컨제입니다.
디라이크 하이브리드 제로 섀시를 모두 조립 후 기자재까지 바꾸고 적당히 즐길정도의 주행은 되어진것 같습니다.
하지만 이미 브론즈 하이브리드와 같은 포지션이라 (휠베이스도 260으로 동일) 무언가 변화를 줘 차별화를 두고 싶습니다.

그래서 이번엔 제로 섀시를 휠베이스를 273으로 늘리는 컨버전을 진행해보려 합니다.
단순히 차체만 길어진다기 보단 주행 느낌이 완전 달라지는데,
휠베이스가 길어지면서 나오는 주행의 안정성, 그리고 리어를 날려 드리프트시 묵직함과 그로인한 파워풀한 주행을 하기 위한 목적입니다.
273으로 정해진 이유는 실차의 휠베이스 2730mm(2.73미터)를 1/10 크기로 줄여 273이 된 것이라고 합니다.
그리고 컨버전시 섀시만 자꾸면 되는게 아니고 하이브리드 특성상 모터의 구동력을 리어로 전달해주는 센터샤프트 쪽도 같이 변경을 해줘야합니다.
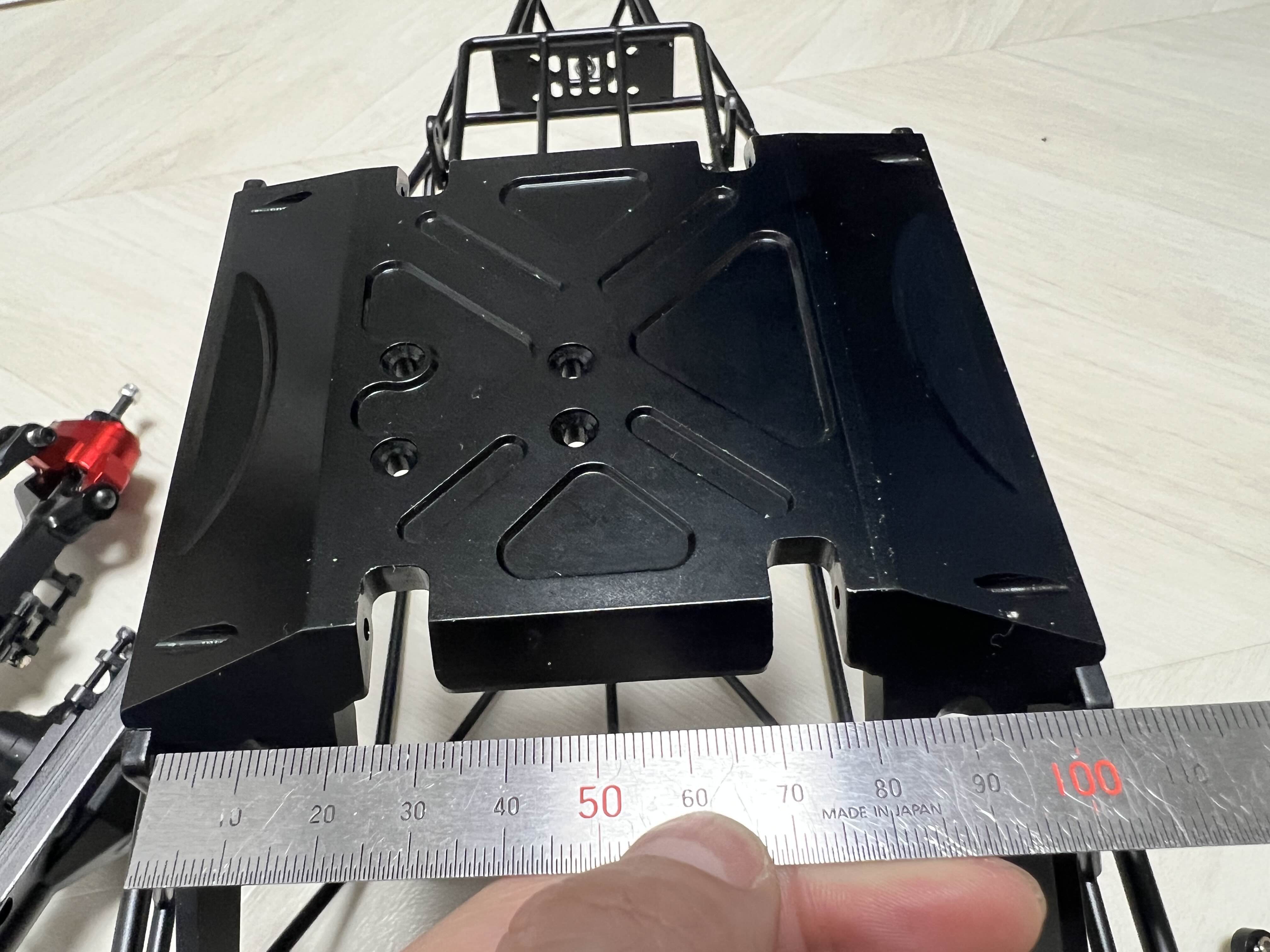
우선 섀시 품목명
【DL380】Type-JZX 273
을 준비합니다.
노멀 섀시(260mm) 보다 휠베이스가 19mm 긴 롱베이스 섀시입니다.
그리고 센터샤프트쪽 부품도 같이 교체해줄 품목도 준비합니다.
【DL484】Type-JZX 273용 베벨 기어 하우징
【DL488】Type-JZX 273용 센터 드라이컵
준비가 되었으니 컨버전을 시작해 보겠습니다.

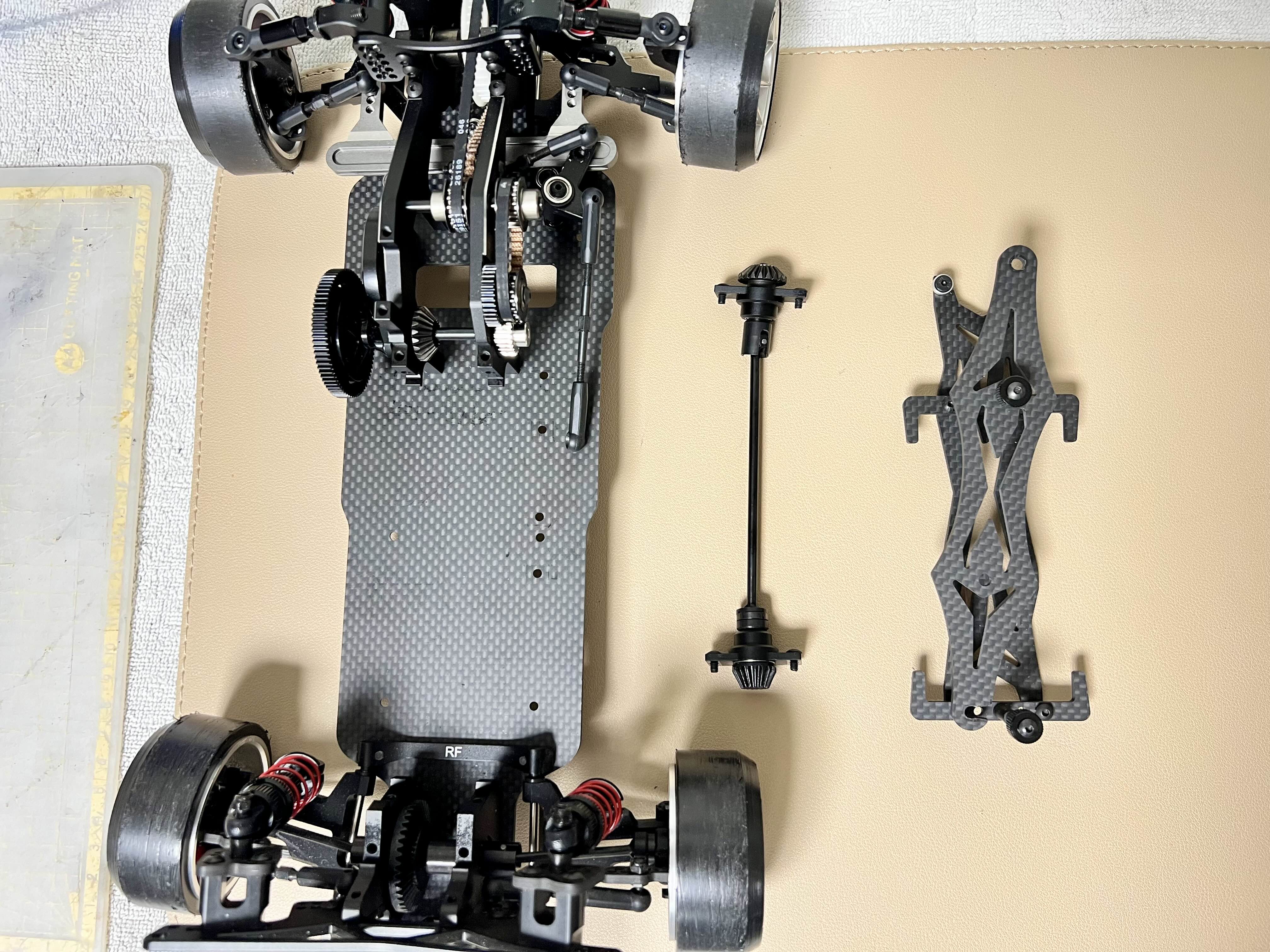
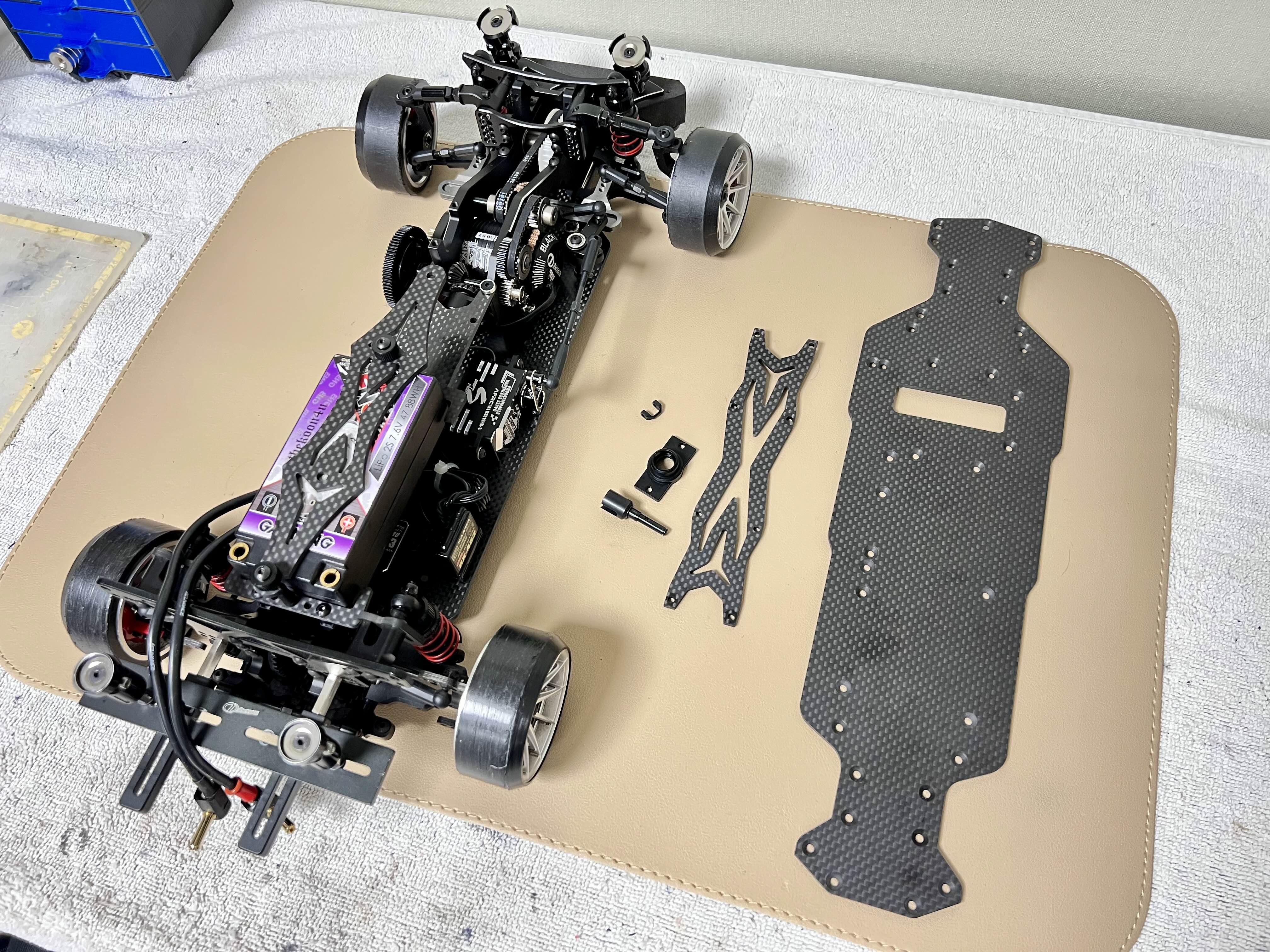
우선 필요한 부품들 입니다.

섀시와 베벨기어 하우징, 드라이브컵

우선 배터리 홀더와 센터샤프트를 제거해줍니다.
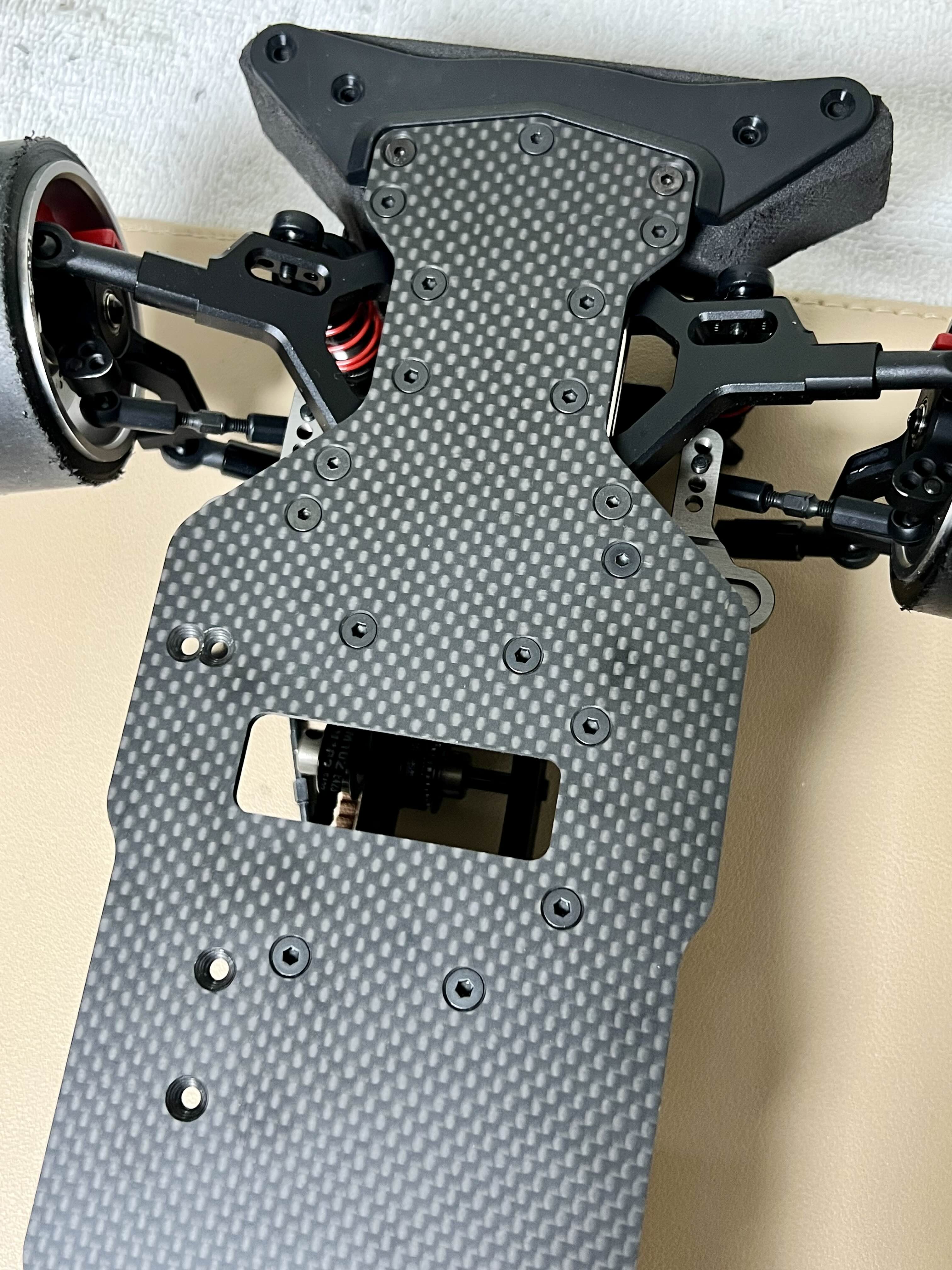
그리고 차체를 뒤집어서 볼트의 위치를 기억해둡니다.
프론트쪽 나사 연결모습
리어쪽 나사 연결모습

볼트가 상대적으로 적은 리어쪽부터 진행합니다.

볼트의 위치대로 그대로 옆으로 볼트를 풀어 옮기고
다시 273섀시에 그대로 이식시켜 줍니다.
리어는 완성

다음 프론트 차례.
볼트도 많고 연결부품이 많아 헤깔리지 않게 다른 부품이 빠져 누락되지 않게 조심히 작업을 진행합니다.

프론트도 무사히 이식 성공!

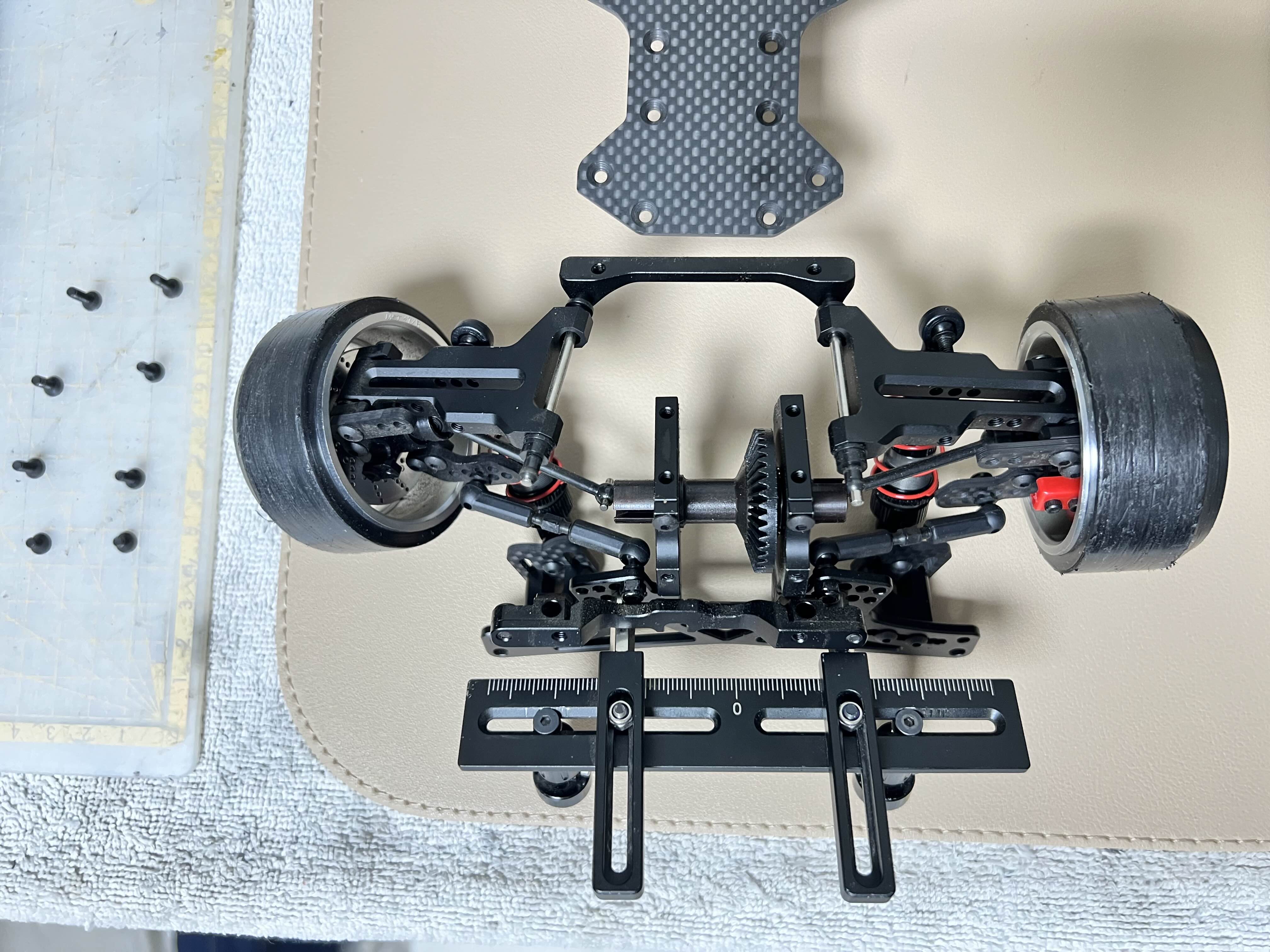
이제 센터 샤프트 차례입니다.
우선 센샤(센터샤프트 줄인말)를 분해해 베벨기어 하우징을 제거합니다.
e링 빼기가 쉽지 않은데, 자그마한 -자 드라이버로 조심스레 탈거합니다.

제거한 e링과 베벨기어 그리고 베어링을 오른쪽 긴 하우징으로 옮겨갑니다.

이때 드라이브컵을 연결해 마무리짓습니다.

롱버전 베벨기어 하우징 완성

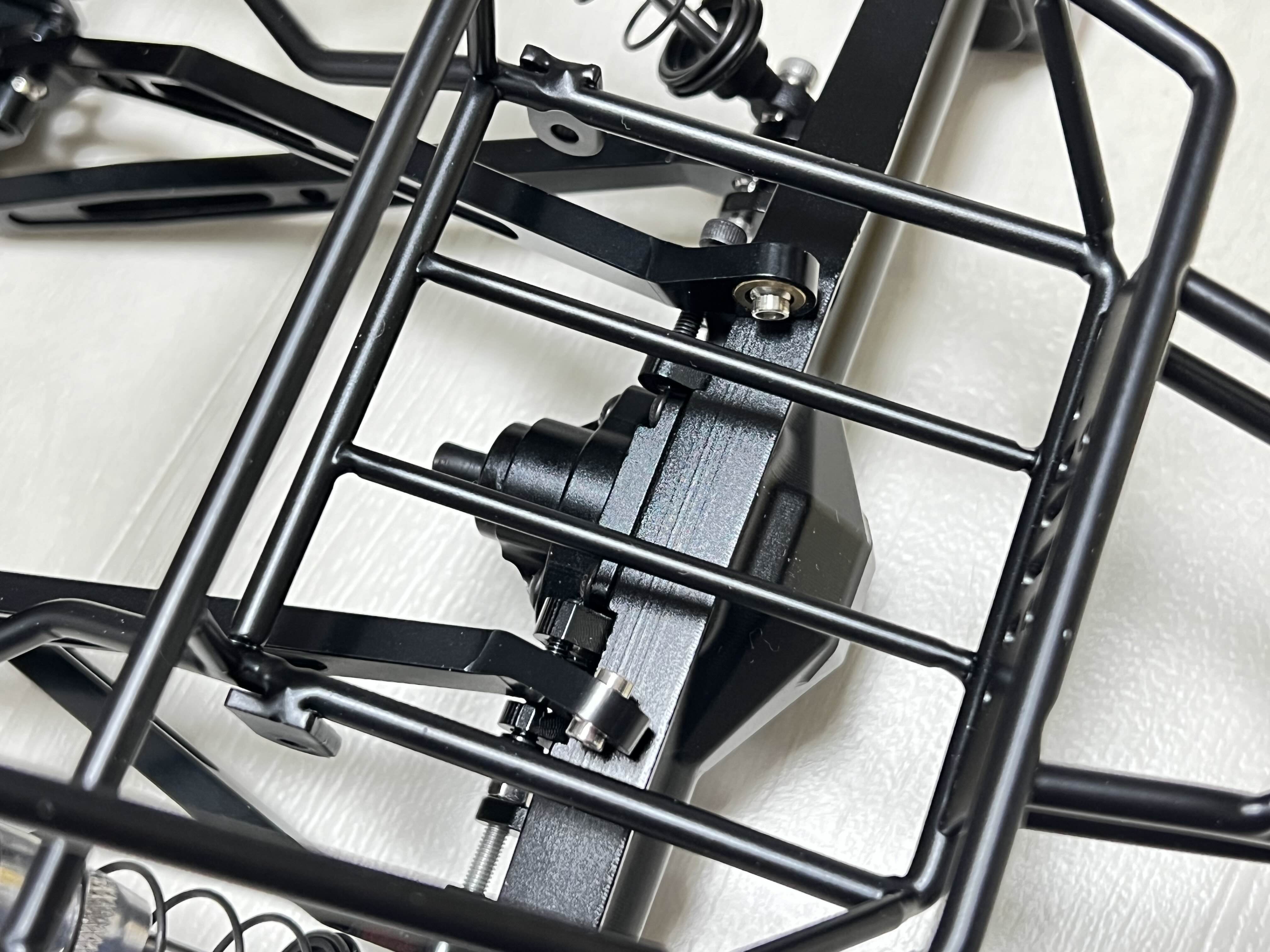
그대로 섀시에 장착해줍니다.

롱버전 하우징은 도그본(개뼈)에 연결된 핀에 끼우는 프로텍터를 제거하고 연결해줘야 합니다.
아래 사진상 바닥에 놓여있는 원래 있던 하우징은 핀부분이 크기가 좀 넓은데 롱버전 하우징은 좁아서 그렇습니다.

이로써 273 컨버전이 모두 완성되었습니다!
하지만 이게 끝이 아니죠ㅎㅎ
기자재가 모두 빠져있는 상태입니다.
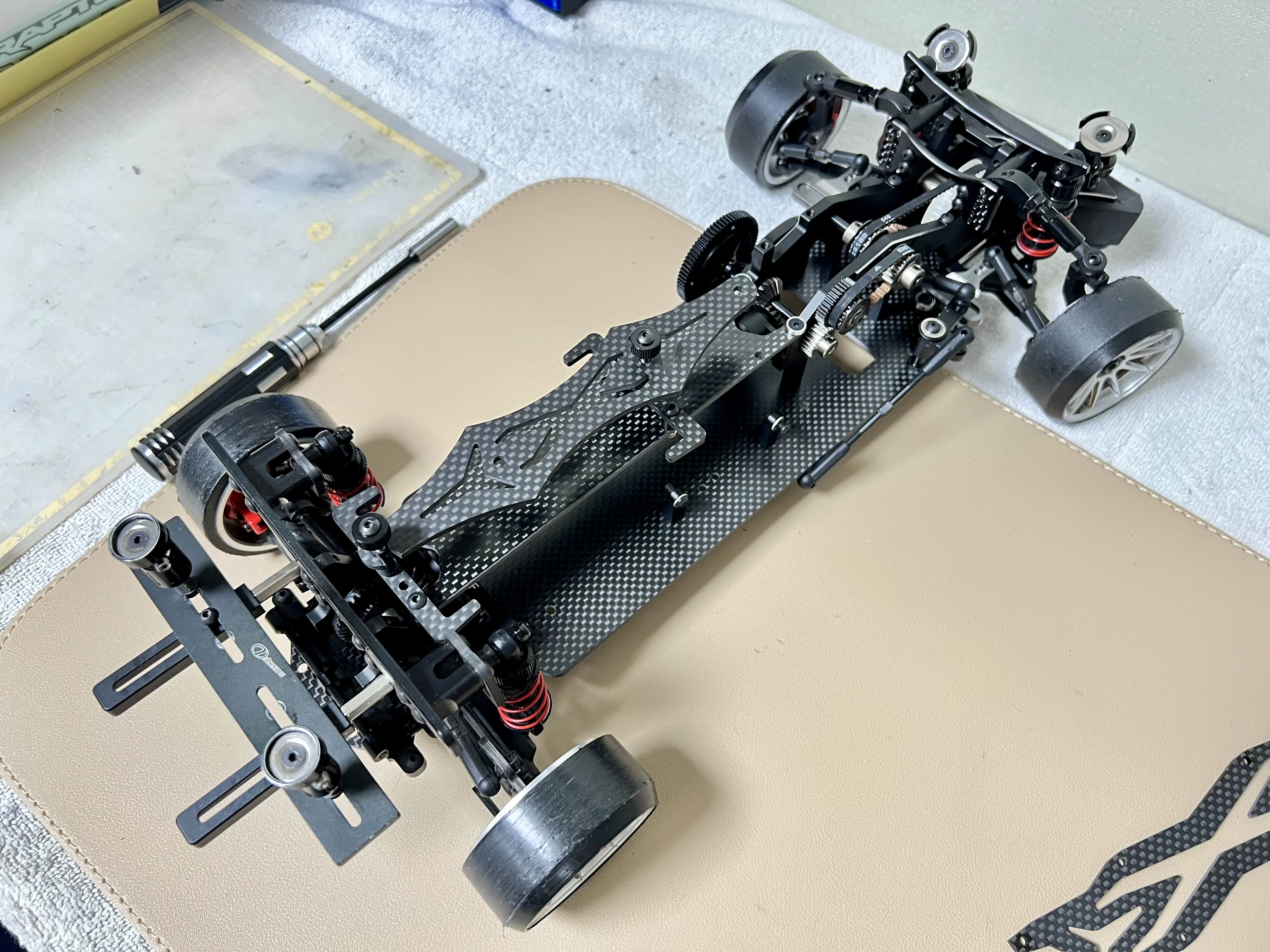
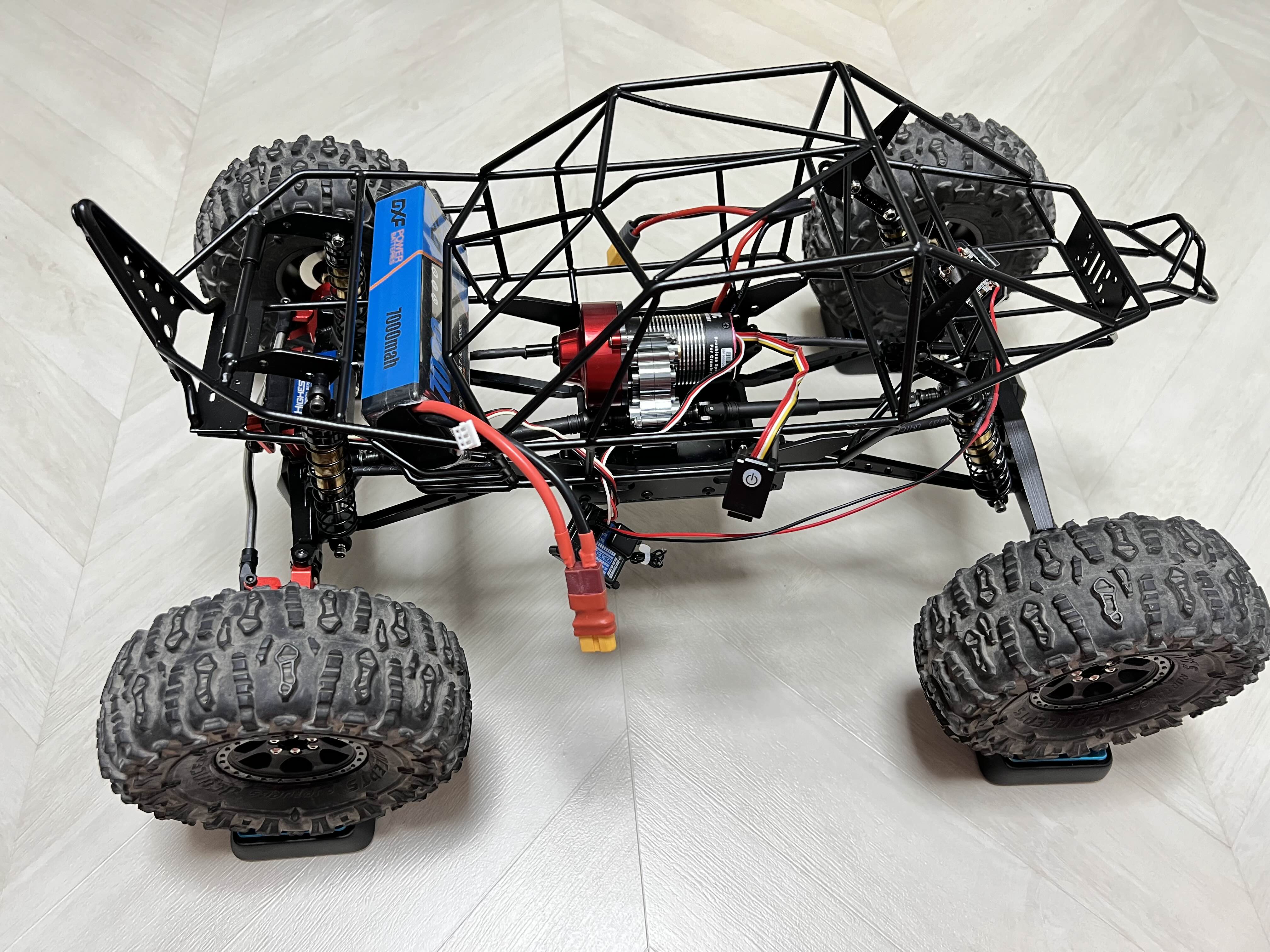
기자재를 모두 장착합니다.
섀시가 길어지니 그만큼 여유공간도 많아져 수월하게 기자재 배치가 가능합니다.

새로운 서보+자이로 조합이 기대되네요

선정리도 가급적 깔끔히 해봤습니다.

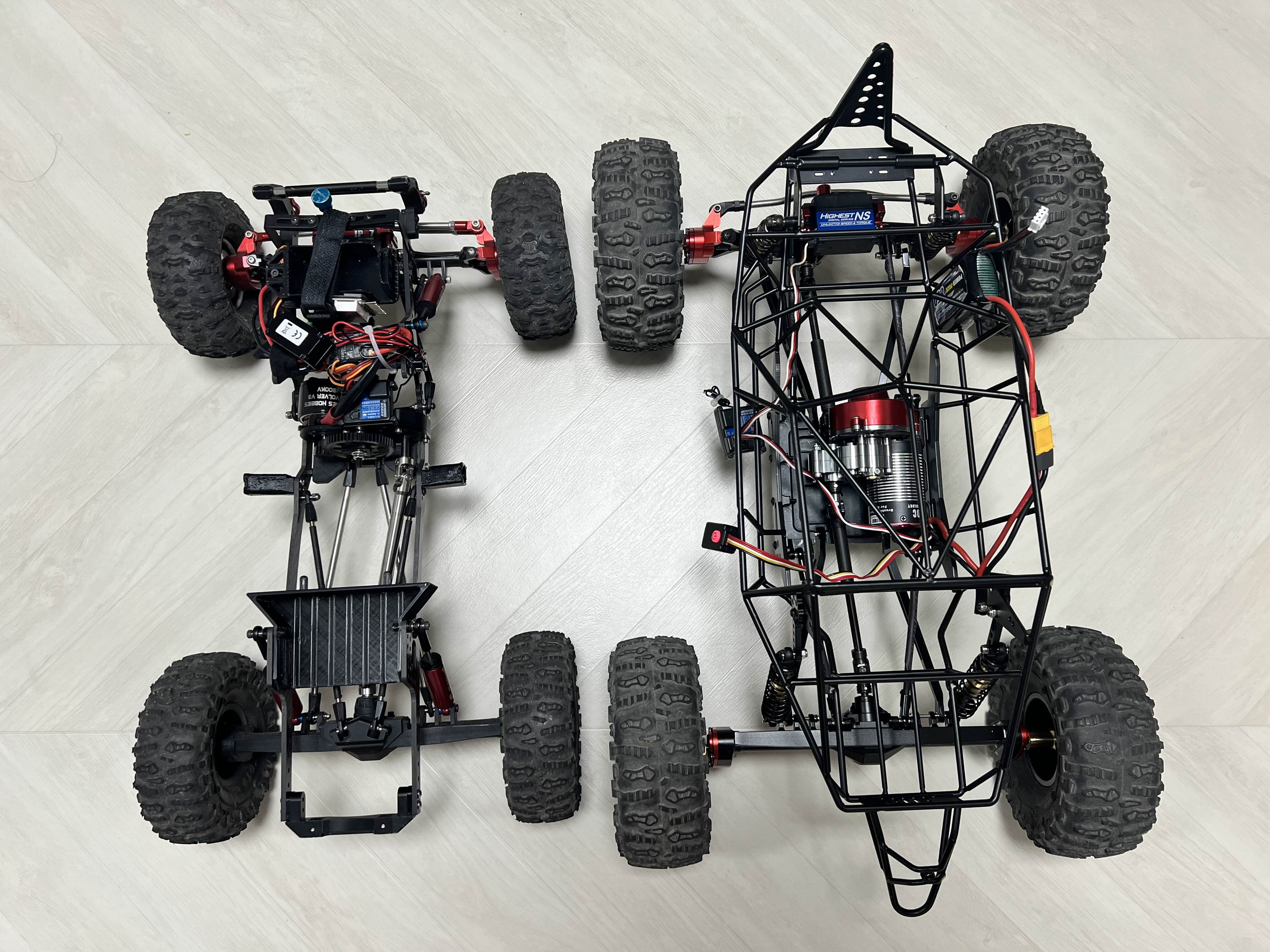
휠베 260인 브론즈 하브와의 비교샷

뒷바퀴를 같은 위치에 놓으면 앞바퀴가 차이가 나는걸 볼 수 있습니다.

컨버전 하고 남은 부품들입니다.
이로써 하이브리드 제로를 휠베이스 273으로 컨버전 해보았습니다.
아직 제대로 주행을 해본게 아니라서 느낌이 어떨지 너무 궁금한데 조만간 시간을 내어 서킷에 방문해서 주행테스트 해보고 수정할부분 또 보완해서 즐거운 주행을 주는 차로 만들어 보겠습니다.
이상 260->273 컨버전 적용기를 마칩니다.
감사합니다
- 끗 -
#d-like 273mm
'RC_Car > [드리프트RC] D-Like Hybrid 조립기' 카테고리의 다른 글
| [드리프트 RC카] 서보(Servo) 포스트 교체 적용 (1) | 2024.10.22 |
|---|---|
| [드리프트 RC카] 롱 휠베이스 273 차체 - 무게추 증량↑ (0) | 2024.09.15 |
| [드리프트 RC카] D-like RE-R Hybrid / 모터 및 자이로 변경 (0) | 2024.06.05 |
| [드리프트 RC카] D-like RE-R Hybrid / 바디 마운트 장착 및 핏팅 (0) | 2024.06.03 |
| [드리프트 RC카] D-like RE-R Hybrid 조립 - 5 / 기자재 장착 및 테스트 주행기 (0) | 2023.12.01 |