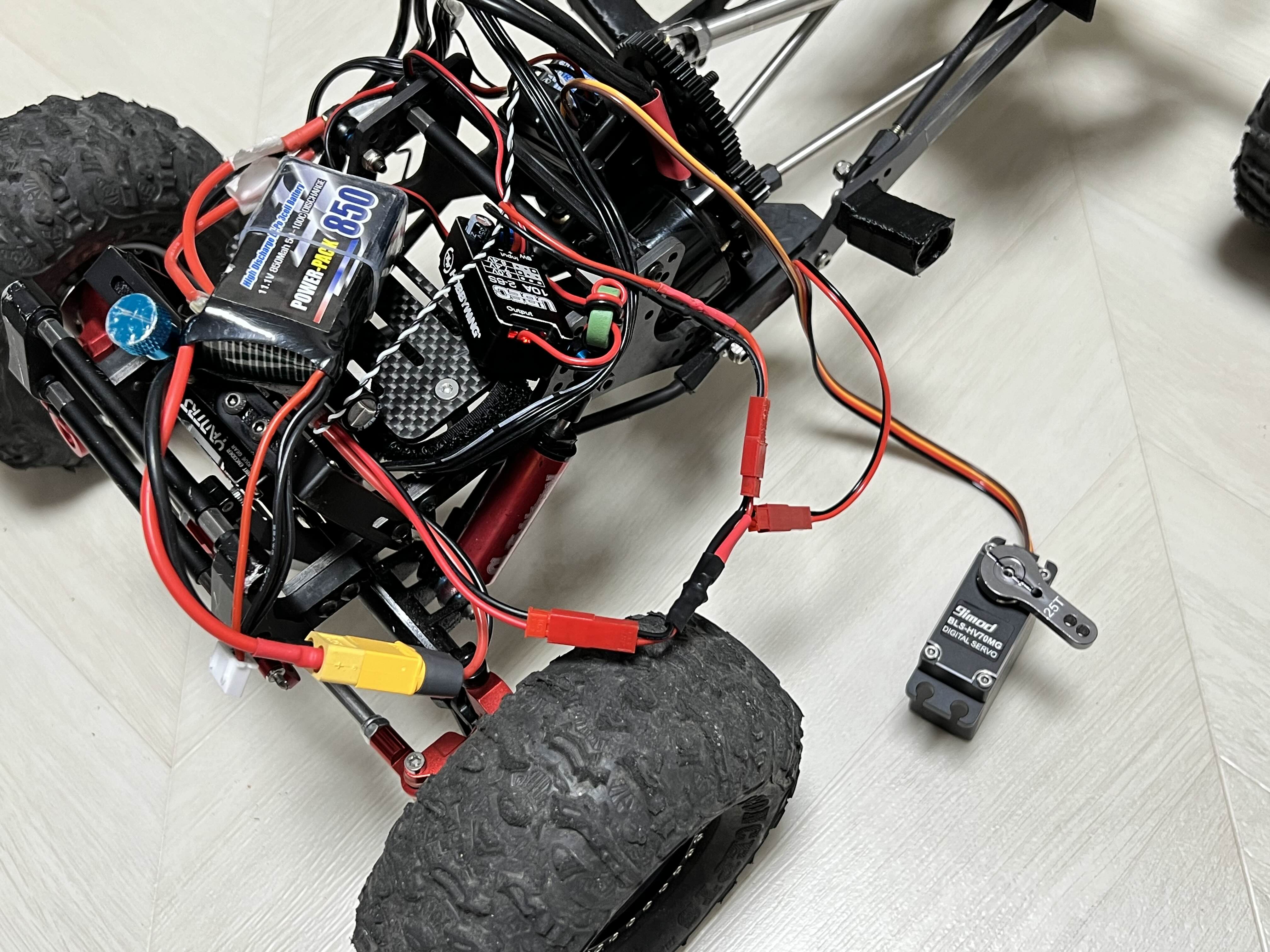
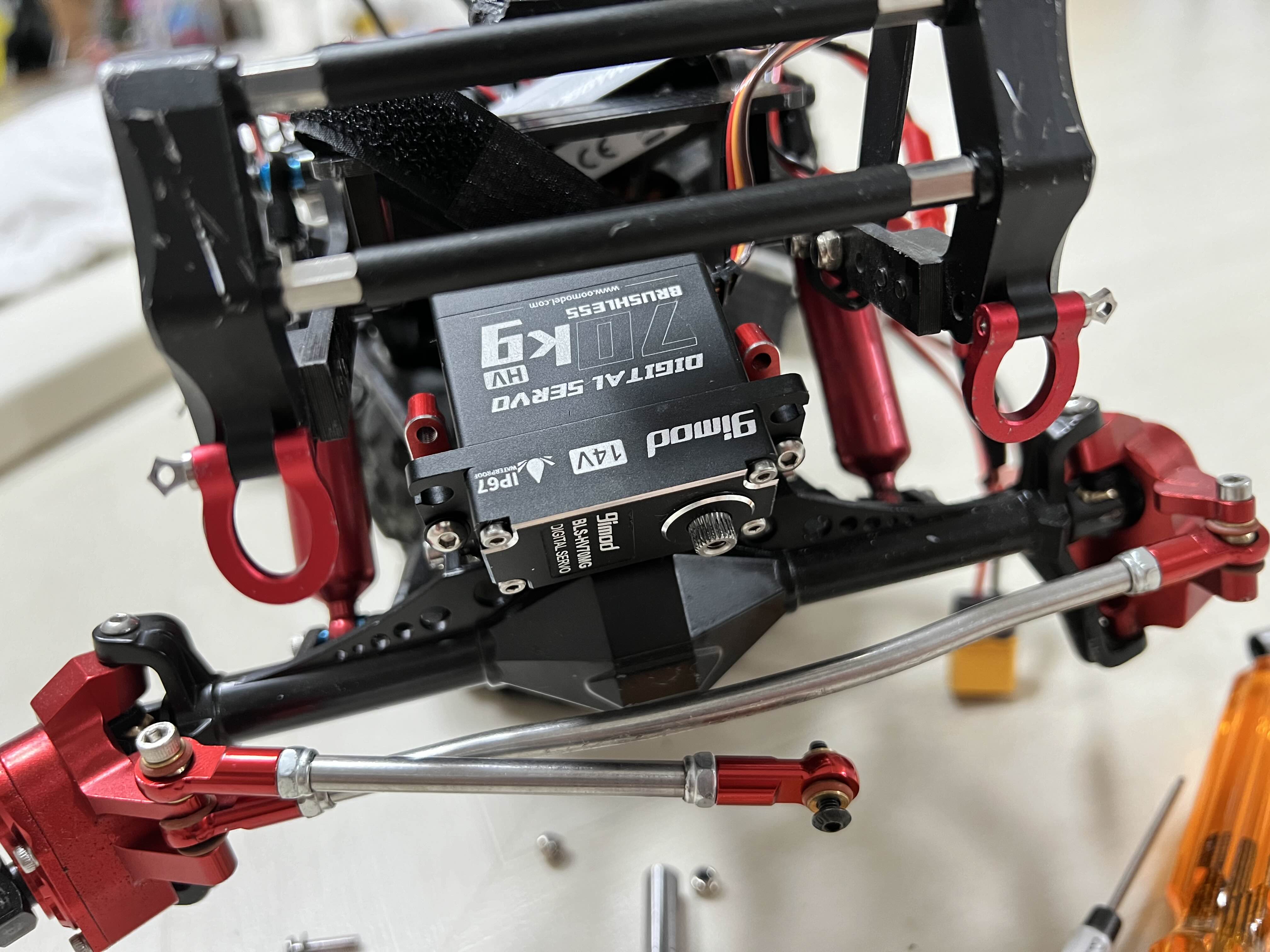
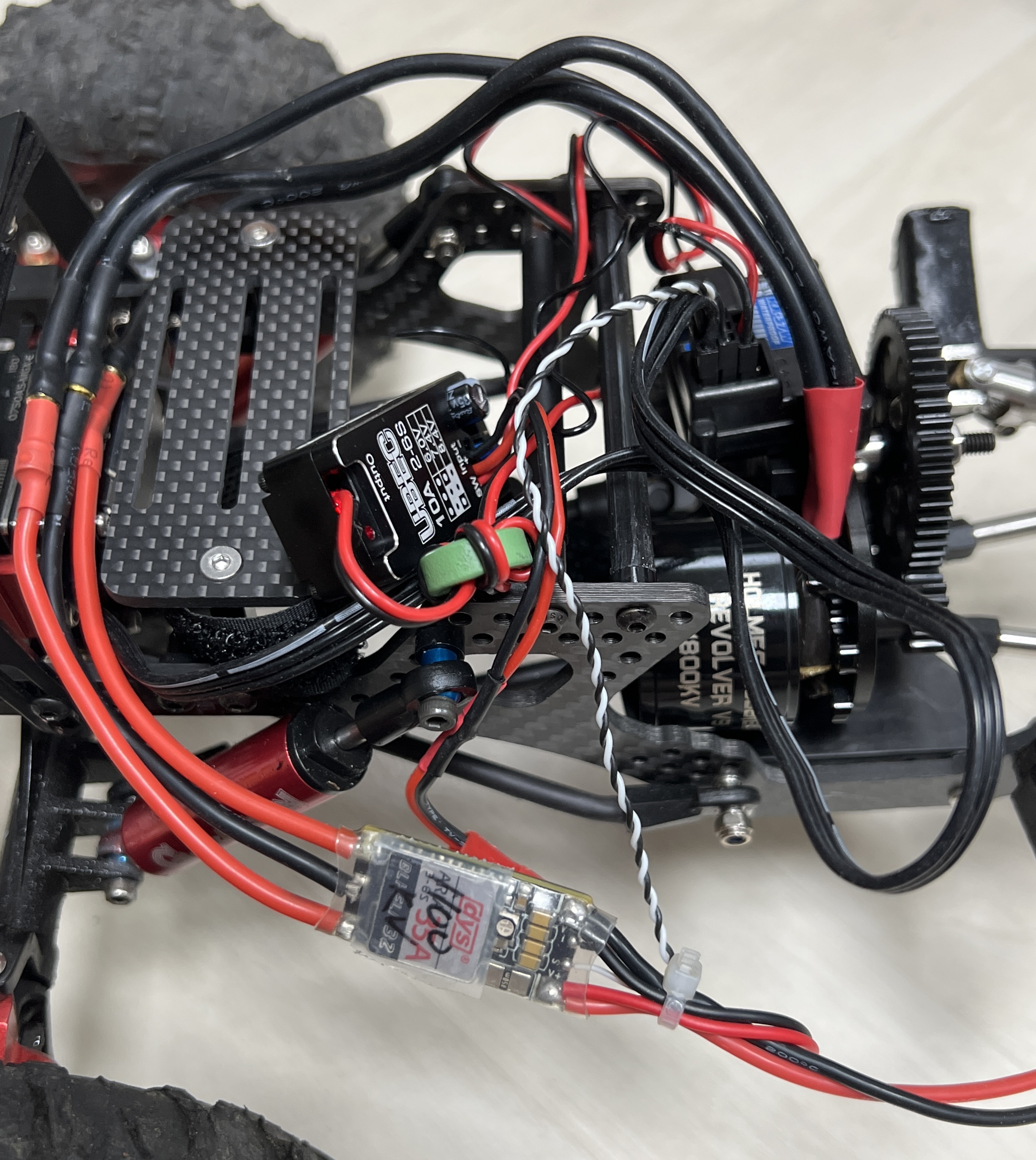
이어서 기자재를 올리려 합니다.
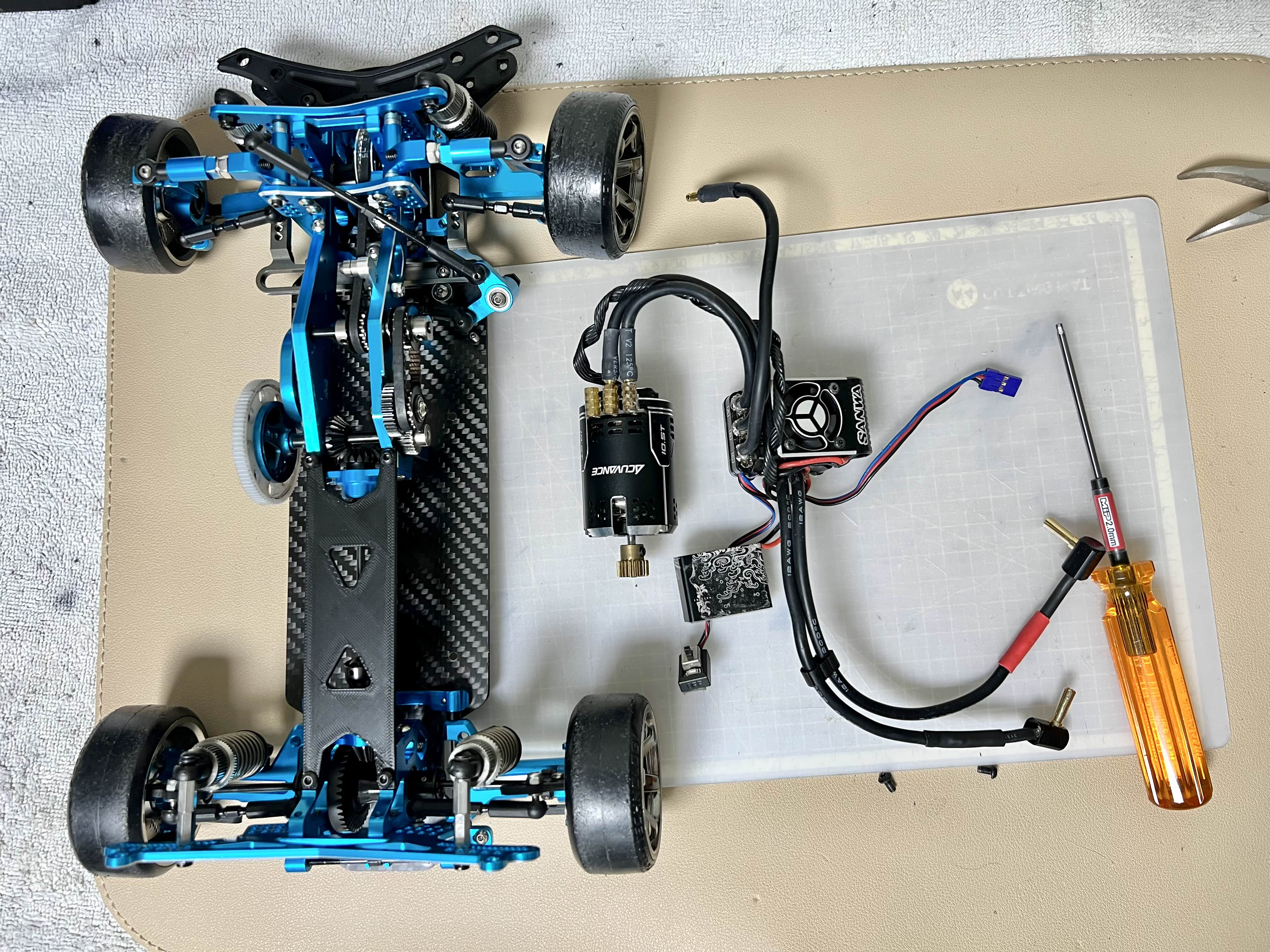
다음 글에선 기자재를 모두 올려 주행이 가능하도록 최종 완성시켜 보도록 하겠습니다.
짧은 휠베로 인해 기자재 배치가 쉽지 않아 보이니 나름 고심해서 최적의 방법을 찾아 적용해야 할것 같습니다ㅎ
다음글을 기대해 주세요
감사합니다😄
이어서 두번째글
https://kernzeroid.tistory.com/240
'RC_Car > RC 드리프트(Drift)' 카테고리의 다른 글
| [AFRC] GYS-1 V3 자이로(Gyro) 셋팅 방법 (알리발 자이로) (0) | 2025.03.21 |
|---|---|
| [휠베 225mm 제작기 2nd] - 모터 갈아내기 / 최종완성 (0) | 2025.02.04 |
| [DIY] 카본 자작 샷시 제작기 (휠베 225mm) (1) | 2024.12.24 |
| [브론즈하브] 센터 드라이브 샤프트 교체 진행 (0) | 2024.11.13 |
| 리어 윙 플레이트(Rear Wing Plate) 교체진행 (0) | 2024.11.10 |